
|
|
Динамические системы и методы их математическогоСтр 1 из 4Следующая ⇒ Лабораторная работа 3 Динамические системы и методы их математического Моделирования в пакете Matlab Simulink Цель работы: Разработка аналитических моделей для определения поведения динамических систем, описываемых обыкновенными дифференциальными уравнениями n-го порядка с постоянными коэффициентами, реализация этих моделей с помощью пакета Simulink.
Лабораторные работы Лабораторная работа 3.1.1. Моделирование входных сигналов динамических Систем Задание. Сформировать и визуализировать сигналы заданной формы (см. табл.3.1). Порядок выполнения работы
Отчет должен содержать: - исходные данные для моделирования; - Simulink - модель; - график сигнала.
Таблица 3.1
Лабораторная работа 3.1.2. Моделирование временного отклика Динамических систем Цель работы. Приобретение практических навыков, необходимых при исследовании переходных процессов, вызванных ступенчатым воздействием в динамических системах. Задание. Модель динамической системы описывается дифференциальным уравнением
Порядок выполнения работы
Отчет должен содержать: - исходные данные для моделирования; - Simulink - модель; - графики h (t) и w (t).
Таблица 3.2 Варианты параметров модели
Отчет должен содержать: - исходные данные для моделирования; - Simulink - модель; - графики переходной и весовой функции.
Лабораторная работа 3.1.3. Моделирование частотного отклика Динамических систем Цель работы. Изучение частотных характеристик типовых динамических звеньев первого и второго порядка. Задание. Передаточная функция колебательного звена 2 порядка описывается уравнением
а) Построить в Simulink модель для исследования колебательного звена с заданными параметрами б) Исследовать влияние заданного параметра (k, T или
Отчет должен содержать: - исходные данные для моделирования; - Simulink - модель; - фазовый портрет.
Таблица 3.3
Лабораторная работа 3.1.4. Анализ динамических свойств на основе Дифференциальной модели Задание. В соответствии с вариантом задания определить реакцию динамической системы, описываемой дифференциальным уравнением (таб. 3.2) при внешнем воздействии заданном в таб.3.1. Отчет должен содержать: - исходные данные для моделирования; - Simulink - модель; - графикиЛАЧХ и ЛФЧХ.
Примеры выполнения лабораторных работ При структурном моделировании в пакете Simulink необходимо составить схему моделирования. На ней изображаются блоки (усилители, сумматоры, интеграторы и т.д.) и связи между ними. При проведении моделирования эта схема набирается на экране дисплея с помощью мыши или клавиатуры. По своему смыслу этот процесс аналогичен вводу программы, однако он более прост и нагляден. Подробная информация о реализации таких схем в Simulink имеется в разделе 3.3.
Пример 1. Моделирование входных сигналов динамических систем Постановка задачи. Построить модель сигнала вида
на интервале [0; 2] и отобразить его на виртуальном осциллографе.
Решение. Структурная схема моделирования сигнала приведена на рис.3.1. Сигнал Для сигнала Результаты работы выведены на экран осциллографа Skope (библиотека Sinks).
Рис.3.1. Схема моделирования сигнала
Рис.3.2. Параметры блока Sine Wave
Рис.3.3. Сигнал на экране виртуального осциллографа
Постановка задачи Определить временные характеристики звена (переходную и весовую характеристики) на примере колебательного звена второго порядка
Решение.
Для построения схемы моделирования воспользуемся методом понижения производной (методом Кельвина). В нем можно выделить следующие этапы.
Создаем окно новой модели File→New→Model.
Рис.3.4. Схема моделирования для снятия временных характеристик
Для сбора модели используются следующие блоки библиотеки Simulink: Ø ступенчатая функция – библиотека Sources → Step; Ø линейные преобразователи – библиотека Commonly Used Bloks → Gain; Ø интеграторы – библиотека Continuous → Integrator; Ø сумматор – библиотека → Commonly Used Bloks → Sum; Ø виртуальные осциллографы – библиотека Sinks → Skope; Ø производная - библиотека Continuous → Derivative. Параметры ступенчатого входного сигнала задаются в блоке Step (рис.3.5). Для проведения расчетов амплитуду входного сигнала зададим равной единице.
Рис.3.5. Для расчета модели необходимо выбрать пункт меню Simulation/Start или инструмент Для просмотра результатов моделирования нужно дважды щелкнуть левой кнопкой мыши по блоку Scope. При необходимости можно увеличить время расчета Stop time, с 10 с. По умолчанию, до, например, 100 с. Этот параметр задается в окне Simulation/Configuration Parameters. Время расчета задается указанием начального (Start time) и конечного (Stop time) значений времени расчета. Начальное время, как правило, задается равным нулю. Величина конечного времени задается пользователем исходя из условий решаемой задачи. После повтора расчета результат выглядит, как показано на рис.3.6.
Рис.3.6. Переходная и весовая характеристики соответственно Постановка задачи Построить ЛАЧХ (линейную амплитудно-частотную характеристику) и ЛФЧХ (линейную фазово-частотную характеристику) звена, заданного с помощью передаточной функции
Решение (Вариант 1)
Схема для снятия частотных характеристик в системе Simulink изображена на рис.3.7.
Рис.3.7. Первый вариант схемы моделирования для снятия частотных характеристик
Для сбора модели используются следующие блоки библиотеки Simulink: Ø синусоидальный сигнал – библиотека Sources → Sine Wave; Ø динамическое звено – библиотека Continuous → Transfer Fcn; Ø мультиплексор – библиотека Commonly Used Bloks→Mux; Ø виртуальные осциллографы – библиотека Sinks → Skope.
Параметры входного гармонического сигнала: амплитуда - задаются в блоке Sine Wave. Для расчетов амплитуду входного сигнала задаем равной единице. Блок Mux предназначен для одновременного наблюдения на осциллографе входного и выходного сигналов. Результат моделирования при
Рис. 3.8. Входной сигнал (розовая линия) и отклик системы (желтая линия)
На экране виртуального осциллографа в общем случае будет наблюдаться изображение (рис.3.9)
Рис.3.9 Решение (Вариант 2) Для получения динамических характеристик системы (рис.3.8) можно воспользоваться функциями Linear Analysis пакета расширения Control System Toolbox. Для этого необходимо выставить метку Input Point щелкнув правой кнопкой мыши по стрелке перед блоком Transfer Fcn и набрать Linearization Points / Input Point. Аналогично выставляется метка Output Point (рис.3.10).
Рис.3.10. Второй вариант схемы моделирования для снятия частотных характеристик
Далее, набрав команду Tools / Control Design / Linear Analysis, открывается окно Control and Estimation Tools Manager
Рис. 3.11 Здесь обозначены расставленные на модели точки. Здесь можно поменять входы и выходы, а также деактивировать некоторые точки. Далее нажимаем на кнопку Linearize Model и получаем окно с графическим отображением динамических характеристик (рис.3.12).
Рис.3.12 Переходной процесс
Для переключения между графиками нужно щелкнуть правой кнопкой мыши по графику и выбрать из подменю Plot Types/«необходимый график». Здесь « необходимый график » - одина из диграмм:
На рис.3.13 - 3.14 в качестве примера изображены диаграммы Найквиста и Боде. Диаграмма Найквиста строится в системе координат: по оси абсцисс откладывается действительная часть передаточной функции при
Рис.3.13. Фазовый портрет – диаграмма Найквиста
Рис.3.14. Частотная характеристика – диаграмма Боде
Дифференциальной модели Постановка задачи Исследовать математическую систему, показанную на рис. 3.1
Рис. 3.15. Модель системы подрессоривания:
и исследовать ее при заданных числовых значениях параметров
Здесь Решение Система описывается дифференциальным уравнением второго порядка
Преобразуем уравнение к виду, необходимому для моделирования в среде Matlab Simulink
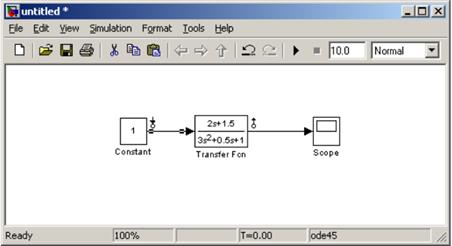
Схема для решения дифференциального уравнения представлена на рис. 3.2. Построение модели начинаем с сумматора. К выходу сумматора подключается линейный преобразователь (множитель 1/m), на выходе которого получаем значение второй производной. Далее подключаем два интегратора, на выходе которых получаем значение первой производной и самой функции. Далее устанавливаем связи между входами и выходами соответствующих блоков, применяя, где необходимо, дополнительные преобразователи и сумматоры). Для вычисления производной кинематического воздействия используется блок дифференцирования.
Рис.3.16. Схема Matlab Simulink для решения уравнения (3.2)
Общие сведения Система Simulink является составной частью системы MATLAB, предназначенной для структурно-графического моделирования различных динамических объектов, как непрерывных, так и дискретных. В данном методе объект представляется в виде совокупности готовых, законченных блоков, между которыми устанавливаются связи по типу «вход-выход». В графике модели такие связи изображаются простыми стрелками. Пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. Это чрезвычайно упрощает процесс моделирования, делает его высокоэффективным. Для запуска программы необходимо предварительно запустить пакет MATLAB. Основное окно пакета MATLAB показано на рис.3.17. Там же показана подсказка появляющаяся в окне при наведении указателя мыши на ярлык Simulink в панели инструментов.
Рис 3.17. Основное окно программы MATLAB
После открытия основного окна программы MATLAB нужно запустить программу Simulink. Это можно сделать одним из трех способов:
MATLAB.
файл). Последний вариант удобно использовать для запуска уже готовой и отлаженной модели, когда требуется лишь провести расчеты и не нужно добавлять новые блоки в модель. Использование первого и второго способов приводит к открытию окна браузера разделов библиотеки Simulink (рис. 3.18).
Рис. 3.18. Окно браузера (обозревателя) библиотеки Simulink
Создание S-модели
Для создания модели в среде SIMULINK необходимо последовательно выполнить ряд действий: 1. Создать новый файл модели с помощью команды File/New/Model, или используя кнопку на панели инструментов (здесь и далее, с помощью символа «/», указаны пункты меню программы, которые необходимо последовательно выбрать для выполнения указанного действия). Вновь созданное окно модели показано на рис. 3.21.
Рис 3.21. Пустое окно модели
2. Расположить блоки в окне модели. Для этого необходимо открыть соответствующий раздел библиотеки (Например, Sources - Источники). Далее, указав курсором на требуемый блок и нажав на левую клавишу «мыши» - «перетащить» блок в созданное окно. Клавишу мыши нужно держать нажатой. На рис.3.22 показано окно модели, содержащее блоки.
Рис.3.22. Окно модели, содержащее блоки
Для удаления блока необходимо выбрать блок (указать курсором на его изображение и нажать левую клавишу «мыши»), а затем нажать клавишу Delete на клавиатуре. Для изменения размеров блока требуется выбрать блок, установить курсор в один из углов блока и, нажав левую клавишу «мыши», изменить размер блока (курсор при этом превратится в двухстороннюю стрелку). Simulink позволяет поворачивать блоки на 90° по часовой стрелке и на 180° градусов с целью обеспечения требуемого направления прохождения сигналов через них сверху вниз, снизу вверх, справа налево, например, в случае расположения блоков в цепях обратной связи. Чтобы повернуть блок необходимо: выделить поворачиваемый блок, выбрать команду Flip Block из меню Format, чтобы повернуть блок на 180° градусов или выбрать команду Rotate Block, чтобы повернуть блок на 90° градусов по часовой стрелке.
3. Каждый из установленных в схему блоков имеет параметры «по умолчанию», которые можно изменить через диалоговое окно, вызываемое двойным щелчком мыши по соответствующему блоку. При задании численных параметров следует иметь в виду, что в качестве десятичного разделителя должна использоваться точка, а не запятая. После внесения изменений нужно закрыть окно кнопкой OK. На рис.3.23 в качестве примера показаны блок, моделирующий передаточную функцию и окно редактирования параметров данного блока.
Рис.3.23. Блок, моделирующий передаточную функцию и окно редактирования параметров блока
4. После установки на схеме всех блоков из требуемых библиотек нужно выполнить соединение элементов схемы. Входные и выходные порты на пиктограммах блоков отмечены значком «>». Для соединения блоков необходимо указать курсором на «выход» блока, а затем, нажать и, не отпуская левую клавишу «мыши», провести линию к входу другого блока. После чего отпустить клавишу. В случае правильного соединения изображение стрелки на входе блока изменяет цвет. Для создания точки разветвления в соединительной линии нужно подвести курсор к предполагаемому узлу и, нажав правую клавишу “мыши”, протянуть линию. Для удаления линии требуется выбрать линию (так же, как это выполняется для блока), а затем нажать клавишу Delete на клавиатуре. Схема модели, в которой выполнены соединения между блоками, показана на рис.3.24.
Рис.3.24. Схема модели
5. После составления расчетной схемы необходимо сохранить ее в виде файла на диске, выбрав пункт меню File/Save As... в окне схемы и указав папку и имя файла. Следует иметь в виду, что имя файла не должно превышать 32 символов, должно начинаться с буквы и не может содержать символы кириллицы и спецсимволы. Это же требование относится и к пути файла (к тем папкам, в которых сохраняется файл). При последующем редактировании схемы можно пользоваться пунктом меню Fille/Save. При повторных запусках программы SIMULINK загрузка схемы осуществляется с помощью меню File/Open... в окне обозревателя библиотеки или из основного окна MATLAB.
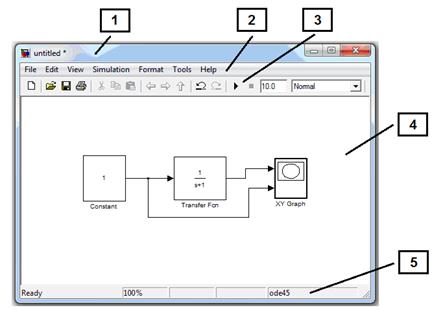
Окно модели Окно модели содержит следующие элементы (см. рис.3.24):
1. Заголовок, с названием окна. Вновь созданному окну присваивается имя Untitled с соответствующим номером. 2. Меню с командами File, Edit, View и т.д. 3. Панель инструментов. 4. Окно для создания схемы модели. 5. Строка состояния, содержащая информацию о текущем состоянии модели.
Меню окна содержит команды для редактирования модели, ее настройки и управления процессом расчета, работы файлами и т.п.:
и управление процессом расчета.
модели в целом.
средств для работы с моделью (отладчик, линейный анализ и т.п.)
Полный список команд меню окна модели приведен в Приложении 2. Для работы с моделью можно также использовать кнопки на панели инструментов (рис.3.25).
Рис. 3.25. Панель инструментов окна модели
Кнопки панели инструментов имеют следующее назначение:
1. New Model - Открыть новое (пустое) окно модели. 2. Open Model - Открыть существующий mdl-файл. 3. Save Model - Сохранить mdl-файл на диске. 4. Print Model - Вывод на печать блок-диаграммы модели. 5. Cut - Вырезать выделенную часть модели в буфер промежуточного хранения. 6. Copy - Скопировать выделенную часть модели в буфер промежуточного хранения. 7. Paste - Вставить в окно модели содержимое буфера промежуточного хранения. 8. 9. 10. Go to parent system - Переход из подсистемы в систему высшего уровня иерархии (“родительсую систему”). Команда доступна только, если открыта подсистема. 11. Undo - Отменить предыдущую операцию редактирования. 12. Redo - Восстановить результат отмененной операции редактирования. 13. Start/Pause/Continue Simulation - Запуск модели на исполнение (команда Start); после запуска модели на изображении кнопки выводится символ, и ей соответствует уже команда Pause (Приостановить моделирование); для возобновления моделирования следует щелкнуть по той же кнопке, поскольку в режиме паузы ей соответствует команда Continue (Продолжить). 14. Stop - Закончить моделирование. Кнопка становится доступной после начала моделирования, а также после выполнения команды Pause. 14. Stop - Закончить моделирование. Кнопка становится доступной после начала моделирования, а также после выполнения команды Pause. 15. 16. Normal/Accelerator — Обычный/Ускоренный режим расчета. Инструмент доступен, если установлено приложение Simulink Performance Tool.
10. Library Browser - Открыть окно обозревателя библиотек. 11. Toggle Model Browser - Открыть окно обозревателя модели.
15. В нижней части окна модели находится строка состояния, в которой отображаются краткие комментарии к кнопкам панели инструментов, а также к пунктам меню, когда указатель мыши находится над соответствующим элементом интерфейса. Это же текстовое поле используется и для индикации состояния Simulink: Ready (Готов) или Running (Выполнение). В строке состояния отображаются также:
Установка параметров расчета и его выполнение. Перед выполнением расчетов необходимо предварительно задать параметры расчета. Задание параметров расчета выполняется в панели управления меню Simulation/Parameters. Вид панели управления приведен на рис.3.26.
Рис.3.26. Панель управления
Установка параметров модели
1. Simulation time (Интервал моделирования или время расчета). Время расчета задается указанием начального (Start time) и конечного (Stop time) значений времени расчета. Начальное время, как правило, задается равным нулю. Величина конечного времени задается пользователем исходя из условий решаемой задачи. 2. Solver options (Параметры расчета). При выборе параметров расчета необходимо указать способ моделирования (Type) и метод расчета нового состояния системы. Для параметра Type доступны два варианта - c фиксированным (Fixed-step) или с переменным (Variable-step) шагом. Как правило, Variable-step используется для моделирования непрерывных систем, a Fixed-step - для дискретных. Список методов расчета нового состояния системы содержит несколько вариантов. Первый вариант (discrete) используется для расчета дискретных систем. Остальные методы используются для расчета непрерывных систем. Эти методы различны для переменного (Variable-step) и для фиксированного (Fixed-step) шага времени, но, по сути, представляют собой процедуры решения систем дифференциальных уравнений. Подробное описание каждого из методов расчета состояний системы приведено во встроенной справочной системе MATLAB. Ниже двух раскрывающихся списков Type находится область, содержимое которой меняется зависимости от выбранного способа изменения модельного времени. При выборе Fixed-step в данной области появляется текстовое поле Fixed-step size (величина фиксированного шага) позволяющее указывать величину шага моделирования. Величина шага моделирования по умолчанию устанавливается системой автоматически (auto). Требуемая величина шага может быть введена вместо значения auto либо в форме числа, либо в виде вычисляемого выражения (то же самое относится и ко всем параметрам устанавливаемым системой автоматически). При выборе Fixed-step необходимо также задать режим расчета (Unconstrained). Для параметра Unconstrained доступны три варианта: MultiTasking (Многозадачный) – необходимо использовать, если в модели присутствуют параллельно работающие подсистемы, и результат работы модели зависит от временных параметров этих подсистем. Режим позволяет выявить несоответствие скорости и дискретности сигналов, пересылаемых блоками друг другу. SingleTasking (Однозадачный) - используется для тех моделей, в которых недостаточно строгая синхронизация работы отдельных составляющих не влияет на конечный результат моделирования. Auto (Автоматический выбор режима) - позволяет Simulink автоматически устанавливать режим MultiTasking для тех моделей, в которых используются блоки с различными скоростями передачи сигналов и режим SingleTasking для моделей, в которых содержатся блоки, оперирующие одинаковыми скоростями. При выборе Variable-step в области появляются поля для установки трех параметров: Мах step size - максимальный шаг расчета. По умолчанию он устанавливается автоматически (auto) и его значение в этом случае равно (SfopTime — StartTime)/50. Довольно часто это значение оказывается слишком большим, и наблюдаемые графики представляют собой ломаные (а не плавные) линии. В этом случае величину максимального шага расчета необходимо задавать явным образом. Мin step size - минимальный шаг расчета. Initial step size - начальное значение шага моделирования. При моделировании непрерывных систем с использованием переменного шага необходимо указать точность вычислений: относительную (Relative tolerance) и абсолютную (Absolute tolerance). По умолчанию они равны соответственно 10-3 и auto. 3. Output options (Параметры вывода) В нижней части вкладки Solver задаются настройки параметров вывода выходных сигналов моделируемой системы (Output options). Для данного параметра возможен выбор одного из трех вариантов: Refine output (Скорректированный вывод) – позволяет изменяь дискретность регистрации модельного времени и тех сигналов, которые сохраняются в рабочей области MATLAB с помощью блока То Workspace. Установка величины дискретности выполняется в строке редактирования Refine factor, расположенной справа. По умолчанию значение Refine factor равно 1, это означает, что регистрация производится с шагом D t = 1 (то есть для каждого значения модельного времени:). Если задать Refine factor равеным 2, это означает, что будет регистрироваться каждое второе значение сигналов, 3 - каждое третье т. д. Параметр Refine factor может принимать только целые положительные значения Produce additional output (Дополнительный вывод) — обеспечивает дополнительную регистрацию параметров модели в заданные моменты времени; их значения вводятся в строке редактирования (в этом случае она называется Output times) в виде списка, заключенного в квадратные скобки. При использовании этого варианта базовый шаг регистрации (D t) равен 1. Значения времени в списке Output times могут быть дробными числами и иметь любую точность. Produce specified output only (Формировать только заданный вывод)—устанавливает вывод параметров модели только в заданные моменты времени, которые указываются в поле Output times (Моменты времени вывода).
Выполнение расчета Запуск расчета выполняется с помощью выбора пункта меню Simulation/Start или инструмента   Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

























 . (3.1)
. (3.1)



 .
. . Исходные данные для моделирования приведены в табл.3.3.
. Исходные данные для моделирования приведены в табл.3.3. ) на вид частотных характеристик (bode, диаграмме Найквиста), рассмотреть следующие значения параметра: 10% от исходного, 50% от исходного, 100% от исходного.
) на вид частотных характеристик (bode, диаграмме Найквиста), рассмотреть следующие значения параметра: 10% от исходного, 50% от исходного, 100% от исходного.
 задан в параметрах блока Sine Wave (библиотека Sources).
задан в параметрах блока Sine Wave (библиотека Sources). используются два блока – блок линейного сигнала Ramp (библиотека Sources) и блок математических функций Fcn (библиотека User-Defined Functions), где была выбрана функция возведения в квадрат. Суммирование составляющих сигнала производится с помощью функции Sum (библиотека Commonly Used Blocks).
используются два блока – блок линейного сигнала Ramp (библиотека Sources) и блок математических функций Fcn (библиотека User-Defined Functions), где была выбрана функция возведения в квадрат. Суммирование составляющих сигнала производится с помощью функции Sum (библиотека Commonly Used Blocks).


 . (3.1)
. (3.1) . (3.2)
. (3.2) и y.
и y.  .
.

 на панели инструментов.
на панели инструментов.
 .
.
 и угловая частота
и угловая частота 
 представлен на рис.3.8.
представлен на рис.3.8.



 , по ординат – мнимая. Для получения годографа осуществляется изменение частоты от 0 до ∞.
, по ординат – мнимая. Для получения годографа осуществляется изменение частоты от 0 до ∞.

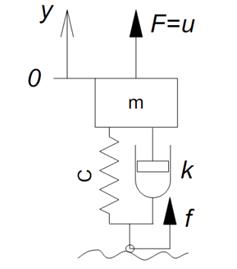
 - силовое воздействие;
- силовое воздействие; - кинематическое воздействие.
- кинематическое воздействие.
 и
и  - амплитуды кинематического и силового воздействий соответственно.
- амплитуды кинематического и силового воздействий соответственно. . (3.1)
. (3.1) . (3.2)
. (3.2)

 (Simulink) на панели инструментов командного окна
(Simulink) на панели инструментов командного окна





 на панели инструментов. Процесс расчета можно завершить досрочно, выбрав пункт меню Simulation/Stop или инструмент
на панели инструментов. Процесс расчета можно завершить досрочно, выбрав пункт меню Simulation/Stop или инструмент  . Расчет также можн
. Расчет также можн