|
|
Микросхемы памяти ОЗУ и ПЗУ.
3.1.Микросхемы памяти
Преимущество памяти, изображенной на рис. 3.28, состоит в том, что подобная структура применима при разработке памяти большого объема. Мы нарисовали схему 4x3 (для 4 слов по 3 бита каждое). Чтобы расширить ее до размеров 4x8, нужно добавить еще 5 колонок триггеров по 4 триггера в каждой, а также 5 входных и 5 выходных линий. Чтобы перейти от размера 4x3 к размеру 8x3, мы должны добавить еще четыре ряда триггеров по три триггера в каждом, а также адресную линию А2. При такой структуре число слов в памяти должно быть степенью двойки для максимальной эффективности, а число битов в слове может быть любым. Поскольку технология изготовления интегральных схем хорошо подходит для производства микросхем с внутренней структурой повторяемой плоской поверхности, микросхемы памяти являются идеальным применением для этого. С развитием технологии число битов, которое можно вместить в одной микросхеме, постоянно увеличивается, обычно в два раза каждые 18 месяцев (закон Мура). С появлением больших микросхем маленькие микросхемы не всегда устаревают из-за компромиссов между преимуществами емкости, скорости, мощности, цены и сопряжения. Обычно самые большие современные микросхемы пользуются огромным спросом и, следовательно, стоят гораздо дороже за 1 бит, чем микросхемы небольшого размера. При любом объеме памяти существует несколько различных способов орга- низации микросхемы. На рис. 3.30 показаны две возможные структуры микросхемы в 4 Мбит: 512 Кх8 и 4096 Kxl. (Размеры микросхем памяти обычно даются в битах, а не в байтах, поэтому здесь мы будем придерживаться этого соглашения.) На рис. 3.30, а можно видеть 19 адресных линий для обращения к одному из 219 байтов и 8 линий данных для загрузки или хранения выбранного байта.
Сделаем небольшое замечание по поводу терминологии. На одних выводах высокое напряжение вызывает какое-либо действие, на других - низкое напряжение. Чтобы избежать путаницы, мы будем употреблять термин «установить сигнал»,когда вызывается какое-то действие, вместо того чтобы говорить, что напряжение повышается или понижается. Таким образом, для одних выводов установка сигнала значит установку на 1, а для других - установку на 0. Названия выводов, которые устанавливаются на 0, содержат сверху черту. Сигнал CS устанавливается на 1, а сигнал CS - на 0. Противоположный термин - «сбросить». А теперь вернемся к нашей микросхеме. Поскольку обычно компьютер содержит много микросхем памяти, нужен сигнал для выбора необходимой микросхемы, такой, чтобы нужная нам микросхема реагировала на вызов, а остальные нет. Сигнал CS (Chip Select - выбор элемента памяти) используется именно для этой цели. Он устанавливается, чтобы запустить микросхему. Кроме того, нужен способ отличия считывания от записи. Сигнал WE (Write Enable — разрешение записи) используется для указания того, что данные должны записываться, а не считываться. Наконец, сигнал (Ж (Output Enable - разрешение выдачи выходных сигналов) устанавливается для выдачи выходных сигналов. Когда этого сигнала нет, выход отсоединен от остальной части схемы. На рис. 3.30, б используется другая схема адресации. Микросхема представляет собой матрицу 2048x2048 однобитных ячеек, что составляет 4 Мбит. Чтобы обратиться к микросхеме, сначала нужно выбрать строку. Для этого И-битный номер этой строки подается на адресные выводы. Затем устанавливается сигнал RAS (Row Address Strobe - строб адреса строки). После этого на адресные выводы подается номер столбца и устанавливается сигнал CAS (Column Address Strobe - строб адреса столбца). Микросхема реагирует на сигнал, принимая или выдавая 1 бит данных. Большие микросхемы памяти часто производятся в виде матриц mxn, обращение к которым происходит по строке и столбцу. Такая организация памяти сокращает число необходимых выводов, но, с другой стороны, замедляет обращение к микросхеме, поскольку требуется два цикла адресации: один для строки, а другой для столбца. Чтобы ускорить этот процесс, в некоторых микросхемах можно вызывать адрес ряда, а затем несколько адресов столбцов для доступа к последовательным битам ряда. Много лет назад самые большие микросхемы памяти обычно были устроены так, как показано на рис. 3.30, б. Поскольку слова выросли от 8 до 32 битов и выше, использовать подобные микросхемы стало неудобно. Чтобы из микросхем 4096 Kxl построить память с 32-битными словами, требуется 32 микросхемы, работающие параллельно. Эти 32 микросхемы имеют общий объем, по крайней мере, 16 Мбайт. Если использовать микросхемы 512 Кх8, то потребуется всего 4 микросхемы, но при этом объем памяти будет составлять 2 Мбайт. Чтобы избежать наличия 32 микросхем, большинство производителей выпускают семейства микросхем с длиной слов 1,4, 8 и 16 битов.
3.2.ОЗУ и ПЗУ
Все виды памяти, которые мы рассматривали до сих пор, имеют одно общее свойство: в них можно и записывать информацию, и считывать ее. Такая память называется ОЗУ (оперативное запоминающее устройство). Существует два типа ОЗУ: статическое и динамическое. Статическое ОЗУ конструируется с использованием D-триггеров. Информация в ОЗУ сохраняется на протяжении всего времени, пока к нему подается питание: секунды, минуты, часы и даже дни. Статическое ОЗУ работает очень быстро. Обычно время доступа составляет несколько наносекунд. По этой причине статическое ОЗУ часто используется в качестве кэш-памяти второго уровня. В динамическом ОЗУ, напротив, триггеры не используются. Динамическое ОЗУ представляет собой массив ячеек, каждая из которых содержит транзистор и крошечный конденсатор. Конденсаторы могут быть заряженными и разряженными, что позволяет хранить нули и единицы. Поскольку электрический заряд имеет тенденцию исчезать, каждый бит в динамическом ОЗУ должен обновляться (перезаряжаться) каждые несколько миллисекунд, чтобы предотвратить утечку данных. Поскольку об обновлении должна заботиться внешняя логика, динамическое ОЗУ требует более сложного сопряжения, чем статическое, хотя этот недостаток компенсируется большим объемом. Поскольку динамическому ОЗУ нужен только 1 транзистор и 1 конденсатор на бит (статическому ОЗУ требуется в лучшем случае 6 транзисторов на бит), динамическое ОЗУ имеет очень высокую плотность записи (много битов на одну микросхему). По этой причине основная память почти всегда строится на основе динамических ОЗУ. Однако динамические ОЗУ работают очень медленно (время доступа занимает десятки наносекунд). Таким образом, сочетание кэш-памяти на основе статического ОЗУ и основной памяти на основе динамического ОЗУ соединяет в себе преимущества обоих устройств. Существует несколько типов динамических ОЗУ. Самый древний тип, кото- рый все еще используется, - FPM (Fast Page Mode - быстрый постраничный режим). Это ОЗУ представляет собой матрицу битов. Аппаратное обеспечение представляет адрес строки, а затем - адреса столбцов (мы описывали этот процесс, когда говорили об устройстве памяти, показанном на рис. 3.30, 6). FPM постепенно замещается EDO1 (Extended Data Output - память с расши- ренными возможностями вывода), которая позволяет обращаться к памяти еще до того, как закончилось предыдущее обращение. Такой конвейерный режим не ускоряет доступ к памяти, но зато увеличивает пропускную способность, выдавая больше слов в секунду. И FPM, и EDO являются асинхронными. В отличие от них так называемое синхронное динамическое ОЗУ управляется одним синхронизирующим сигналом. Данное устройство представляет собой гибрид статического и динамического ОЗУ. Синхронное динамическое ОЗУ часто используется при производстве кэш-памяти большого объема. Возможно, данная технология в будущем станет наиболее предпочтительной и в изготовлении основной памяти. ОЗУ - не единственный тип микросхем памяти. Во многих случаях данные должны сохраняться, даже если питание отключено (например, если речь идет об игрушках, различных приборах и машинах). Более того, после установки ни программы, ни данные не должны изменяться. Эти требования привели к появлению ПЗУ (постоянных запоминающих устройств), которые не позволяют изменять и стирать хранящуюся в них информацию (ни умышленно, ни случайно). Данные записываются в ПЗУ в процессе производства. Для этого изготавливается трафарет с определенным набором битов, который накладывается на фоточувствительный материал, а затем открытые (или закрытые) части поверхности вытравливаются. Единственный способ изменить программу в ПЗУ - поменять целую микросхему. ПЗУ стоят гораздо дешевле ОЗУ, если заказывать их большими партиями, чтобы оплатить расходы на изготовление трафарета. Однако они не допускают изменений после выпуска с производства, а между подачей заказа на ПЗУ и его выполнением может пройти несколько недель. Чтобы компаниям было проще разрабатывать новые устройства, основанные на ПЗУ, были выпущены программируемые ПЗУ. В отличие от обычных ПЗУ, их можно программировать в условиях эксплуатации, что позволяет сократить время выполнения заказа. Многие программируемые ПЗУ содержат массив крошечных плавких перемычек. Можно пережечь определенную перемычку, если выбрать нужную строку и нужный столбец, а затем приложить высокое напряжение к определенному выводу микросхемы. Следующая разработка этой линии - стираемое программируемое ПЗУ, которое можно не только программировать в условиях эксплуатации, но и стирать с него информацию. Если кварцевое окно в данном ПЗУ подвергать воздействию сильного ультрафиолетового света в течение 15 минут, все биты установятся на 1. Если нужно сделать много изменений во время одного этапа проектирования, стираемые ПЗУ гораздо экономичнее, чем обычные программируемые ПЗУ, поскольку их можно использовать многократно. Стираемые программируемые ПЗУ обычно устроены так же, как статические ОЗУ. Например, микросхема 27С040 имеет структуру, которая показана на рис. 3.30, а, а такая структура типична для статического ОЗУ. Следующий этап - электронно-перепрограммируемое ПЗУ, с которого мож- но стирать информацию, прилагая к нему импульсы, и которое не нужно для этого помещать в специальную камеру, чтобы подвергнуть воздействию ультрафиолетовых лучей. Кроме того, чтобы перепрограммировать данное устройство, его не нужно вставлять в специальный аппарат для программирования, в отличие от стираемого программируемого ПЗУ, Но с другой стороны, самые большие электронно-перепрограммируемые ПЗУ в 64 раза меньше обычных стираемых ПЗУ, и работают они в два раза медленнее. Электронно-перепрограммируемые ПЗУ не могут конкурировать с динамическими и статическими ОЗУ, поскольку они работают в 10 раз медленнее, их емкость в 100 раз меньше, и они стоят гораздо дороже. Они используются только в тех ситуациях, когда необходимо сохранение информации при выключении питания. Более современный тип электронно-перепрограммируемого ПЗУ - флэш-память. В отличие от стираемого ПЗУ, которое стирается под воздействием ультрафиолетовых лучей, и от электронно-программируемого ПЗУ, которое стирается по байтам, флэш-память стирается и записывается блоками. Как и любое электронно-перепрограммируемое ПЗУ, флэш-память можно стирать, не вынимая ее из микросхемы. Многие изготовители производят небольшие печатные платы, содержащие десятки мегабайтов флэш-памяти. Они используются для хранения изображений в цифровых камерах и для других целей. Возможно, когда-нибудь флэш-память вытеснит диски, что будет грандиозным шагом вперед, учитывая время доступа в 100 не. Основной технической проблемой в данный момент является то, что флэш-память изнашивается после 10 000 стираний, а диски могут служить годами независимо от того, сколько раз они перезаписывались. Краткое описание различных типов памяти дано в табл. 3.2.
Лекция 8. Микросхемы управления и сопряжения. 1. Микросхемы процессора. 2. Шины и принципы их работы. 3. Средства сопряжения.
Микросхемы процессоров
Все современные процессоры помещаются на одной микросхеме. Это делает вполне определенным их взаимодействие с остальными частями системы. Каждая микросхема процессора содержит набор выводов, через которые происходит обмен информацией с внешним миром. Одни выводы передают сигналы от центрального процессора, другие принимают сигналы от других компонентов, третьи делают и то и другое. Изучив функции всех выводов, мы сможем узнать, как процессор взаимодействует с памятью и устройствами ввода-вывода на цифровом логическом уровне. Выводы микросхемы центрального процессора можно подразделить на три типа: адресные, информационные и управляющие. Эти выводы связаны с соответствующими выводами на микросхемах памяти и микросхемах устройств ввода-вывода через набор параллельных проводов (так называемую шину). Чтобы вызвать команду, центральный процессор сначала посылает в память адрес этой команды по адресным выводам. Затем он запускает одну или несколько линий управления, чтобы сообщить памяти, что ему нужно, например, прочитать слово. Память выдает ответ, помещая требуемое слово на информационные выводы процессора и посылая сигнал о том, что это сделано. Когда центральный процессор получает данный сигнал, он принимает слово и выполняет вызванную команду. Команда может требовать чтения или записи слов, содержащих данные. В этом случае весь процесс повторяется для каждого дополнительного слова. Как происходит процесс чтения и записи, мы подробно рассмотрим ниже. Важно понимать, что центральный процессор обменивается информацией с памятью и устройствами ввода-вывода, подавая сигналы на выводы и принимая сигналы на входы. Другого способа обмена информацией не существует. Число адресных выводов и число информационных выводов - два ключевых параметра, которые определяют производительность процессора. Микросхема, содержащая m адресных выводов, может обращаться к 2т ячейкам памяти. Обычно m равно 16, 20, 32 или 64. Микросхема, содержащая п информационных выводов, может считывать или записывать n-битное слово за одну операцию. Обычно п равно 8,16,32,36 или 64. Центральному процессору с 8 информационными выводами понадобится 4 операции, чтобы считать 32-битное слово, тогда как процессор, имеющий 32 информационных вывода, может сделать ту же работу в одну операцию. Следовательно, микросхема с 32 информационными выводами работает гораздо быстрее, но и стоит гораздо дороже. Кроме адресных и информационных выводов каждый процессор содержит выводы управления. Выводы управления регулируют и синхронизируют поток данных к процессору и от него, а также выполняют другие разнообразные функции. Все процессоры содержат выводы для питания (обычно +3,3 В или +5 В), «земли» и синхронизирующего сигнала (меандра). Остальные выводы разнятся от процессора к процессору. Тем не менее выводы управления можно разделить на несколько основных категорий: 1. Управление шиной. 2. Прерывание. 3. Арбитраж шины. 4. Состояние. 5. Разное. Ниже мы кратко опишем каждую из этих категорий. Когда мы будем рассматривать микросхемы Pentium II, UltraSPARC II и picojava II, мы дадим более подробную информацию. Схема типичного центрального процессора, в котором используются эти типы сигналов, изображена на рис. 3.31.
Выводы управления шиной по большей части представляют собой выходы из центрального процессора в шину (и следовательно, входы в микросхемы памяти и микросхемы устройств ввода-вывода). Они сообщают, что процессор хочет считать информацию из памяти, или записать информацию в память, или сделать что-нибудь еще. Выводы прерывания - это входы из устройств ввода-вывода в процессор. В большинстве систем процессор может дать сигнал устройству ввода-вывода начать операцию, а затем приступить к какому-нибудь другому действию, пока устройство ввода-вывода выполняет свою работу. Когда устройство ввода-вывода заканчивает свою работу, контроллер ввода-вывода посылает сигнал на один из выводов прерывания, чтобы прервать работу процессора и заставить его обслуживать устройство ввода-вывода (например, проверять ошибки ввода-вывода). Некоторые процессоры содержат выходной вывод, чтобы подтверждать получение сигнала прерывания. Выводы разрешения конфликтов в шине нужны для того, чтобы регулировать поток информации в шине, то есть не допускать таких ситуаций, когда два устройства пытаются воспользоваться шиной одновременно. В целях разрешения конфликтов центральный процессор считается устройством. Некоторые центральные процессоры могут работать с различными сопроцессорами (например, с графическими процессорами, процессорами с плавающей точкой и т. п.). Чтобы обеспечить обмен информации между процессором и сопроцессором, нужны специальные выводы для передачи сигналов. Кроме этих выводов у некоторых процессоров есть различные дополнитель- ные выводы. Одни из них выдают или принимают информацию о состоянии, другие нужны для перезагрузки компьютера, а третьи - для обеспечения совместимости со старыми микросхемами устройств ввода-вывода.
Шины и принципы их работы.
2.1.Шины
Шина - это группа проводников, соединяющих различные устройства. Шины можно разделить на группы в соответствии с выполняемыми функциями. Они могут быть внутренними по отношению к процессору и служить для передачи данных в АЛУ и из АЛУ, а могут быть внешними по отношению к процессору и связывать процессор с памятью или устройствами ввода-вывода. Каждый тип шины обладает определенными свойствами, и к каждому из них предъявляются определенные требования. В этом и следующих разделах мы сосредоточимся на шинах, которые связывают центральный процессор с памятью и устройствами ввода-вывода. В следующей главе мы подробно рассмотрим внутренние шины процессора. Первые персональные компьютеры имели одну внешнюю шину, которая называлась системной шиной. Она состояла из нескольких медных проводов (от 50 до 100), которые встраивались в материнскую плату. На материнской плате находились разъемы на одинаковых расстояниях друг от друга для микросхем памяти и устройств ввода-вывода. Современные персональные компьютеры обычно содержат специальную шину между центральным процессором и памятью и по крайней мере еще одну шину для устройств ввода-вывода. На рис. 3.32 изображена система с одной шиной памяти и одной шиной ввода-вывода. В литературе шины обычно изображаются в виде жирных стрелок, как показано на этом рисунке. Разница между жирной и нежирной стрелкой небольшая. Когда все биты одного типа, например адресные или информационные, рисуется обычная стрелка. Когда включаются адресные линии, линии данных и управления, используется жирная стрелка. Хотя разработчики процессоров могут использовать любой тип шины для микросхемы, должны быть введены четкие правила о том, как работает шина, и все устройства, связанные с шиной, должны подчиняться этим правилам, чтобы платы, которые выпускаются третьими лицами, подходили к системной шине. Эти правила называются протоколом шины. Кроме того, должны существовать определенные технические требования, чтобы платы от третьих производителей подходили к каркасу для печатных плат и имели разъемы, соответствующие материнской плате механически и с точки зрения мощностей, синхронизации и т. д.
Существует ряд широко используемых в компьютерном мире шин. Приведем несколько примеров: Omnibus (PDP-8), Unibus (PDP-11), IBM PC (PC/XT), ISA (PC/AT), EISA (80386), MicroChannel (PC/2), PCI (различные персональные компьютеры), SCSI (различные персональные компьютеры и рабочие станции), Nubus (Macintosh), Universal Serial Bus (современные персональные компьютеры), FireWire (бытовая электроника), VME (оборудование в кабинетах физики) и Сагаас (физика высоких энергий). Может быть, все стало бы намного проще, если бы все шины, кроме одной, исчезли с поверхности Земли (или кроме двух). К сожалению, стандартизация в этой области кажется маловероятной, и уже вложено слишком много средств во все эти несовместимые системы. Давайте начнем с того, как работают шины. Некоторые устройства, связанные с шиной, являются активными и могут инициировать передачу информации по шине, тогда как другие являются пассивными и ждут запросов. Активное устройство называется задающим устройством, пассивное - подчиненным устройством. Когда центральный процессор требует от контроллера диска считать или записать блок информации, центральный процессор действует как задающее устройство, а контроллер диска - как подчиненное устройство. Контроллер диска может действовать как задающее устройство, когда он командует памяти принять слова, которые считал с диска. Несколько типичных комбинаций задающего и подчиненного устройств указаны в табл. 3.3. Память ни при каких обстоятельствах не может быть задающим устройством.
Двоичные сигналы, которые выдают устройства компьютера, часто недостаточно интенсивны, чтобы активизировать шину, особенно если она достаточно длинная и если к ней подсоединено много устройств. По этой причине большинство задающих устройств шины обычно связаны с ней через микросхему, которая называется драйвером шины, по существу являющуюся двоичным усилителем. Сходным образом большинство подчиненных устройств связаны с шиной приемником шины. Для устройств, которые могут быть и задающим, и подчиненным устройством, используется приемопередатчик шины. Эти микросхемы взаимодействия с шиной часто являются устройствами с тремя состояниями, что дает им возможность отсоединяться, когда они не нужны. Иногда они подключаются через открытый коллектор, что дает сходный эффект. Когда одно или несколько устройств на открытом коллекторе требуют доступа к шине в одно и то же время, результатом является булева операция ИЛИ над всеми этими сигналами. Такое соглашение называется монтажным ИЛИ. В большинстве шин одни линии являются устройствами с тремя состояниями, а другие, которым требуется свойство монтажного ИЛИ, - открытым коллектором. Как и процессор, шина имеет адресные линии, информационные линии и линии управления. Тем не менее между выводами процессора и сигналами шины может и не быть взаимно однозначного соответствия. Например, некоторые процессоры содержат три вывода, которые выдают сигнал чтения из памяти или записи в память, или чтения устройства ввода-вывода, или записи на устройство ввода-вывода, или какой-либо другой операции. Обычная шина может содержать одну линию для чтения из памяти, вторую линию для записи в память, третью – для чтения устройства ввода-вывода, четвертую - для записи на устройство ввода-вывода и т. д. Микросхема-декодер должна тогда связывать данный процессор с такой шиной, чтобы преобразовывать 3-битный кодированный сигнал в отдельные сигналы, которые могут управлять линиями шины. Разработка шин и принципы действия шин - это достаточно сложные вопросы и по этому поводу написан ряд книг [128, 135,136]. Принципиальными вопросами в разработке являются ширина шины, синхронизация шины, арбитраж шины и функционирование шины. Все эти параметры существенно влияют на скорость и пропускную способность шины. В следующих четырех разделах мы рассмотрим каждый из них.
2.2.Принципы работы шины
До этого момента мы обсуждали только обычные циклы шины, когда задающее устройство (обычно центральный процессор) считывает информацию из подчиненного устройства (обычно из памяти) или записывает в него информацию. Однако существует еще несколько типов циклов шины. Давайте рассмотрим некоторые из них. Обычно за раз передается одно слово. При использовании кэш-памяти жела- тельно сразу вызывать всю строку кэш-памяти (то есть 16 последовательных 32-битных слов). Часто передача блоками может быть более эффективна, чем такая последовательная передача информации. Когда начинается чтение блока, задающее устройство сообщает подчиненному устройству, сколько слов нужно передать (например, помещая общее число слов на информационные линии в период Ti). Вместо того чтобы выдать в ответ одно слово, задающее устройство выдает одно слово в течение каждого цикла до тех пор, пока не будет передано требуемое количество слов. На рис. 3.38 изображена такая же схема, как и на рис. 3.34, только здесь появился дополнительный сигнал BLOCK, который указывает, что запрашивается передача блока. В данном примере считывание блока из 4 слов занимает 6 циклов вместо 12.
Существуют также другие типы циклов шины. Например, если речь идет о системах с двумя или несколькими центральными процессорами на одной шине, нужно быть уверенным, что в конкретный момент только один центральный процессор может использовать определенную структуру данных в памяти. Чтобы упорядочить этот процесс, в памяти должна содержаться переменная, которая принимает значение 0, когда центральный процессор использует структуру данных, и 1, когда структура данных не используется. Если центральному процессору нужно получить доступ к структуре данных, он должен считать переменную, и если она равна О, придать ей значение 1. Проблема заключается в том, что два центральных процессора могут считать переменную на последовательных циклах шины. Если каждый процессор видит, что переменная равна 0, а затем каждый процессор меняет значение переменной на 1, как будто только он один использует эту структуру данных, то такая последовательность событий ведет к хаосу. Чтобы предотвратить такую ситуацию, в многопроцессорных системах предусмотрен специальный цикл шины, который дает возможность любому процессору считать слово из памяти, проверить и изменить его, а затем записать обратно в память; весь этот процесс происходит без освобождения шины. Такой цикл не дает возможности другим центральным процессорам использовать шину и, следовательно, мешать работе первого процессора. Еще один важный цикл шины - цикл для осуществления прерываний. Когда центральный процессор командует устройству ввода-вывода произвести какое-то действие, он ожидает прерывания после завершения работы. Для сигнала прерывания нужна шина. Поскольку может сложиться ситуация, когда несколько устройств одновременно хотят произвести прерывание, здесь имеют место те же проблемы разрешения конфликтных ситуаций, что и в обычных циклах шины. Чтобы избежать таких проблем, нужно каждому устройству приписать определенный приоритет и использовать централизованный арбитр для распределения приоритетов. Существует стандартный контроллер прерываний, который широко используется. В компьютерах IBM PC и последующих моделях применяется микросхема Intel 8259А. Она изображена на рис. 3.39.
До восьми контроллеров ввода-вывода могут быть непосредственно связаны с восемью входами IRx (Interrupt Request - запрос прерывания) микросхемы 8259А. Когда любое из этих устройств хочет произвести прерывание, оно запускает свою линию входа Если активизируется один или несколько входов, контроллер 8259А выдает сигнал INT (INTerrupt - прерывание), который подается на соответствующий вход центрального процессора Когда центральный процессор способен произвести прерывание, он посылает микросхеме 8259А импульс через вывод INTA (INTerrupt Acknowledge - подтверждение прерывания) В этот момент микросхема 8259А должна определить, на какой именно вход поступил сигнал прерывания. Для этого она помещает номер входа на информационную шину. Эта операция требует наличия особого цикла шины. Центральный процессор использует этот номер для обращения в таблицу указателей, которую называют таблицей векторов прерывания, чтобы найти адрес процедуры, производящей соответствующее прерывание Микросхема 8259А содержит несколько регистров, которые центральный процессор может считывать и записывать, используя обычные циклы шины и выводы RD (ReaD - чтение), WR (WRite - запись), CS (Chip Select - выбор элемента памяти) и Xfl. Когда программное обеспечение обработало прерывание и готово получить следующее, оно записывает специальный код в один из регистров, который вызывает сброс сигнала INT микросхемой 8259А, если не появляется другая задержка прерывания Регистры также могут записываться для того, чтобы ввести микросхему 8259А в один из нескольких режимов, и для выполнения некоторых других функций Когда присутствует более восьми устройств ввода-вывода, микросхемы 8259А могут быть соединены каскадно. В самой экстремальной ситуации все восемь входов могут быть связаны с выходами еще восьми микросхем 8259 А, соединяя до 64 устройств ввода-вывода в двухступенчатую систему прерывания Микросхема 8259А содержит несколько выводов для управления каскадированием, но мы их опустили ради простоты. Хотя мы никоим образом не исчерпали все вопросы разработки шин, материал, изложенный выше, дает достаточно информации для общего понимания принципов работы шины и того, как центральный процессор взаимодействует с шиной А теперь мы перейдем от общего к частному и рассмотрим несколько конкретных примеров процессоров и их шин.
Средства сопряжения Обычная компьютерная система малого или среднего размера состоит из микросхемы процессора, микросхем памяти и нескольких контроллеров ввода-вывода. Все эти микросхемы соединены шиной. Мы уже рассмотрели память, центральные процессоры и шины. Теперь настало время изучить микросхемы ввода-вывода. Именно через эти микросхемы компьютер обменивается информацией с внешними устройствами.
3.1.Микросхемы ввода-вывода
В настоящее время существует множество различных микросхем ввода-вывода. Новые микросхемы появляются постоянно Из наиболее распространенных можно назвать UART, USART, контроллеры CRT (CRT - электронно-лучевая трубка), дисковые контроллеры и PIO. UART (Universal Asynchronous Receiver Transmitter - универсальный асинхронный приемопередатчик) - это микросхема, которая может считывать байт из шины данных и передавать этот байт по битам на линию последовательной передачи к терминалу или получать данные от терминала. Скорость работы микросхем UART различна: от 50 до 19 200 бит/с; ширина знака от 5 до 8 битов; 1,1,5 или 2 стоповых бита. Микросхема может обеспечивать проверку на четность или на нечетность, контроль по четности может также отсутствовать, все это находится под управлением программ. Микросхема USART (Universal Synchronous Asynchronous Receiver Transmitter- универсальный синхронно-асинхронный приемопередатчик) может осуществлять синхронную передачу, используя ряд протоколов. Она также выполняет все функции UART. Поскольку микросхемы UART мы уже рассматривали в главе 2, сейчас в качестве примера микросхемы ввода-вывода мы возьмем параллельный интерфейс.
3.2.Микросхемы PIO
Типичным примером микросхемы PIO (Parallel Input/Output - параллельный ввод-вывод) является Intel 8255A (рис. 3.51). Она содержит 24 линии ввода-вывода и может сопрягаться с любыми устройствами, совместимыми с TTL-схемами (например, клавиатурами, переключателями, индикаторами, принтерами) Программа центрального процессора может записать 0 или 1 на любую линию или считать входное состояние любой линии, обеспечивая высокую гибкость. Микросхема PIO часто заменяет целую плату с микросхемами МИС и СИС (особенно во встроенных системах). Центральный процессор может конфигурировать микросхему 8255А различными способами, загружая регистры состояния микросхемы, и мы остановимся на некоторых наиболее простых режимах работы. Можно представить данную микросхему в виде трех 8-битных портов А, В и С. С каждым портом связан 8-битный регистр. Чтобы установить линии на порт, центральный процессор записывает 8-битное число в соответствующий регистр, и это 8-битное число появляется на выходных линиях и остается там до тех пор, пока регистр не будет перезаписан. Чтобы использовать порт для входа, центральный процессор просто считывает соответствующий регистр.
Другие режимы работы предусматривают квитирование связи с внешними устройствами. Например, чтобы передать данные устройству, микросхема 8255А может представить данные на порт вывода и подождать, пока устройство не выдаст сигнал о том, что данные получены и можно посылать еще. В данную микросхему включены необходимые логические схемы для фиксирования таких импульсов и передачи их центральному процессору. Из рис. 3.51 мы видим, что помимо 24 выводов для трех портов микросхема 8255А содержит восемь линий, непосредственно связанных с шиной данных, линию выбора элемента памяти, линии чтения и записи, две адресные линии и линию для переустановки микросхемы. Две адресные линии выбирают один из четырех внутренних регистров, три из которых соответствуют портам А, В и С. Четвертый регистр - регистр состояния. Он определяет, какие порты используются для входа, а какие для выхода, а также выполняет некоторые другие функции. Обычно две адресные линии соединяются с двумя младшими битами адресной шины.
3.3.Декодирование адреса
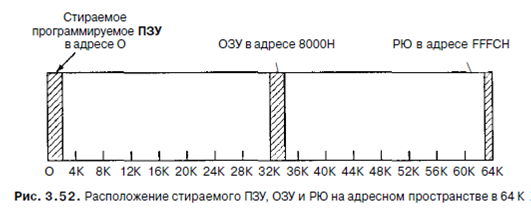
До настоящего момента мы не останавливались подробно на том, как происходит выбор микросхемы памяти или устройства ввода-вывода. Пришло время этоузнать. Рассмотрим простой 16-битный встроенный компьютер, состоящий из центрального процессора, стираемого программируемого ПЗУ объемом 2Кх8 байт для хранения программы, ОЗУ объемом 2Кх8 байт для хранения данных и микросхемы PIO. Такая небольшая система может встраиваться в дешевую игрушку или простой прибор. Вместо стираемого программируемого ПЗУ может использоваться обычное ПЗУ. Микросхема PIO может быть выбрана одним из двух способов: как устройство ввода-вывода или как часть памяти. Если микросхема нам нужна в качестве устройства ввода-вывода, мы должны выбрать ее, используя внешнюю линию шины, которая показывает, что мы обращаемся к устройству ввода-вывода, а не к памяти. Если мы применяем другой подход, так называемый ввод-вывод с распределением памяти, мы должны присвоить микросхеме 4 байта памяти для трех портов и регистра управления. Наш выбор в какой-то степени произволен. Мы выбираем ввод-вывод с распределением памяти, поскольку этот метод наглядно иллюстрирует некоторые интересные проблемы сопряжения. Стираемому программируемому ПЗУ требуется 2 К адресного пространства, ОЗУ требуется также 2 К адресного пространства, а микросхеме РЮ нужно 4 байта. Поскольку в нашем примере адресное пространство составляет 64 К, мы должны выбрать, где поместить данные три устройства. Один из возможных вариантов показан на рис. 3.52. Стираемое программируемое ПЗУ занимает адреса до 2 К, ОЗУ занимает адреса от 32 К до 34 К, а РЮ - 4 старших байта адресного пространства, от 65532 до 65535. С точки зрения программиста не важно, какие именно адреса использовать, однако для сопряжения это имеет большое значение. Если бы мы обращались к РЮ через пространство ввода-вывода, нам не потребовались бы адреса памяти (зато понадобились бы четыре адреса пространства ввода-вывода).
При таком распределении адресов (рис. 3.52) стираемое ПЗУ нужно выбирать с помощью 16-битного адреса памяти ОООООххххххххххх (в двоичной системе). Другими словами, любой адрес, у которого пять старших битов равны 0, попадает в область памяти до 2 К и, следовательно, в стираемое ПЗУ. Таким образом, сигнал выбора стираемого ПЗУ можно связать с 5-разрядным компаратором, у которого один из входов всегда будет соединен с 00000. Чтобы достичь того же результата, лучше было бы использовать пятивходовый вентиль ИЛИ, у которого пять входов связаны с адресными линиями от А11 до А15. Выходной сигнал будет равен 0 тогда и только тогда, когда все пять линий равны 0. В этом случае устанавливается сигнал US. К сожалению, в стандартных сериях МИС не существует пятивходовых вентилей ИЛИ. Однако мы можем испо   Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|