
|
|
Защита от превышения напряжения и скоростиОсуществляется с помощью реле максимального напряжения и, как правило, центробежного датчика скорости (см. рисунок 2.37). Путевая защита Назначение: запрещает движение рабочего органа механизма далее конечного положения.
Блокировки в системах АЭП Назначение: блокировки повышают надежность систем АЭП за счет организации правильного порядка работы схем. По назначению блокировки делятся: - защитные; - технологические. По исполнени: - внутренние (в данной АЭП); - внешние.
Защитные блокировки 1) Блокировка замыкающего контакта пусковой кнопки (см. рисунок 2.39), где К – обеспечивает самопитание контактора при отпускании кнопки и нулевую защиту. 2) Блокировка реверсивных контакторов. Исключает одновременное включение реверсивных контакторов, одновременное срабатывание которых вызывает короткое замыкание питающей сети. 2.1) С помощью размыкающих контактов пусковых кнопок (рисунок 2.40). 2.2) С помощью размыкающих блок-контактов контакторов (рисунок 2.41). 2.3) С помощью механической блокировки подвижных частей контактора (принцип качель). Для повышения общей надежности при реализации схем кроме механической блокировки ставят одну из электрических блокировок. 3) Блокировки путевые (аналог путевой защиты). 4)
Технологические блокировки Обеспечивают определенную последовательность работы схем. Пример внутренней технологической блокировки – на рисунке 2.43. Реле времени КТ3 выполняет роль внутренней технологической блокировки (РДТ), которое запрещает включение контактора противоположного направления, пока не закончилось динамическое торможение.
Сигнализация в системах АЭП 1. Контрольная. 2. Технологическая. 3. Аварийная. Контрольная сигнализация
Служит для контроля наличия сигнала или состояния аппарата (см. рисунок 2.45). Технологическая сигнализация Указывает последовательность операций, совершаемых системой АЭП (см. рисунок 2.46).
Аварийная сигнализация
Указывает на аварийное состояние схемы, либо на срабатывание той или иной защиты (см. рисунок 2.47).
Принцип построения щита аварийной сигнализации – это принцип темного табло, т.е. ни одна из ламп при нормальном режиме работы не должна гореть. Сигнализации бывают: – световая; – звуковая; – указательная.
Станции управления Станции управления (СУ) – это объединенная общая конструкция комплектного устройства, предназначенного для дистанционного управления электроустановкой. В схему добавлены аппараты защиты, а также, элементы для обеспечения блокировок с другими устройствами.
Реверсивный магнитный пускатель Самой простой станцией управления является магнитный пускатель, предназначенный для пуска АД с к.з. ротором при мощности менее 75 кВт.
Пример реверсивного магнитного пускателя – на рисунке 2.48, где приняты обозначения: QS – не автоматический выключатель; FU1 ¸ FU2 – предохранители для силовой цепи и цепи управления; KM1, KM2 - реверсивные контактеры; KK1, KK2 – тепловые реле; S1 ¸ S3 – кнопочная станция. Схема обеспечивает: пуск двигателя по естественной характеристике, реверс с торможением противовключением, останов (S1) под действием Мс на выбеге. В схеме предусмотрены защиты: максимальная токовая (с помощью предохранителей), тепловая (с помощью тепловых реле), нулевая (осуществляется контактором).
Станция управления ПУ13-21 Схема релейно-контактная реверсивного электропривода постоянного тока с двухзонным регулированием скорости – станция управления ПУ13-21. Предназначена для управления ДПТ средней и большой мощности, работающих в повторно-кратковременном режиме. Станция имеет по три положения вперед и назад, обеспечивает пуск до естественной механической характеристики в три ступени вфункции времени, разгон во второй зоне в функции тока, динамическое торможение в функции скорости (см. рисунок 2.49).
На рисунке приняты обозначения: В1, В2, В3 – выключатели не автоматические; РМ1, РМ2 – реле максимального тока (максимальная токовая защита); РУП, КУП – реле и контактор управления полем; РДВ, РДН – реле динамического торможения с направлением ”вперед”, ”назад”; КДТ – контактор динамического торможения; РОП – реле обрыва поля (минимальная токовая защита); ЭМТ, КМТ – электромагнит и контактор механического тормоза; РН – реле напряжения (защита от самозапуска); КУ – ключ управления; КЛ, КВ, КН – контакторы (линейный, вперед, назад); КУ1, КУ2, КУ3 – контакторы ускорения; РУ, РУ2, РУ3 – реле ускорения; КЭ – контактор экономический (для уменьшения тока в цепи ОВ на стоянке привода); РКУ – реле контроля ускорения (замкнутый контакт при работе в первой зоне обеспечивает номинальное поле, при торможении из второй зоны контакт РКУ замыкается с выдержкой времени, достаточной для организации усиления поля в функции тока); R1, R2, R3 – пусковые ступени сопротивления; R4 – резистор динамического торможения; R5 – регулируемое сопротивление (определяет рабочую точку при ослаблении поля во второй зоне); R6 – резистор, служащий для уменьшения тока в обмотке возбуждения на стоянке; R7 – резистор, служащий для защиты от перенапряжений вместе с диодом VD; R8 – резистор, служащий для уменьшения постоянной времени, при увеличении потерь в цепи катушки КУП (чтобы он успевал реагировать на замыкание и размыкание контактора РУП); ВКВ, ВКН – конечные выключатели для направления вперед и назад; ПР1¸ПР4 – предохранители. Исходное состояние: включены В1, В2, В3, КУ – в нуле; включены РОП, РУ1. В цепи ОВ1 суммарное сопротивление (R5+R6) – экономический режим, ЭМТ – обесточен, электродвигатель заторможен. Установившейся режим: КУ в первом положении (вперед, назад), разгон по ИХ1 (R1+R2+R3); КУ во втором положении (вперед, назад), разгон по ИХ2 (R2+R3); КУ в третьем положении (вперед, назад), разгон по: ЕХ при R5=0, ИХ при R5 ¹ 0. Пуск с переводом ключа в третье положение (вперед) При переводе ключа в третье положение включены: КЛ, КВ (двигатель подключен к сети и начинается разгон с полностью введенными пусковыми сопротивлениями). Включается КУП, поле нарастает до номинального значения. Включается КМТ, ЭМТ – двигатель растормаживается. Включаются РУ2 и РУ3 от броска тока, включается РДВ и встает на самоблокировку, включается КЭ, отключается РУ1 (отсчет уставки), идет разгон по ИХ1 (см. рисунок 2.50). В момент времени t = tуРУ1 включается КУ1, двигатель выходит на ИМХ2; в момент времени t = tуРУ1+tуРУ2, двигатель выходит на ИМХ3; в момент времени t = tуРУ1+tуРУ2+tуРУ3, двигатель выходит на ЕХ. При выходе двигателя на ЕХ включается реле РКУ и размыкает свой контакт в цепи КУП, дальнейшее управление поля будет осуществляться через РУП, разгон будет продолжаться в функции тока, момент снижается, т.к. поле двигателя ослабляется. Процесс пуска заканчивается, когда поле двигателя выйдет на уровень, определенный реостатом R5. Торможение КУ в положении “0” Якорь двигателя отключается от шин питания. При отключении КЛ и КВ двигатель отключается от питающей сети, отключается КУ1, КУ2, КУ3, включается КДТ, R4 включается параллельно якорю. Одновременно идет усиление поля в функции от тока (с помощью РУП), отключается РКУ (в нем начинается отсчет уставки, по истечении которой, контактор управления полем включается постоянно и поле будет полным). Помимо электродинамического торможения идет механическое торможение, т.к. КМТ и ЭМТ обесточены.
При напряжении на якоре двигателя примерно равном нулю отключается РДВ, что вызовет отключение КДТ. Торможение в целом идет в функции скорости (косвенно по напряжению РДВ, РДН) (см. рисунок 2.51).
Реверс Реверс состоит из двух этапов: торможения с предыдущего направления и разгона в противоположное. Для исключения наложения этих режимов в схеме предусмотрена внутренняя технологическая блокировка с помощью РДВ и РДН. В схеме предусмотрены следующие защиты: 1) Максимальная токовая защита (РМ1, РМ2, ПР1, ПР2 – в цепи двигателя, ПР3, ПР4 – в цепи управления); 2) Минимальная токовая защита (РОП); 3) Нулевая защита (РН); 4) Защита от перенапряжения (R7 и диод). В схеме предусмотрены следующие блокировки: 1) Механическая блокировка реверсивных контакторов КВ и КН (исключает их одновременное включение); 2) Путевая блокировка с помощью конечных выключателей ВКВ и ВКН; 3) Внутренняя технологическая блокировка с помощью реле РДВ и РДН.
Станция управления ПУ65-20 Станция управления ПУ65-20 предназначена для управления АД с фазным ротором средней и большой мощности, работающего в напряженном (повторно-кратковременном, до 1200 вкл/час) режиме (поэтому цепь управления на постоянном токе). Схема станции управления имеет три положения вперед и назад, и обеспечевает двухступенчатый пуск двигателя до ЕХ в функции времени, останов при динамическом торможении в функции времени в две ступени, реверс с торможением противовключением в функции скорости и последовательным разгоном в другую сторону в две ступени в функции времени. На рисунке 2.52 приняты обозначения: РП, КП – реле и контактор противовключения; РБ – реле блокировочное (для обеспечения прерывание режима динамического торможения и повторного пуска в том же направлении). Установившийся режим: ключ управления в положении “1”, двигатель находится на ИХ1 с сопротивлением (R1+R2+R3); ключ управления в положении “2”, двигатель находится на ИХ2 с сопротивлением (R2+R3); ключ управления в положении “3”, включается КУ1 и КУ2 – двигатель выходит на ЕХ.
Пуск в две ступени в функции времени Исходное состояние: включены РУ1, РУ2 и, если КУ в положении “0”, то включается РН. Ключ управления в положении “3”: включается КВ и КЛ, статор подключается к питающей сети, включаются РДТ и КМТ – двигатель растормаживается. Т.к. напряжение приложенное к катушке реле противовключения недостаточно для её включения, контактор КП замкнут – шунтируется R1 и двигатель разгоняется по ИХ2, и одновременно происходит отсчет уставки РУ2 (t = tу1+tу2), по истечении которой включается КУ2 – зашунтируются все сопротивления и двигатель выйдет на ЕХ (см. рисунок 2.53). Останов двигателя Ключ управления в положении “0” – двигатель перейдет в режим динамического торможения (две ступени в функции времени): в первый момент времени отключается КВ и КЛ, статор отключается от питающей сети, отключается КМТ и накладывается механический тормоз. Отключается РДТ и начинается отсчет уставки контакта РДТ. Отключается КП, КУ1 и КУ2, что вызывает ввод в ротор полного сопротивления и включение РУ1, РУ2. Включается КДТ, главные контакты которого включают статор на постоянный ток, а блок-контакты вклбчают контактор КП. Последнее вызывает шунтирование R1 и начало отсчета уставки РУ1. Динамическое торможение начинается на ИХдт (см. рисунок 2.54) с сопротивлением (R2+R3), которые будут выведены в функции времени, в результате включения КУ1 и КУ2. Отключение КДТ должно произойти после останова двигателя, т.е. tуРДТ > tдт. Режим прерывания динамического торможения и пуск в том же направлении Для реализации этого режима в схему введено блокировочное реле РБ. В первый момент времени приложенное к КВ и РБ напряжение вызовет включение РБ (т.к. сопротивление РБ гораздо больше сопротивления КВ), которое отключит катушку КДТ, главные контакты которого отключат статор от постоянного тока, а блок-контакты отключат катушки КП, КУ1 и КУ2. При этом прекращается режим динамического торможения и вводится полное сопротивление в цепь ротора. Замкнувшийся контакт КДТ вызовет включение контактора КВ и шунтирование РБ. Чтобы контактор КДТ вновь не включился его отключенное состояние подтверждается разомкнувшимся контактом КВ. После включения КВ включается КЛ, КП, КМТ и начинается разгон в прежнем направлении в облегченном режиме (т.к. скорость на валу
не равна нулю).
Реверс При переводе КУ в противоположное направление отключается КВ и включается КН, что вызовет изменение чередования фаз статора. Напряжение на кольцах ротора будет достаточным, что бы включилось РП, поэтому цепь контакторов КП, КУ1, КУ2 будет отключена разомкнувшимся контактом РП. В цепи ротора будет полное сопротивление и начнется режим торможения противовключением. При скорости близкой нулю РП отключится, что вызовет включение КП и шунтирование ступени противовключения. При этом будет продолжаться торможение противовключением, а при W=0 начнется разгон двигателя в противоположном направлении в функции времени (см. рисунок 2.55).
Торможение противовключением осуществляется в функции скорости, которая контролируется косвенно по напряжению на роторе с помощью реле противовключения РП. В схеме предусмотрены следующие защиты: 1) Максимальная токовая защита (РМ1¸РМ4, ПР1, ПР2); 2) Нулевая защита (РН). В схеме предусмотрены следующие блокировки: 1) Механическая блокировка реверсивных контактов КВ и КН; 2) Путевая блокировка с помощью конечных выключателей ВКВ и ВКН; 3) Внутренняя технологическая блокировка с помощью реле РБ. Общим недостатком всех разомкнутых систем является отсутствие достоверной информации о регулируемой величине, жесткость механических характеристик не лучше, чем на естественной характеристике. Все современные системы с управляемыми преобразователями работают по замкнутой структуре.   Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

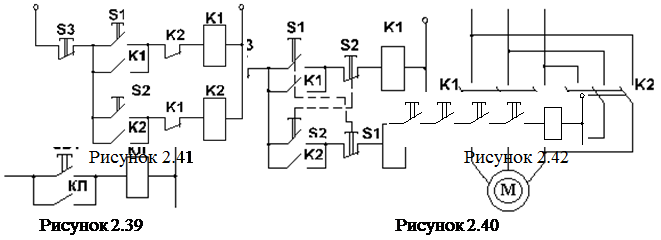
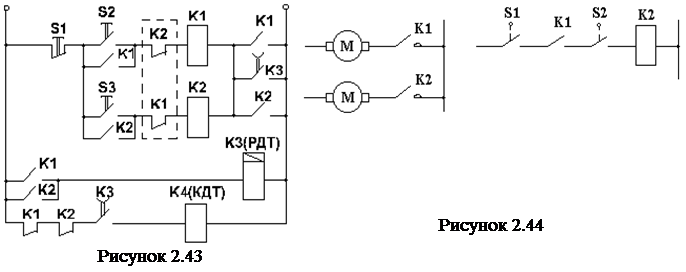

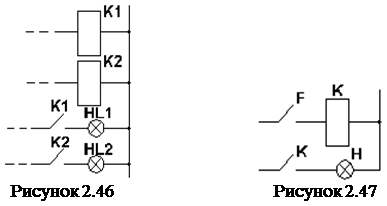


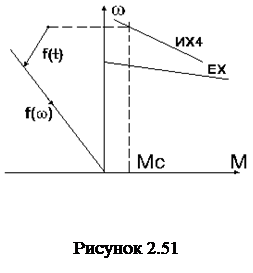

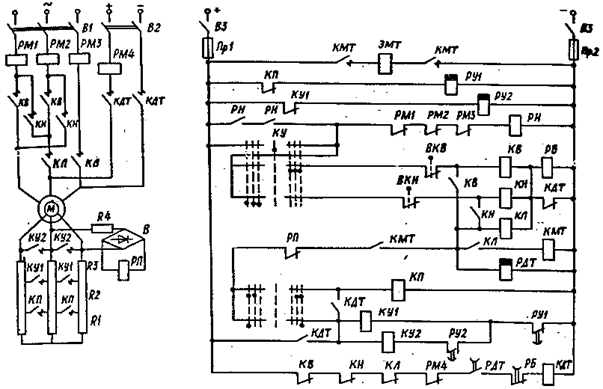

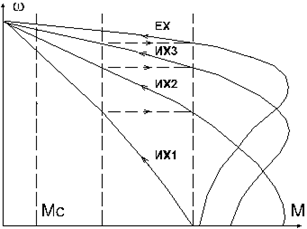 Рисунок 2.53
Рисунок 2.53
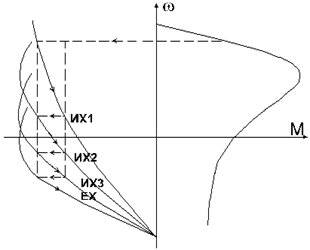 Рисунок 2.55
Рисунок 2.55