|
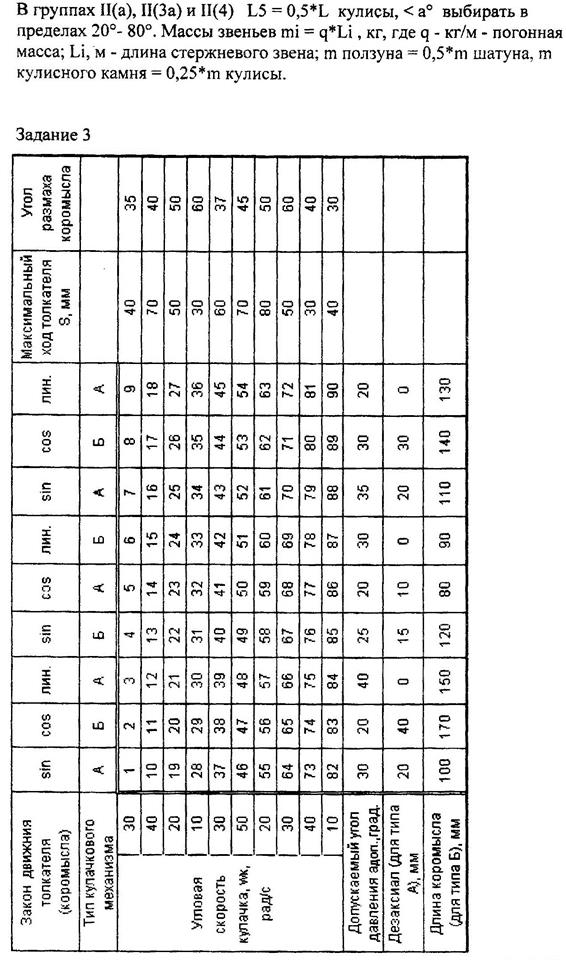
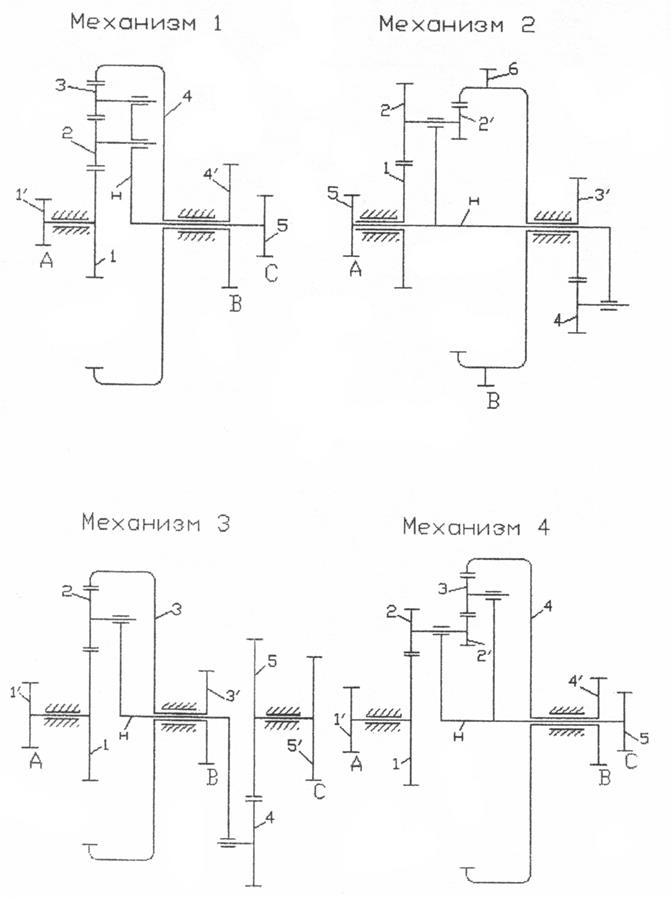
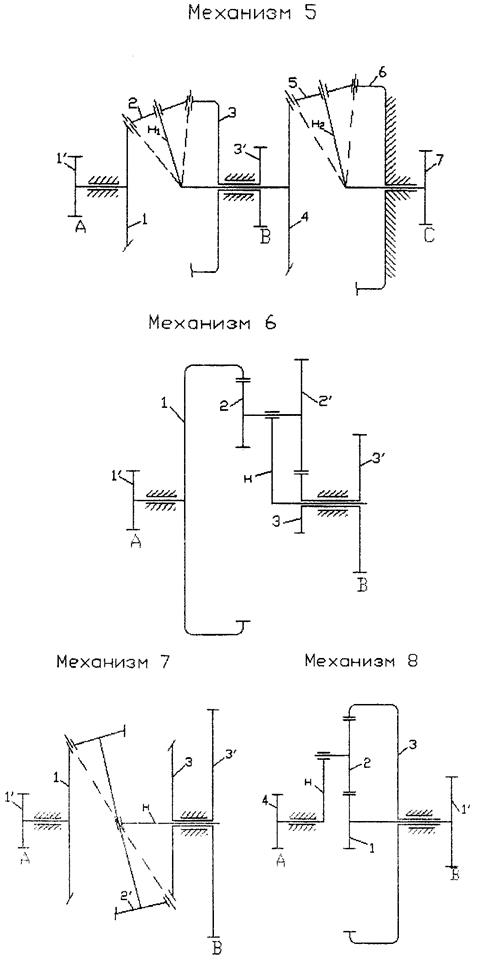
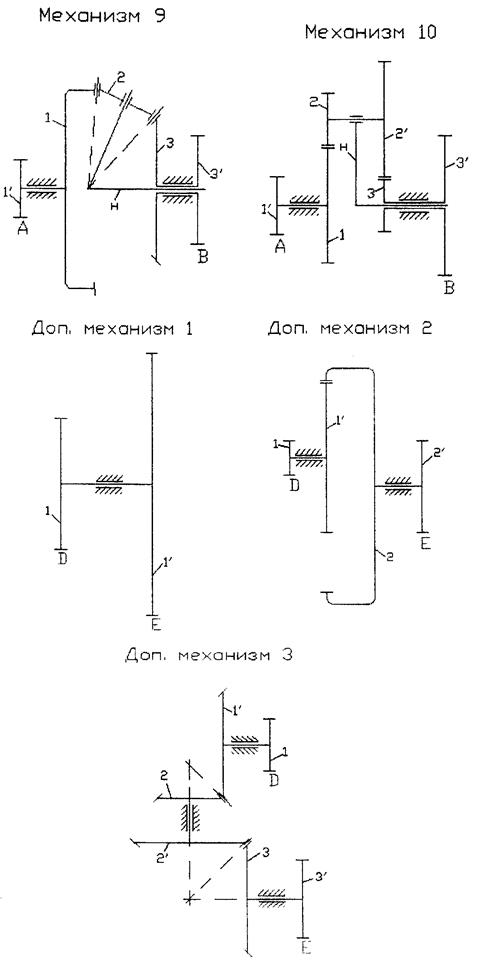
Синтез и анализ зубчатого механизма
В заданиях зубчатая передача от электродвигателя до последнего (выходного) колеса включает в себя как передачи простые (с неподвижными осями), так и планетарные, или дифференциальные (с подвижными осями). Для подсчета числа оборотов выходного звена необходимо всю передачу разбить на зоны: до дифференциала, зону дифференциала и после дифференциала. Для каждой зоны определяется передаточное отношение. Для зон до дифференциала и после дифференциала передаточное отношение определяется прямым отношением угловых скоростей зубчатых колес или обратным отношением их чисел зубьев. Число, выраженное отношением чисел зубьев, необходимо умножить на (-1)m, где m - количество внешних зацеплений. Передаточное отношение для зоны дифференциала определяется по формуле Виллиса.
Общее передаточное отношение определяется как произведение передаточных отношений всех зон.
Разделив обороты входного вала всей зубчатой передачи на общее передаточное отношение, получаем обороты выходного звена.
Следующим этапом является кинематическое исследование этой передачи графическим методом. Для этого необходимо вычертить схему зубчатой передачи в правой части листа, предварительно разделив его на две примерно равные части. В левой части предусматривается построение зубчатого зацепления.
Схема механизма вычерчивается в масштабе, пропорциональном числу зубьев колес, т.к. диаметры колес пропорциональны им. Правее схемы строится картина линейных скоростей точек зубчатого механизма, а под ней – картина угловых скоростей. Результаты, полученные на картине угловых скоростей, сравниваются с результатами, полученными аналитически.
Рассмотрим пример.
В этих задачах необходимо уметь определять передаточные отношения между звеньями механизма.
Кинематический анализ планетарного механизма
1. Определяем степень подвижности механизма:

В данном механизме подвижными звеньями являются 1, 2, 3, 4, H. Поэтому  Низшие кинематические пары образуют звенья 1 со стойкой, 2 с водилом Н, колесо 3 и стойка образуют две низшие кинематические пары, звено 4 со стойкой. Итого Низшие кинематические пары образуют звенья 1 со стойкой, 2 с водилом Н, колесо 3 и стойка образуют две низшие кинематические пары, звено 4 со стойкой. Итого  Высшие кинематические пары образуются в зацеплениях колёс, т.е. в точках А, В, С и D. Итого Высшие кинематические пары образуются в зацеплениях колёс, т.е. в точках А, В, С и D. Итого 
2. Из условия соосности найдём неизвестные числа зубьев, т.е.  и и 
Входные:

а) 

b) 

3. Пишем формулу Виллиса для каждой планетарной зоны. Для зоны 1-2-3-Н:
 (1) (1)
Для зоны 1-4-3:
 (2) (2)
Заметим, что  Данное выражение получили из уравнения (2). Подставим полученное значение Данное выражение получили из уравнения (2). Подставим полученное значение  в уравнение (1): в уравнение (1):


Данное выражение  представляет собой искомое передаточное отношение представляет собой искомое передаточное отношение 
Графический метод (рисунок14)
Графический метод необходим для проверки правильности аналитического расчёта.
На полюсную прямую выносим все точки цилиндрических передач механизма. Причём, условимся, что обозначим штрихами те точки механизма, ско-
| | | | рости которых не равны нулю и, следовательно, на полюсной прямой они обозначают только начало вектора скорости. Окончательное положение этих точек механизма будем обозначать без штрихов.
У данного механизма  поэтому откладываем произвольной величины и направления вектора скорости любой точки механизма, например, точки А. Получаем вектор поэтому откладываем произвольной величины и направления вектора скорости любой точки механизма, например, точки А. Получаем вектор  Точку Точку  соединяем с точкой О. Получаем картину 1. На картину 1 проектируем точку С. Соединяем точку С с точкой соединяем с точкой О. Получаем картину 1. На картину 1 проектируем точку С. Соединяем точку С с точкой  Получаем картину 4, на которую проектируем точку d. Затем точку d соединяем с точкой О, откуда получаем картину 3. Получаем картину 4, на которую проектируем точку d. Затем точку d соединяем с точкой О, откуда получаем картину 3.
| |
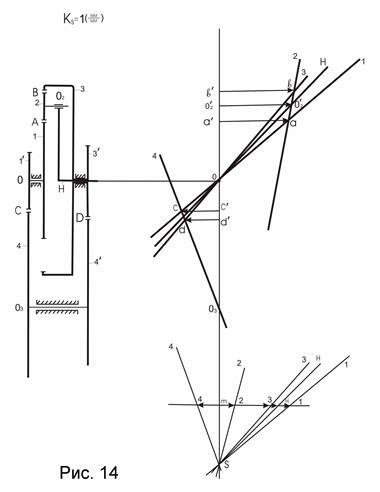
На картину 3 проектируем точку b, после чего соединяем точки b и , и получаем картину 2, на которую проектируем точку  Затем точку Затем точку  соединяем с точкой О. Получаем картину Н. соединяем с точкой О. Получаем картину Н.
Далее, получив полюсную точку m, откладываем произвольный отрезок m-S. Из точки S проводим лучи, параллельные картинам 1, 2, 3, 4, Н. Следовательно, получаем векторы:  , ,  , ,  , ,  , ,  . Искомое передаточное отношение . Искомое передаточное отношение  выражается следующим отношением: выражается следующим отношением:  . .
Синтез зубчатого зацепления (рисунок 15).
Радиусы начальных окружностей:

где  - радиус начальной окружности 4’ колеса. - радиус начальной окружности 4’ колеса.

где  - радиус начальной окружности 3’ колеса; - радиус начальной окружности 3’ колеса;

Радиусы основных окружностей:


Шаг по начальной окружности:

Размеры зуба: высота головки 
высота ножки 
Радиусы окружностей головок: 
Радиусы окружностей ножек: 
Толщина зуба  и ширина впадины и ширина впадины  по начальной окружности: по начальной окружности:

Межцентровое расстояние: 
Построив зубчатое зацепление, находим коэффициент перекрытия 

где:  - длина дуги зацепления; - длина дуги зацепления;
 - шаг зацепления; - шаг зацепления;
 - длина практической части линии зацепления; - длина практической части линии зацепления;
 - угол зацепления. - угол зацепления.
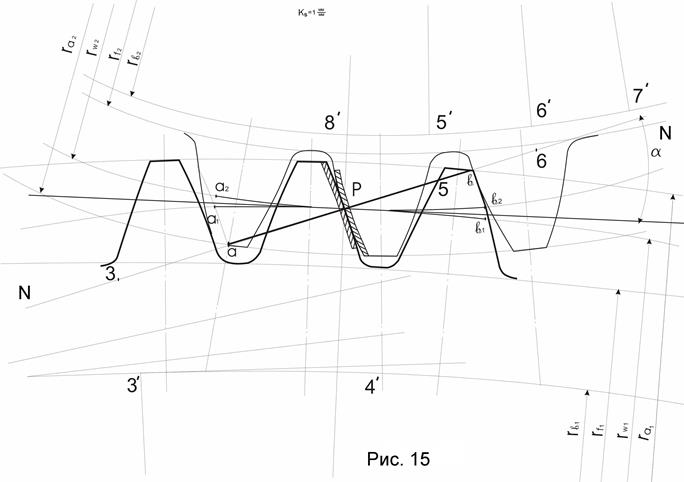
Значение коэффициента перекрытия необходимо сравнить с его значением, определяемым аналитически:
Таблица сравнения
| Параметр
| Значение
полученное
графически
| Значение
полученное
аналитически
| Погрешность,
%
| |
| 1,21
| 1,186
| 1,984
| 
| 1,847
| 1,814
| 1,787
|
СПЕЦИАЛЬНЫЕ ТАБЛИЦЫ
В настоящем руководстве приведены табл. 9.1-9.5 для неравносмещенного зацепления, составленные проф. В.Н. Кудрявцевым, и табл. 9.6 для неравносмещенного зацепления, составленная ЦКБР (Центральным конструкторским бюро редукторостроения).
Таблицы проф. В.Н. Кудрявцева содержат значения коэффициентов ξ1 и ξ2, сумма которых ξ является максимально возможной при выполнении изложенных выше основных требований.
Данными, приведенными в этих таблицах, нужно пользоваться таким образом:
1. Если 2 ≥u1,2 ≥ 1, то сначала в табл. 9.2 по заданному Z1 находят коэффициент ψ.Затем в табл.9.3 по заданным Z1 и Z2 находят коэффициенты ξ1 и ξ2. Коэффициенты ξС и α определяются по формулам (см.ниже). Угол зацепления определяют по номограмме.
2. Если 5 ≥u1,2 ≥2, то сначала в табл. 9.4 по заданному Z1 находят коэффициенты ψ и ξ1. Затем в табл. 9.5 по заданным Z1 и Z2 находят коэффициент ξ2. Далее поступают так, как описано.
Табл. 9.6 содержит коэффициенты смещения для равносмещенного зацепления.
При подборе этих коэффициентов, помимо основных требований, выполнено требование,чтобы наибольшие значения коэффициентов λ1 и λ2 на ножках были достаточно малы, а также равны между собой. При использовании табл. 9.6 нужно помнить, что должно выполняться условие ZС≥34.
Формулы для определения ξС и α:
ξС= ξ1+ ξ2
ψ =ξС- α.
Таблица 9.1 -Значения коэффициента для неравносмещённого зацепления при 2 ≥u1,2 ≥ 1
| Z1
|
|
|
|
|
|
|
| |
| 0.127
| 0.145
| 0.160
| 0.175
| 0.190
| 0.202
| 0.215
| |
|
|
|
|
|
|
|
| | Z1
|
|
|
|
|
|
|
| |
| 0.227
| 0.239
| 0.250
| 0.257
| 0.265
| 0.272
| 0.276
|
Таблица 9.2
| Z1
|
|
|
|
|
|
|
| | Z2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| |
| 0.390
| 0.395
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| |
| 0.430
| 0.372
| 0.444
| 0.444
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| |
| 0.464
| 0.354
| 0.479
| 0.423
| 0.486
| 0.486
| --
| --
| --
| --
| --
| --
| --
| --
| |
| 0.513
| 0.341
| 0.515
| 0.400
| 0.524
| 0.462
| 0.525
| 0.425
| --
| --
| --
| --
| --
| --
| |
| 0.534
| 0.330
| 0.543
| 0.386
| 0.557
| 0.443
| 0.565
| 0.506
| 0.571
| 0.571
| --
| --
| --
| --
| |
| 0.551
| 0.322
| 0.566
| 0.376
| 0.588
| 0.426
| 0.600
| 0.485
| 0.609
| 0.547
| 0.608
| 0.608
| --
| --
| |
| 0.568
| 0.317
| 0.589
| 0.365
| 0.614
| 0.414
| 0.631
| 0.468
| 0.644
| 0.526
| 0.644
| 0.586
| 0.646
| 0.646
| |
| 0.584
| 0.312
| 0.609
| 0.358
| 0.636
| 0.405
| 0.661
| 0.452
| 0.677
| 0.508
| 0.678
| 0.566
| 0.683
| 0.624
| |
| 0.601
| 0.308
| 0.626
| 0.353
| 0.659
| 0.394
| 0.686
| 0.441
| 0.706
| 0.492
| 0.716
| 0.542
| 0.720
| 0.601
| |
| 0.617
| 0.303
| 0.646
| 0.345
| 0.676
| 0.389
| 0.706
| 0.433
| 0.731
| 0.481
| 0.744
| 0.528
| 0.756
| 0.580
| |
| 0.630
| 0.299
| 0.663
| 0.341
| 0.694
| 0.384
| 0.726
| 0.426
| 0.754
| 0.472
| 0.766
| 0.519
| 0.781
| 0.568
| |
| --
| 0.297
| 0.679
| 0.337
| 0.714
| 0.376
| 0.745
| 0.419
| 0.775
| 0.463
| 0.793
| 0.507
| 0.809
| 0.554
| |
| --
| --
| 0.693
| 0.334
| 0.730
| 0.372
| 0.763
| 0.414
| 0.792
| 0.458
| 0.815
| 0.497
| 0.833
| 0.543
| |
| --
| --
| 0.706
| 0.333
| 0.745
| 0.369
| 0.780
| 0.409
| 0.813
| 0.449
| 0.834
| 0.491
| 0.856
| 0.534
| |
| --
| --
| --
| --
| 0.758
| 0.368
| 0.796
| 0.405
| 0.830
| 0.445
| 0.854
| 0.483
| 0.878
| 0.525
| |
| --
| --
| --
| --
| 0.773
| 0.365
| 0.813
| 0.400
| 0.848
| 0.440
| 0.869
| 0.480
| 0.898
| 0.517
| |
| --
| --
| --
| --
| --
| --
| 0.826
| 0.399
| 0.862
| 0.438
| 0.892
| 0.470
| 0.916
| 0.511
| |
| --
| --
| --
| --
| --
| --
| 0.840
| 0.397
| 0.881
| 0.431
| 0.907
| 0.467
| 0.936
| 0.504
| |
| --
| --
| --
| --
| --
| --
| --
| --
| 0.894
| 0.430
| 0.921
| 0.465
| 0.952
| 0.500
| |
| --
| --
| --
| --
| --
| --
| --
| --
| 0.908
| 0.428
| 0.936
| 0.462
| 0.968
| 0.496
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 0.951
| 0.459
| 0.981
| 0.495
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 0.967
| 0.455
| 0.999
| 0.490
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 1,014
| 0.487
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 1,030
| 0.483
|
| Z1
|
|
|
|
|
|
|
| | Z2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| |
| 0,684
| 0,684
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| |
| 0,723
| 0,658
| 0,720
| 0,720
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| |
| 0,756
| 0,639
| 0,756
| 0,699
| 0,755
| 0,755
| --
| --
| --
| --
| --
| --
| --
| --
| |
| 0,792
| 0,617
| 0,793
| 0,676
| 0,793
| 0,731
| 0,782
| 0,782
| --
| --
| --
| --
| --
| --
| |
| 0,814
| 0,609
| 0,830
| 0,652
| 0,831
| 0,707
| 0,821
| 0,758
| 0,812
| 0,812
| --
| --
| --
| --
| |
| 0,849
| 0,588
| 0,860
| 0,636
| 0,866
| 0,686
| 0,861
| 0,732
| 0,850
| 0,787
| 0,839
| 0,839
| --
| --
| | Z2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| ξ1
| ξ2
| |
| 0,871
| 0,579
| 0,888
| 0,622
| 0,893
| 0,673
| 0,892
| 0,715
| 0,884
| 0,761
| 0,872
| 0,820
| 0,865
| 0,865
| |
| 0,898
| 0,566
| 0,915
| 0,609
| 0,926
| 0,654
| 0,925
| 0,696
| 0,924
| 0,742
| 0,913
| 0,793
| 0,898
| 0,845
| |
| 0,916
| 0,561
| 0,937
| 0,601
| 0,948
| 0,645
| 0,951
| 0,683
| 0,950
| 0,729
| 0,946
| 0,774
| 0,934
| 0,822
| |
| 0,937
| 0,552
| 0,959
| 0,592
| 0,976
| 0,632
| 0,976
| 0,672
| 0,984
| 0,708
| 0,979
| 0,755
| 0,966
| 0,804
| |
| 0,958
| 0,543
| 0,980
| 0,583
| 0,997
| 0,624
| 1,000
| 0,662
| 1,007
| 0,700
| 1,010
| 0,737
| 1,000
| 0,784
| |
| 0,976
| 0,537
| 0,997
| 0,578
| 1,018
| 0,615
| 1,023
| 0,651
| 1,031
| 0,689
| 1,038
| 0,723
| 1,033
| 0,764
|
Продолжение табл. 9.2
|
| 0,994
| 0,532
| 1,017
| 0,571
| 1,038
| 0,608
| 1,045
| 0,641
| 1,051
| 0,678
| 1,055
| 0,718
| 1,060
| 0,750
| |
| 1,011
| 0,528
| 1,038
| 0,562
| 1,056
| 0,602
| 1,065
| 0,634
| 1,075
| 0,669
| 1,084
| 0,701
| 1,081
| 0,741
| |
| 1,026
| 0,525
| 1,054
| 0,559
| 1,076
| 0,594
| 1,082
| 0,629
| 1,094
| 0,662
| 1,101
| 0,696
| 1,105
| 0,730
| |
| 1,041
| 0,522
| 1,071
| 0,554
| 1,093
| 0,589
| 1,102
| 0,622
| 1,114
| 0,655
| 1,121
| 0,689
| 1,127
| 0,729
| |
| 1,059
| 0,516
| 1,088
| 0,550
| 1,110
| 0,584
| 1,122
| 0,614
| 1,131
| 0,650
| 1,145
| 0,678
| 1,149
| 0,719
| |
| 1,072
| 0,515
| 1,102
| 0,547
| 1,127
| 0,580
| 1,140
| 0,608
| 1,154
| 0,639
| 1,163
| 0,672
| 1,170
| 0,702
| |
| 1,088
| 0,511
| 1,117
| 0,545
| 1,141
| 0,578
| 1,157
| 0,603
| 1,172
| 0,634
| 1,180
| 0,667
| 1,188
| 0,696
| |
| --
| --
| 1,131
| 0,542
| 1,159
| 0,573
| 1,172
| 0,601
| 1,187
| 0,631
| 1,200
| 0,659
| 1,206
| 0,690
| |
| --
| --
| 1,145
| 0,540
| 1,173
| 0,570
| 1,186
| 0,599
| 1,204
| 0,626
| 1,218
| 0,653
| 1,223
| 0,685
| |
| --
| --
| --
| --
| 1,187
| 0,568
| 1,201
| 0,595
| 1,222
| 0,622
| 1,232
| 0,651
| 1,241
| 0,680
| |
| --
| --
| --
| --
| 1,201
| 0,567
| 1,218
| 0,591
| 1,233
| 0,621
| 1,249
| 0,647
| 1,260
| 0,673
| |
| --
| --
| --
| --
| --
| --
| 1,231
| 0,589
| 1,250
| 0,616
| 1,265
| 0,643
| 1,276
| 0,669
| |
| --
| --
| --
| --
| --
| --
| 1,247
| 0,586
| 1,266
| 0,612
| 1,279
| 0,640
| 1,291
| 0,665
| |
| --
| --
| --
| --
| --
| --
| --
| --
| 1,279
| 0,611
| 1,295
| 0,636
| 1,306
| 0,662
| |
| --
| --
| --
| --
| --
| --
| --
| --
| 1,293
| 0,609
| 1,310
| 0,634
| 1,321
| 0,659
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 1,325
| 0,631
| 1,336
| 0,657
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 1,338
| 0,629
| 1,350
| 0,654
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 1,365
| 0,651
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 1,379
| 0,649
|
Таблица 9.3 -Значения коэффициентов ψ и ξ1 для неравносмещенного внешнего зацепления при 5 ≥u1,2 ≥2
| Z1
|
|
|
|
|
|
|
|
|
|
|
| | ψ
| 0,16
| 0,17
| 0,18
| 0,19
| 0,20
| 0,21
| 0,22
| 0,23
| 0,24
| 0,25
| 0,25
| | ξ1
| 0,66
| 0,73
| 0,80
| 0,96
| 0,92
| 0,98
| 1,04
| 1,10
| 1,16
| 1,22
| 1,27
|
Таблица 9.4 -Значения коэффициента ξ2 для неравносмещенного внешнего зацепления при 5 ≥u1,2 ≥2
| Z1
| Значения при Z1
| |
|
|
|
|
|
|
|
|
|
|
| |
| 0,442
| 0,425
| --
| --
| --
| --
| --
| --
| --
| --
| --
| |
| 0,501
| 0,486
| 0,471
| 0,463
| --
| --
| --
| --
| --
| --
| --
| |
| 0,556
| 0,542
| 0,528
| 0,522
| 0,518
| 0,512
| 0,505
| --
| --
| --
| --
| |
| 0,610
| 0,596
| 0,582
| 0,577
| 0,575
| 0,569
| 0,564
| 0,560
| 0,553
| 0,606
| --
| |
| 0,661
| 0,648
| 0,635
| 0,632
| 0,628
| 0,624
| 0,620
| 0,616
| 0,611
| 0,662
| 0,566
| |
| 0,709
| 0,696
| 0,685
| 0,684
| 0,682
| 0,676
| 0,674
| 0,671
| 0,667
| 0,716
| 0,623
| |
| 0,754
| 0,745
| 0,734
| 0,732
| 0,731
| 0,728
| 0,727
| 0,722
| 0,720
| 0,769
| 0,677
| |
| --
| 0,789
| 0,782
| 0,780
| 0,779
| 0,778
| 0,777
| 0,773
| 0,772
| 0,820
| 0,729
| |
| --
| --
| 0,822
| 0,825
| 0,826
| 0,827
| 0,825
| 0,823
| 0,821
| 0,868
| 0,778
| |
| --
| --
| --
| 0,866
| 0,870
| 0,872
| 0,874
| 0,871
| 0,869
| 0,916
| 0,828
| |
| --
| --
| --
| --
| 0,909
| 0,914
| 0,917
| 0,920
| 0,919
| 0,965
| 0,876
| |
| --
| --
| --
| --
| --
| 0,954
| 0,957
| 0,961
| 0,962
| 1,008
| 0,924
| |
| --
| --
| --
| --
| --
| --
| 0,998
| 1,010
| 1,003
| 1,048
| 0,964
| |
| --
| --
| --
| --
| --
| --
| --
| 1,042
| 1,046
| 1,088
| 1,005
| |
| --
| --
| --
| --
| --
| --
| --
| --
| 1,086
| 1,129
| 1,045
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 1,087
| |
| --
| --
| --
| --
| --
| --
| --
| --
| --
| --
| 1,131
|
Таблица 9.5 -Значения коэффициента ξ2 для неравносмещенного внешнего зацепления при 5 ≥u1,2 ≥2
| Значения при Z1
| | Z1
|
|
|
|
|
|
|
|
|
|
|
|
| |
| --
| --
| --
| --
| --
| --
| 0,000
| --
| --
| --
| --
| --
| |
| --
| --
| --
| --
| --
| 0,060
| 0,032
| --
| --
| --
| --
| --
| |
| --
| --
| --
| --
| 0,124
| 0,094
| 0,060
| 0,030
| 0,000
| --
| --
| --
| |
| --
| --
| --
| 0,182
| 0,159
| 0,120
| 0,086
| 0,056
| 0,027
| 0,000
| --
| --
| |
| --
| --
| 0,241
| 0,220
| 0,181
| 0,144
| 0,110
| 0,080
| 0,052
| 0,025
| 0,000
| --
| |
| --
| 0,300
| 0,283
| 0,239
| 0,201
| 0,165
| 0,131
| 0,101
| 0,078
| 0,047
| 0,023
| 0,000
| |
| 0,358
| 0,343
| 0,299
| 0,256
| 0,219
| 0,183
| 0,149
| 0,119
| 0,092
| 0,067
| 0,043
| 0,021
| |
| 0,400
| 0,350
| 0,313
| 0,271
| 0,235
| 0,199
| 0,165
| 0,136
| 0,109
| 0,085
| 0,062
| 0,041
| |
| 0,400
| 0,350
| 0,326
| 0,285
| 0,248
| 0,213
| 0,180
| 0,151
| 0,125
| 0,101
| 0,079
| 0,058
| |
| 0,400
| 0,350
| 0,337
| 0,297
| 0,260
| 0,226
| 0,191
| 0,168
| 0,138
| 0,115
| 0,094
| 0,078
| |
| 0,400
| 0,350
| 0,347
| 0,308
| 0,271
| 0,238
| 0,205
| 0,178
| 0,152
| 0,128
| 0,107
| 0,087
| |
| 0,400
| 0,350
| 0,356
| 0,318
| 0,281
| 0,249
| 0,216
| 0,189
| 0,163
| 0,140
| 0,119
| 0,100
| |
| 0,400
| 0,350
| 0,364
| 0,327
| 0,291
| 0,258
| 0,226
| 0,199
| 0,173
| 0,150
| 0,130
| 0,111
|
Продолжение таблицы 9.5
|
| 0,400
| 0,350
| 0,372
| 0,335
| 0,300
| 0,266
| 0,235
| 0,208
| 0,183
| 0,160
| 0,140
| 0,122
| |
| 0,400
| 0,350
| 0,379
| 0,343
| 0,308
| 0,274
| 0,243
| 0,216
| 0,192
| 0,170
| 0,150
| 0,132
| |
| 0,400
| 0,350
| 0,385
| 0,350
| 0,315
| 0,282
| 0,251
| 0,224
| 0,200
| 0,178
| 0,159
| 0,141
| |
| 0,400
| 0,350
| 0,390
| 0,363
| 0,329
| 0,296
| 0,265
| 0,236
| 0,215
| 0,194
| 0,175
| 0,158
| |
| 0,400
| 0,350
| 0,390
| 0,375
| 0,341
| 0,309
| 0,279
| 0,253
| 0,230
| 0,210
| 0,191
| 0,174
| |
| 0,400
| 0,350
| 0,390
| 0,385
| 0,353
| 0,322
| 0,293
| 0,266
| 0,246
| 0,226
| 0,207
| 0,190
| |
| 0,400
| 0,350
| 0,390
| 0,395
| 0,363
| 0,333
| 0,306
| 0,282
| 0,260
| 0,240
| 0,222
| 0,225
| |
| 0,400
| 0,350
| 0,390
| 0,409
| 0,378
| 0,350
| 0,325
| 0,301
| 0,280
| 0,260
| 0,242
| 0,235
| |
| 0,400
| 0,350
| 0,390
| 0,422
| 0,392
| 0,366
| 0,341
| 0,319
| 0,297
| 0,277
| 0,260
| 0,243
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,404
| 0,378
| 0,354
| 0,332
| 0,312
| 0,292
| 0,275
| 0,252
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,414
| 0,399
| 0,364
| 0,343
| 0,324
| 0,305
| 0,287
| 0,271
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,423
| 0,397
| 0,374
| 0,353
| 0,334
| 0,316
| 0,299
| 0,283
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,435
| 0,409
| 0,380
| 0,366
| 0,349
| 0,331
| 0,315
| 0,300
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,445
| 0,421
| 0,398
| 0,378
| 0,361
| 0,344
| 0,328
| 0,313
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,454
| 0,430
| 0,407
| 0,387
| 0,370
| 0,358
| 0,336
| 0,320
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,459
| 0,436
| 0,414
| 0,394
| 0,376
| 0,360
| 0,344
| 0,328
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,460
| 0,440
| 0,419
| 0,400
| 0,382
| 0,365
| 0,350
| 0,335
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,460
| 0,446
| 0,425
| 0,406
| 0,388
| 0,370
| 0,355
| 0,340
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,460
| 0,448
| 0,428
| 0,408
| 0,390
| 0,373
| 0,357
| 0,342
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,460
| 0,450
| 0,431
| 0,411
| 0,393
| 0,376
| 0,361
| 0,346
| |
| 0,400
| 0,350
| 0,390
| 0,430
| 0,460
| 0,452
| 0,433
| 0,414
| 0,396
| 0,379
| 0,364
| 0,350
|
Затем определяются основные параметры зубчатых колес.
Рисунок 9.1 - Зубчатая передача внешнего зацепления
ПРИЛОЖЕНИЯ
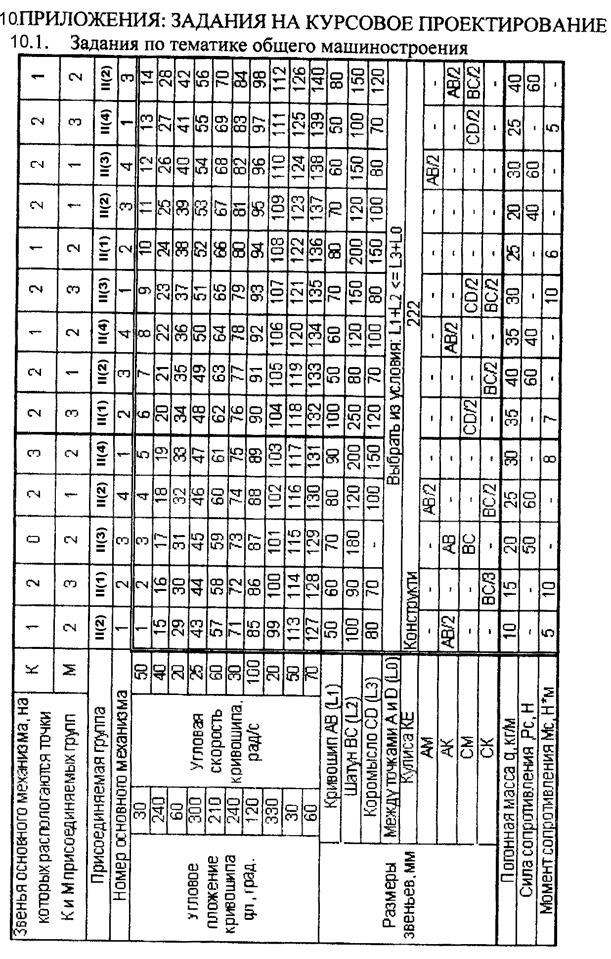
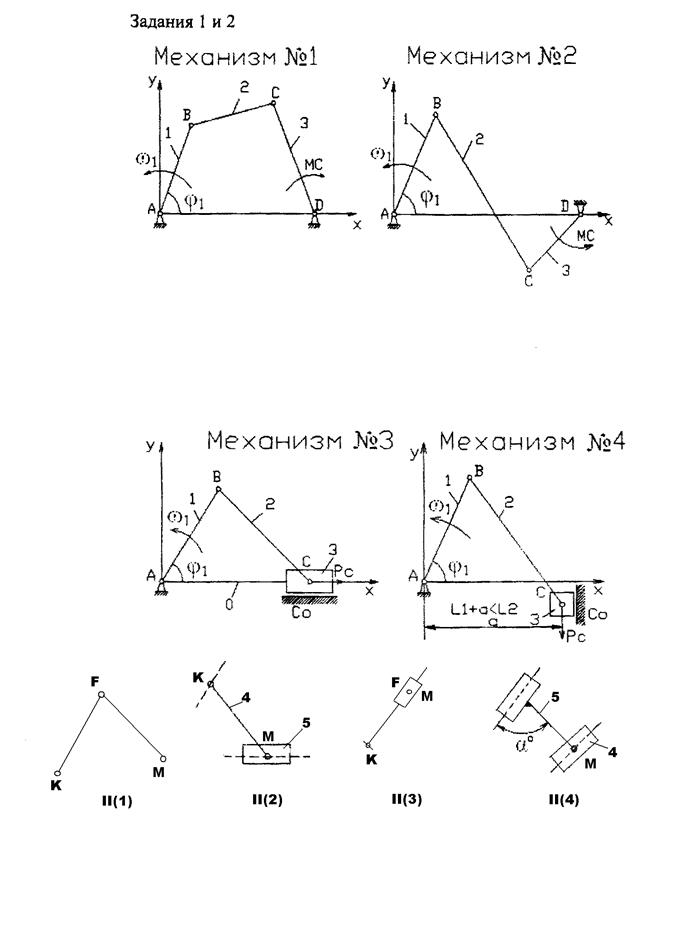
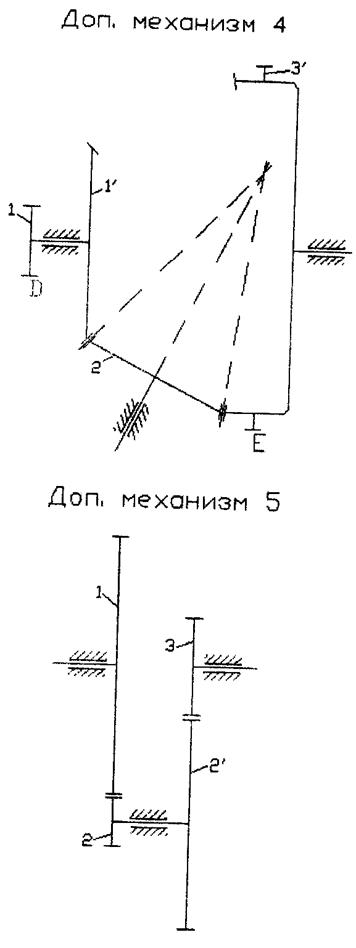
Задания по тематике общего машиностроения
| При сборке механизмов присоединить
| DkA1EkB
| DkA1EkB
| DkA1EkB
| DkA1EkB
| DkA1EkB
| DkA1EkB
| DkA1EkB
| DkA1EkB
| DkA1EkB
| DkA1EkB
| DkB1EkC
| DkA1EkB
| DkB1EkC
| DkB1EkC
| DkA1EkC
| Числа зубьев колес присоединенного механизма
| | Номер основного механизма
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Z1
| Z/1
| Z2
| Z/2
| Z3
| Z/3
| | Номер дополнительного(присоединительного) механизма
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| -
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| -
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| -
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| | Числа зубьев основного механизма
| Z/1
|
| -
|
|
|
| -
|
|
| -
|
|
|
|
|
| -
|
|
|
|
|
|
| | Z1
|
|
|
|
|
|
|
|
|
|
|
| -
|
|
|
|
|
|
|
|
|
| | Z2
|
|
|
|
|
|
|
|
|
|
| -
|
|
|
|
|
|
|
|
|
|
| | Z3
| -
|
| -
|
|
|
|
| -
| -
|
|
|
|
| -
| -
|
|
|
|
|
|
| | Z/3
| -
|
| -
| -
|
|
| -
|
|
| -
|
|
|
|
|
|
|
|
|
|
|
| | Z4
|
|
|
| -
|
|
|
| -
|
|
|
|
|
|
|
|
|
|
|
|
|
| | Z/4
| -
| -
| -
|
| -
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| | Z5
|
| -
|
|
|
|
|
|
|
|
| -
|
| -
| -
|
|
|
|
|
|
|
| | Z6
| -
|
| -
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Список контрольных вопросов
1. Механика машин и её основные разделы;
2. Основные понятия и определения в теории механизмов;
3. Рычажные механизмы;
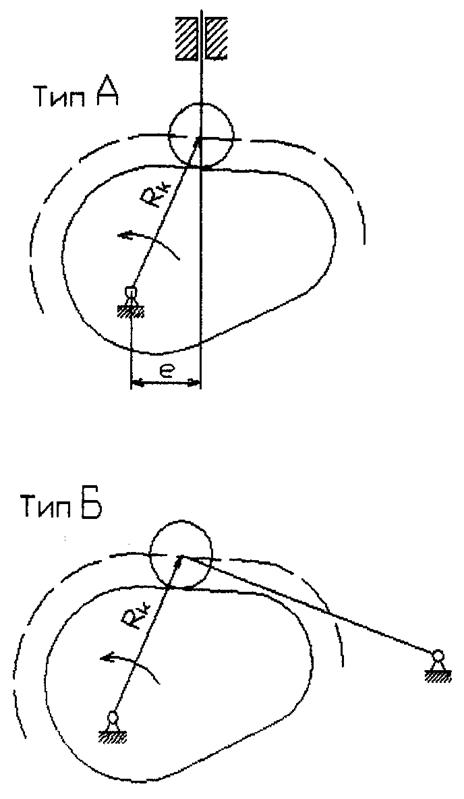
4. Кулачковые механизмы;
5. Зубчатые механизмы;
6. Клиновые и винтовые механизмы;
7. Фрикционные механизмы;
8. Механизмы с гибкими звеньями;
9. Механизмы с гидравлическими и пневматическими устройствами;
10. Механизмы с электрическими устройствами;
11. Кинематические пары и их классификация;
12. Условные изображения кинематических пар;
13. Кинематические цепи;
14. Структурная формула кинематической цепи общего вида;
15. Степени подвижности механизма;
16. Структурная формула плоских механизмов;
17. Структура плоских механизмов;
18. Заменяющие механизмы;
19. Структура пространственных механизмов;
20. Семейства механизмов;
21. Основной принцип образования механизмов и системы их классификации;
22. Структурная классификация плоских механизмов;
23. Некоторые сведенья по структурной классификации пространственных механизмов;
24. Центройды в абсолютном и относительном движении;
25. Соотношения между скоростями звеньев механизма;
26. Определение скоростей и ускорений звеньев кинематических пар;
27. Мгновенный центр ускорений и поворотный круг;
28. Огибаемые и огибающие кривые;
29. Кривизна центроид и взаимоогибаемые кривые;
30. Перманентное и начальное движение механизма;
31. Определение положений звеньев групп и построение траекторий, описываемых точками звеньев механизмов;
32. Определение скоростей и ускорений групп 2 класса;
33. Определение скоростей и ускорений групп 3 класса;
34. Построение кинематических диаграмм;
35. Кинематическое исследование механизмов методом диаграмм;
36. Механизм шарнирного четырёхзвенника;
37. Кривошипно-ползунный механизм;
38. Кулисные механизмы;
39. Определение положений;
40. Определение скоростей и ускорений;
41. Основные кинематические соотношения;
42. Механизмы фрикционных передач;
43. Механизмы трёхзвенных зубчатых передач;
44. Механизмы многозвенных зубчатых передач с неподвижными осями;
45. Механизмы планетарных зубчатых передач;
46. Механизмы некоторых типов редукторов и коробок скоростей;
47. Механизмы передач с гибкими звеньями;
48. Механизм универсального шарнира;
49. Механизм двойного универсального шарнира;
50. Механизм пространственного шарнирного четырёхзвенника;
51. Винтовые механизмы;
52. Зубчатые механизмы прерывистого и знакопеременного движения ведомого звена;
53. Механизмы с гидравлическими и пневматическими устройствами;
54. Основные задачи;
55. Задачи силового расчёта механизмов;
56. Силы, действующие на звенья механизма;
57. Диаграммы сил, работ и мощностей;
58. Механические характеристики машин;
59. Виды трения;
60. Трение скольжение несмазанных тел;
61. Трение в поступательной кинематической паре;
62. Трение в винтовой кинематической паре;
63. Трение во вращательной кинематической паре;
64. Трение скольжения см
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|






