
|
|
Схемы включения ОУ с ограничением входного сигналаОграничение выходного сигнала используется для ограничения величины задающего входного сигнала на внутреннем контуре регулирования в системах с подчиненным регулированием параметров.
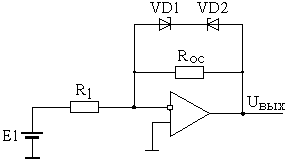
1) Схемы включения с нерегулируемым ограничением входного сигнала В соответствии с рисунком 3.56, ограничение осуществляется за счет введения нелинейных элементов в цепь обратной связи ОУ.
–(UCT VD2 + DUVD1) £ Uвых £ UCT VD1 + DUVD2, где Uст – напряжение стабилизации; DUVD – падение напряжения на диоде (DUVD»1В).
2) Схема включения с регулируемым ограничением выходного сигнала Принцип классического ограничения состоит в том, что для ограничения выходного сигнала на заданном уровне на вход ОУ следует подавать сигнал в противофазе с задающим.
При любом сигнале на выходе за счет подачи напряжения смещения с потенциометров R2, R3 на выходе компараторов А2 и А3 будут действовать напряжения обратные для диодов VD2, VD3 (см. рисунок 3.57а). Следовательно, они закрыты и на вход ничего не подается. Как только сигнал Uвых стал превышать уровень ограничения на выходе А2 и А3 будут действовать напряжения по проводимости диода VD2 или VD3, благодаря чему на вход ОУ (А1) будет подано напряжение в противофазе с входным. На рисунке 3.57б применены операционные усилители типа К553УД2А, К153УД2А.
Ограничение Uвых за счет придания схеме с ОУ мягких внешних характеристик и это достигается путем введения в цепь R2 (см. рисунок 3.57в). На нем гасится тот излишек напряжения, на который выходной сигнал ОУ превышает заданный уровень выходного.
В соответствии с рисунком 3.57г, в исходном состоянии, пока схема не достигла исходного ограничения, на выходе А2 действует ÅU, превышающее по уровню выходной сигнал, следовательно VD3 закрыт. Когда выходной сигнал приблизится к уровню ограничения, установленному на R3, диод VD3 включается и фиксирует уровень выходного сигнала на уровне сигнала ограничения.
В схеме (см. рисунок 3.57д) ОУ в режиме ограничения выходит в насыщение, а с помощью R2 устанавливается желаемый уровень выходного напряжения, который представляется частью этого напряжения насыщения.
Iвых ОУ = (3¸5)мА. При R2 >> Roc где
Схемы включения ОУ с частотно-зависимым преобразованием сигнала
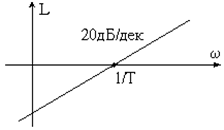
П-регулятор В соответствии с рисунком 3.58а, передаточная функция П-регулятора
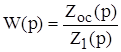
При анализе частотных свойств и синтезе схемы в 1-ю очередь нас интересует передаточная функция регулятора по каналу датчика обратной связи (ДОС) W(р), и только во 2-ю – по каналу задания Wрег(р). На рисунке 3.58а приведены обозначения: UДОС – напряжение датчика ОС; UЗ – напряжение задания. Zoc = Roc, Zвх = R1 (R2); W(p) = – k1 (k2), где k1 = Roc/R1, k2 = Roc/R2. Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.58б, в, соответственно. При k = 10 20×lg k = 20.
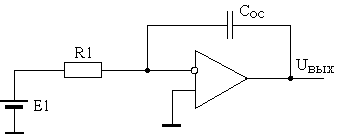
И-регулятор В соответствии с рисунком 3.59а, передаточная функция И-регулятора
где
где Ти = CocR1, wCp = 1/Ти. Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.59б, в, соответственно. Физический смысл постоянной времени Ти состоит в том, что она численно равна времени, за которое выходной сигнал достигает уровня входного при нулевых начальных условиях. И-регулятор и любой другой, имеющий интегрирующую часть, обладает свойством памяти (т.е. при нулевом входном сигнале выходной сохраняет накопленное к этому моменту значение).
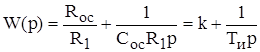
ПИ-регулятор В соответствии с рисунком 3.60а, передаточная функция ПИ-регулятора
Zoc = Roc + 1/Coc p, Zвх = R1. В зависимости от соединения ПИ-регулятор можно представить как параллельное (рисунок 3.60б), так и последовательное (рисунок 3.60в) соединение П- и И- звеньев. Так, параллельное соединение удобно для временных зависимостей.
Последовательное соединение удобно для анализа частотных свойств, т.к. lg xy = lg x + lg y.
где Тиз = Roc×Coc – изодромная постоянная времени; Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.60г, д, соответственно. НЧ: если Тиз×w<1, то w< 1/Тиз; ВЧ: если Тиз×w>1, то w>1/Тиз.
А-регулятор В соответствии с рисунком 3.61а, передаточная функция А-регулятора
ZВХ (р) = R1;
где Тф = RocCoc. Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.61б, в, соответственно. НЧ: Тф×w<1.
Д-регулятор В соответствии с рисунком 3.62а, передаточная функция Д-регулятора Zoc = Roc; Zвх = 1/C1p;
Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.62б, в, соответственно.
Датчики Датчики относятся к информационной части ЭП. От точности датчиков зависит точность замкнутых систем. Требования, предъявляемые к датчикам: - не должны вносить искажения в измеряемую цепь; - определяемая точность; - должны осуществлять преобразования измеряемого сигнала в электрическую форму (U, I).
Датчики постоянного тока
Шунт Шунт – самый распространенный датчик постоянного тока (комбинированное термостабилизированное сопротивление). Графическое изображение шунта представлено на рисунке 3.63а, где RS – его условное обозначение. В соответствии с рисунком 3.63б, передаточная функция шунта
Вольт-амперная характеристика (ВАХ) шунта представлена на рисунке 3.63в. UШН = 75мВ; IШН – от 1А до 7,5кА. Частотная характеристика (ЛАЧХ) представлена на рисунке 3.63г. Достоинства данного вида датчика тока: - простота; - точность. Недостатки: - низкий уровень выходного сигнала;
- гальваническая связь с силовой схемой.
  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 а)
а)

 б)
б)

 в)
Рисунок 3.56
в)
Рисунок 3.56
 ;
;
 а)
а)

 б)
б)

 в)
в)

 г)
г)

 д)
Рисунок 3.57
д)
Рисунок 3.57
 ,
, .
. .
. .
. а)
а)

 б) в)
Рисунок 3.58
б) в)
Рисунок 3.58
 ,
, , Z1 = R1.
, Z1 = R1. ,
, а)
а)

 б) в)
Рисунок 3.59
б) в)
Рисунок 3.59
 ;
; .
. ,
, а)
а)
 б) в)
б) в)

 г) д)
Рисунок 3.60
г) д)
Рисунок 3.60
 ;
; ,
, а)
а)

 б) в)
Рисунок 3.61
б) в)
Рисунок 3.61
 .
. а)
а)
 б) в)
Рисунок 3.62
б) в)
Рисунок 3.62
 .
.
 а) б)
а) б)

 в) г)
Рисунок 3.63
в) г)
Рисунок 3.63