
|
|
Пример 2. Моделирование временного отклика динамических системПостановка задачи Определить временные характеристики звена (переходную и весовую характеристики) на примере колебательного звена второго порядка
Решение.
Для построения схемы моделирования воспользуемся методом понижения производной (методом Кельвина). В нем можно выделить следующие этапы.
Создаем окно новой модели File→New→Model.
Рис.3.4. Схема моделирования для снятия временных характеристик
Для сбора модели используются следующие блоки библиотеки Simulink: Ø ступенчатая функция – библиотека Sources → Step; Ø линейные преобразователи – библиотека Commonly Used Bloks → Gain; Ø интеграторы – библиотека Continuous → Integrator; Ø сумматор – библиотека → Commonly Used Bloks → Sum; Ø виртуальные осциллографы – библиотека Sinks → Skope; Ø производная - библиотека Continuous → Derivative. Параметры ступенчатого входного сигнала задаются в блоке Step (рис.3.5). Для проведения расчетов амплитуду входного сигнала зададим равной единице.
Рис.3.5. Для расчета модели необходимо выбрать пункт меню Simulation/Start или инструмент Для просмотра результатов моделирования нужно дважды щелкнуть левой кнопкой мыши по блоку Scope. При необходимости можно увеличить время расчета Stop time, с 10 с. По умолчанию, до, например, 100 с. Этот параметр задается в окне Simulation/Configuration Parameters. Время расчета задается указанием начального (Start time) и конечного (Stop time) значений времени расчета. Начальное время, как правило, задается равным нулю. Величина конечного времени задается пользователем исходя из условий решаемой задачи. После повтора расчета результат выглядит, как показано на рис.3.6.
Рис.3.6. Переходная и весовая характеристики соответственно Пример 3. Моделирование частотного отклика динамических систем Постановка задачи Построить ЛАЧХ (линейную амплитудно-частотную характеристику) и ЛФЧХ (линейную фазово-частотную характеристику) звена, заданного с помощью передаточной функции
Решение (Вариант 1)
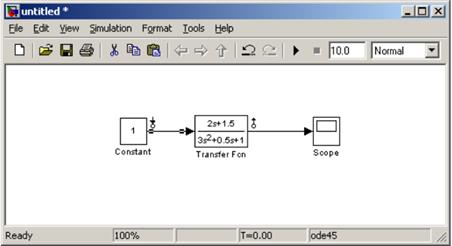
Схема для снятия частотных характеристик в системе Simulink изображена на рис.3.7.
Рис.3.7. Первый вариант схемы моделирования для снятия частотных характеристик
Для сбора модели используются следующие блоки библиотеки Simulink: Ø синусоидальный сигнал – библиотека Sources → Sine Wave; Ø динамическое звено – библиотека Continuous → Transfer Fcn; Ø мультиплексор – библиотека Commonly Used Bloks→Mux; Ø виртуальные осциллографы – библиотека Sinks → Skope.
Параметры входного гармонического сигнала: амплитуда - задаются в блоке Sine Wave. Для расчетов амплитуду входного сигнала задаем равной единице. Блок Mux предназначен для одновременного наблюдения на осциллографе входного и выходного сигналов. Результат моделирования при
Рис. 3.8. Входной сигнал (розовая линия) и отклик системы (желтая линия)
На экране виртуального осциллографа в общем случае будет наблюдаться изображение (рис.3.9)
Рис.3.9 Решение (Вариант 2) Для получения динамических характеристик системы (рис.3.8) можно воспользоваться функциями Linear Analysis пакета расширения Control System Toolbox. Для этого необходимо выставить метку Input Point щелкнув правой кнопкой мыши по стрелке перед блоком Transfer Fcn и набрать Linearization Points / Input Point. Аналогично выставляется метка Output Point (рис.3.10).
Рис.3.10. Второй вариант схемы моделирования для снятия частотных характеристик
Далее, набрав команду Tools / Control Design / Linear Analysis, открывается окно Control and Estimation Tools Manager
Рис. 3.11 Здесь обозначены расставленные на модели точки. Здесь можно поменять входы и выходы, а также деактивировать некоторые точки. Далее нажимаем на кнопку Linearize Model и получаем окно с графическим отображением динамических характеристик (рис.3.12).
Рис.3.12 Переходной процесс
Для переключения между графиками нужно щелкнуть правой кнопкой мыши по графику и выбрать из подменю Plot Types/«необходимый график». Здесь « необходимый график » - одина из диграмм:
На рис.3.13 - 3.14 в качестве примера изображены диаграммы Найквиста и Боде. Диаграмма Найквиста строится в системе координат: по оси абсцисс откладывается действительная часть передаточной функции при
Рис.3.13. Фазовый портрет – диаграмма Найквиста
Рис.3.14. Частотная характеристика – диаграмма Боде
  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 . (3.1)
. (3.1) . (3.2)
. (3.2) и y.
и y.  .
.

 на панели инструментов.
на панели инструментов.
 .
.
 и угловая частота
и угловая частота 
 представлен на рис.3.8.
представлен на рис.3.8.



 , по ординат – мнимая. Для получения годографа осуществляется изменение частоты от 0 до ∞.
, по ординат – мнимая. Для получения годографа осуществляется изменение частоты от 0 до ∞.
