|
|
Индуктивные, емкостные, пьезоэлектрическиеИндуктивные датчики. Принцип действия индуктивных датчиков основан на изменении индуктивности L или взаимоиндуктивности обмотки с сердечником вследствие изменения магнитного сопротивления R m магнитной цепи датчика, в которую входит сердечник. Индуктивные датчики относятся к классу параметрических. Измеряемое перемещение на входе датчика вызывает изменение параметров магнитной и электрической цепей. С помощью индуктивных датчиков можно контролировать механические перемещения, силы, температуру, свойства магнитных материалов и т. д. Рассмотрим работу однотактного индуктивного преобразователя (рис.1). Выходной сигнал получают в виде переменного напряжения, снимаемого с сопротивления нагрузки R н, включенного в цепь обмотки 2, помещенной на сердечнике. Под действием входного сигнала перемещается якорь 1 и изменяется зазор b. Выходное напряжение датчика определим из формулы:
U вых= IR н 1)
где: 1 – подвижная часть магнитопровода (якорь); 2 – магнитопровод с обмоткой; b – воздушный зазор. Рис.1. Схема однотактного индуктивного преобразователя
Среднее значение тока в рабочей цепи преобразователя
где R – суммарное активное сопротивление цепи, R=R н +R 0 2) R 0 – сопротивление обмотки, XL – реактивное сопротивление цепи; ω - круговая частота. Индуктивность обмотки L является функцией размера зазора с магнитным сопротивлением rδ.
Где: w – число витков обмотки;
S – площадь поперечного сечения зазора. Учитывая, что на практике для индуктивных преобразователей выполняется условия R << XL, и подставляя выражение 3 в 1, получим:
Коэффициент преобразования:
величина постоянная, поэтому статическая характеристика U вых = ƒ ( должна представлять собой прямую, проходящую через начало координат под углом α = arctgK к оси абсцисс (рис.2).
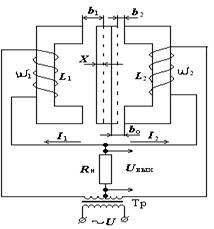
Рис. 2. Статическая характеристика однотактного, индуктивного преобразователя. Реальная характеристика преобразователя, показанная на рисунке сплошной линией, отличается от идеальной характеристики. Это объясняется тем, что при малых значениях b допущение R m<< Rδ становится неверным, так как магнитное сопротивление ферромагнитного участка магнитной цепи R m становится соизмеримым с магнитным сопротивлением зазора Rδ. При больших значениях b падает индуктивность обмотки L и реактивное сопротивление XL становится соизмеримым с активным сопротивлением магнитной цепи, т. е. R≈X L. Это несоблюдение принятых в начале рассмотрения допущений и приводит к искажению статической характеристики. Непосредственно для измерительных целей применяют двухтактные измерительные преобразователи, которые могут включаться по дифференциальной или мостовой схемам. Дифференциальная схема включения индуктивного измерительного датчика требует использования трансформатора со средней точкой (рис.3). Оба сердечника идентичны по своим конструктивным и магнитным характеристиками. Расположенные на них обмотки w 1 и w 2 имеют одинаковые параметры и включены последовательно и встречно. Сопротивление нагрузки Rн включается между средней точкой трансформатора и средней точкой обмоток преобразователя. В такой схеме ток I вых протекает по сопротивлению нагрузки, равен разности токов правой и левой половины схемы. I вых= I 1 +I 2 7) Выходное напряжение: Uвых=Rн(I 1 -I 2 ) 8).
Рис. 3. Схема дифференциального индуктивного преобразователя.
Изменение зазоров якоря на расстояние X приводит к изменению индуктивностей: увеличение зазора ведет к уменьшению индуктивности, а уменьшение зазора наоборот индуктивность увеличивается. Изменение индуктивностей плечей датчика приводит к дисбалансу токов I 1 и I 2 в результате через сопротивление нагрузки потечет ток и появится напряжение на выходе датчика. Если изменяется направление перемещения якоря, фаза выходного напряжения сдвигается на 180° относительно напряжения питания, являющегося опорным. Принцип действия мостовой схемы (рис.4,а) индуктивного датчика аналогичен принципу действия дифференциальной схемы. Путем несложных математических преобразований уравнения
Ůвых=R(İ 1 -İ 2 ) 9),
получим уравнение для определения выходного напряжения для мостовой схемы.
где: L1=L2=L 0, U вых=0 при δ 1= δ 2= δ 0 в исходном состоянии. Так как все параметры за исключением Х являются постоянными, то выражение (10) можно привести к виду, / Ů вых/= KX 11)
где: K = Таким образом, статическая характеристика двухтактного индуктивного измерительного преобразователя представляет собой функцию вида U вых= KX 1, Что соответствует прямой, проходящей через начало координат под углом α =arctg K рис. 4, б)
Рис. 4,а). Мостовая схема индуктивного б) статическая характеристика преобразователя. двухтактного индуктивного преобразователя. Емкостные датчики. Принцип действия емкостных измерительных преобразователей основан на изменении емкости конденсатора под воздействием входной преобразуемой величины. Емкость конденсатора C= Где: ε – относительная диэлектрическая проницаемость диэлектрика; ε 0 – диэлектрическая проницаемость вакуума; S – площадь пластины; δ – толщина диэлектрика или расстояние между пластинами. Из приведенного соотношения видно, что на емкость конденсатора влияет изменение площади перекрытия пластин S, расстояние между ними δ, диэлектрической проницаемости ε вещества, находящегося в зазоре между обкладками конденсатора (рис. 5). Емкостной преобразователь используются для измерения угловых и линейных перемещений, линейных размеров, уровня, усилий и т. д. Конструкции емкостных датчиков могут быть разнообразны: плоскопараллельными, цилиндрическими, с штыревыми электродами.
а) – площадь перекрытия б) – расстояние между в) – диэлектрической проницаемости пластин, пластинами, вещества в зазоре. Рис. 5. Схема и характеристики емкостных датчиков с различными изменяемыми параметрами. Емкостной плоскопараллельный измерительный преобразователь с изменяемой площадью перекрытия S (рис. 6) описывается уравнением преобразования (12). C= где: а – ширина пластин конденсатора; Х – длина перекрытия электродов.
Емкостной преобразователь для измерения угловых величин представлен на рис. 6. В этом случае емкость датчика определяем по формуле
а чувствительность
где: r 2 r 1 – соответственно наружный и внутренний радиусы пластин;
Рис. 6. Емкостной датчик для измерения угловых величин.
Из выражений 12 и 13 видно, что все входящие в них величины, кроме измеряемых Х или φ, постоянны. Статическая характеристика такого емкостного датчика линейна (см. рис. 5, а). Выше рассмотренные датчики относятся к датчикам параметрического типа. К ним можно отнести тензометрические датчики у которых под воздействием усилия изменяется его сопротивление, терморезисторы под действием температуры изменяется его сопротивление. Для терморезистивных датчиков используют материалы, обладающие высокой стабильностью ТКС, воспроизводимостью электрического сопротивления, стабильностью химических и физических свойств при нагревании. К таким материалам относятся платина, медь, никель, вольфрам и др. Сопротивление платиновых терморезисторов в диапазоне температур от 0 до 650°С описывается уравнением.
Где: R ϴ, R 0 – сопротивления датчика соответственно при рабочей и нулевой температурах; А и В – постоянные коэффициенты. Медные терморезисторы широко используют в диапазоне температур от 50 до 180°С и зависимость сопротивления меди от температуры описывается линейным уравнением.
Пьезоэлектрические датчики. Принцип действия пьезоэлектрических датчиков основан на использовании прямого или обратного пьезоэлектрического эффекта. Прямой пьезоэффект заключается в способности некоторых материалов образовывать электрических зарядов на поверхности при приложении механической нагрузки, обратный – в изменении механического напряжения или геометрических размеров образца материала под воздействием электрического поля. В качестве пьезоэлектриков используют обычно естественные материалы кварц и турмалин, а также искусственные созданные материалы. Количественно пьезоэффект оценивается пьезомодулем К d, устанавливающим зависимость между возникающим зарядом Q и прилаженной силой F: Q=K d F 15). Из пьезоматериалов наиболее распространен кварц. В качестве пьезоэлемента применяют пьезокерамику на основе ниобата свинца (НБС) и цирконата-титаната свинца (ЦТС). Все природные пьезоматериалы имеют кристаллическую структуру, которая определяет свойства пьезопреобразователей. Чувствительный элемент обычно вырезают из кристалла кварца в виде пластины (параллелепипеда), стороны которой параллельны осям кристалла (рис. 7, а).
а) б) Рис. 7. Пьезочувстлительный элемент (а) и пьезопреобразователь (б). Если пластину подвергнуть сжатию по оси Y, то на тех же гранях появятся заряды (поперечный пьезоэффект), а если приложить силу по оси Х, та не её гранях, перпендикулярно к оси Х, возникают заряды Q (продольный пьезоэффект). Значение зарядов не зависят от геометрических размеров пластин, а определяются лишь силой F. Значение заряда при поперечном пьезоэффекте определим по формуле: Q=–K d (b⁄a)F. 16). где: a, b – размеры пьезоэлемента соответственно в направлении осей X и Y. В зависимости от направления силы F (сжатие или растяжение) знаки зарядов на гранях пластины будут меняться. Пьезоэлектрический датчик давления представляет собой пластину пьезоматериала. На две её грани нанесены электроды, с которых снимается заряд или напряжение. Напряжение на обкладках датчика появляется под действием изменяющейся силы F и определим по формуле:
U 0= Q/C п 17). где: C п – емкость пьезоэлектрического элемента датчика, C п =εS х ⁄а - диэлектрическая постоянная материала пластины; S х= hb – площадь грани, перпендикулярной к оси Х, а – толщина пластины. Для увеличения сигнала, поступающего с датчика, часто пластины из пьезокерамики крмпануют в столбик (рис.7,б). Пьезопреобразователи могут работать не только на сжатие и растяжение, но на изгиб и сдвиг (рис. 8,а, б).
а) – работающие на изгиб; б) – работающие на сдвиг; 1 – кольцо; 2 – внешний электрод; 3 – внутренний электрод. Рис. 8. Пьезодатчики.
Для повышения чувствительности датчика изготовляют из n пластин, располагая их столбиком и соединяя параллельно (рис. 7, б). К достоинствам пьезодатчиков необходимо отнести простоту конструкции, малые размеры и стоимость, высокую надежность, возможность измерений быстропеременных величин, к недостаткам – невысокая чувствительность, непригодность к измерению статических величин. Пьезоэлектрические преобразователи относятся к датчикам генераторного типа. К этому классу можно отнести и термопары, у которых под действием температуры на выводах возникает ЭДС прямо пропорционально температуры. Термопара представляет собой чувствительный элемент, состоящий из двух разных проводников или полупроводников, соединенных электрически, и преобразующий контролируемую температуру в ЭДС. Чтобы получить достоверные результаты, необходимо один спай термопары, называемый рабочим, поместим в среду с температурой ϴ 1, подлежащей измерению, а температуру ϴ 0 других – нерабочих (холодных, свободных) спаев поддерживать постоянной. Уравнение преобразования будет иметь вид.
где: С=
ТермоЭДС в основном определяют по градуировочным таблицам или графикам, получаемым экспериментально, для различных материалов при температуре холодных спаев ϴ 0=0.Для измерения температуры в пределах от-200 до 2500°С выпускают стандартные термопреобразователи температуры (таб.2). Таб. 2.
Электромашинные преобразователи. Основные требование, предъявляемое к информационным электрическим машинам автоматических устройств - высокая точность преобразования электрических или механических входных величин (сигналов управления) соответственно в механические или электрические выходные величины, находящиеся в строго постоянной и вполне определенной функциональной зависимости от входной величины. Информационные машины весьма разнообразны как по устройству, принципу действия, роду тока, так и по функциям, которые они выполняют в схемах автоматики. Электромашинные преобразователи делятся на сельсины, поворотные трансформаторы, тахогенераторы. Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения, вращения вала в электрический сигнал (выходное напряжение). Основное требование, которое предъявляется к большинству тахогенераторов, линейность выходной характеристики, т. е. минимальное отклонение от прямой линии;
где: k,k 1 – постоянные величины; α – угол поворота. Тахогенераторы переменного тока могут быть асинхронными и синхронным, а постоянного тока могут быть с постоянными магнитами или с электромагнитным возбуждением (с обмоткой возбуждения). Тахогенераторы используют для следующих целей: измерение скорости вращения, шкала прибора отградуирована в об/мин; осуществление обратной связи по скорости в следящих системах; осуществление электрического дифференцирования:
U г= k 1 (dα/dt);
осуществление электрического интегрирования.
Наряду с линейностью выходной характеристики тахогенератор должен обладать следующими требованиями: - большая крутизна выходной характеристики k = U г / n,мв/(об/мин); - симметрия выходного напряжения: U г (+ n)= U г (- n); - минимальное значение нулевого напряжения U г при n = 0 (у тахогенератора переменного тока) и минимальная зона нечувствительности (у тахогенератора на постоянном токе); - малый момент инерции ротора и момент сопротивления; - малые габариты и надежность. Тахогенераторы, обеспечивающие обратную связь по скорости и демпферирования следящих систем, должны быть высокие требования к крутизне выходной характеристики и мощности выходного сигнала. Асинхронные тахогенераторы по своей конструкции не отличаются от двухфазных асинхронных исполнительных двигателей с полым немагнитным ротором. Они имеют на статоре две фазные обмотки, оси которых смещены на 90°. Одна из них В (рис. 9, а) подключена к сети (обмотка возбуждения), с другой обмотки Г снимается выходное напряжение тахогенератора. В зависимости от расположения обмоток различают три конструкции тахогенераторов: - с обмоткой на внешнем статоре; - с обмоткой на внутреннем статоре; - с одной обмоткой на внешнем статоре, а другая обмотка на внутреннем статоре (обычно ОВ). Полый ротор изготовляется (в точных тахогенераторах) из константана, специального манганина, бронзы и т. п. Рассмотрим физические процессы, протекающие в асинхронном тахогенераторе при n =0. При неподвижном роторе (n =0) ток обмотки возбуждения создает пульсирующий по оси dd магнитный поток Ф dc, который, пронизывает ротор, наводя в нем ЭДС (см. рис. 9, а). Ток ротора от ЭДС трансформации создает магнитный поток ротора Ф dR,направленный навстречу потоку возбуждения Ф dc и, компенсирующие друг друга.
а) контуры тока и магнитные потоки; б) зависимость нулевого напряжения от положения ротора. Рис. 9. К принципу действия асинхронного тахогенератора при n =0. В реальных тахогенераторах при n =0 на зажимах генераторной обмотке имеется остаточное напряжение причины возникновения, которого весьма разнообразны и оно нежелательно. Существует способы компенсации этого напряжения. Достоинство асинхронного тахогенератора: - бесконтактность; - малоинерционность; - большую надежность; - неплохую стабильность характеристик. Недостатки асинхронного тахогенератора: - практическая нелинейность выходной характеристики; - наличие фазовой погрешности; - наличие остаточного напряжения.
Синхронные тахогенераторы В настоящее время широкое распространение получили синхронные тахогенераторы, конструктивно представляющие собой однофазные синхронные генераторы малой мощности с ротором, имеющим явно выраженные полюса выполненными в виде постоянного магнита. При вращении ротора тахогенератора в обмотке его статора наводится ЭДС, амплитуда которого прямо пропорциональна частоте вращения n.
где: ƒ=pn/60 – частота генерируемой ЭДС; 𝓌 г – эффективное число витков обмотки статора; Ф – магнитный поток; k = 4,44(р𝓌 г /60)Ф – постоянный коэффициент (при Ф =const); p – число пар полюсов. Применение синхронных тахогенераторов в ряде схем затруднительно из за того что у них с изменением амплитуды и изменяется и частота выходного напряжения. Положительным качеством синхронных тахогенераторов является, при малых габаритах имеют большую выходную мощность.
Тахогенераторы постоянного тока – это небольшие генераторы постоянного тока чаще с возбуждением от постоянных магнитов, реже с независимым возбуждением (рис. 10). Выходное напряжение тахогенератора U г можно определить из выражения:
где: Запишем окончательное выражение для выходного напряжения:
где: Ф – магнитный поток якоря;
Если пренебречь падением напряжения на щеточном комплекте и при постоянном потоке и сопротивлениях якоря и нагрузки, то получим уравнение для выходного напряжения тахогенератора.
или. U г= kn. где: величина При перечисленных выше условиях крутизна k постоянна и выходная характеристика тахогенератора (рис. 10) имеет вид прямой линии.
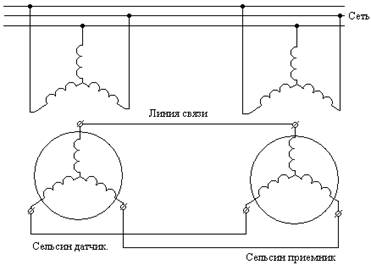
Рис. 10. Выходные характеристики 1, 2, 3, 4 тахогенератора. Наибольшая крутизна имеет место при холостом ходе тахогенератора, когда R н= ∞, кривая 1. Характеристика 2 при изменении сопротивления нагрузки. Прямая 3 учитывает влияние щеточного комплекта. За счет падения напряжения на щеточном контакте появляется зона нечувствительности от частот вращения n =0 до n = n min, при которых выходное напряжение тахогенератора равно нулю. Из-за размагничивающего действия реакции якоря магнитный поток с увеличением скорости уменьшается, что приводит к уменьшению крутизны выходной характеристики (характеристика 4). Сельсины применяются в технике для синхронизация вращения или поворота различных осей механизмов, находящиеся на значительном расстояние и не связанных между собой. Синхронной связью называется такая связь, которая обеспечивает одновременное вращение или поворот двух или нескольких механически несвязанный и находящихся на расстоянии друг от друга осей механизмов. Существует два основных вида систем синхронной связи: система электрического вала (синхронизация вращения) и система передачи угла (синхронизация поворота). Синхронизация синхронного вращения применяется, где требуется осуществить синхронное вращение двух или нескольких находящихся на расстоянии друг от друга осей механизмов, имеющих значительные моменты сопротивления. Системы синхронного поворота применяются для дистанционного управления, регулирования или контроля. Синхронный поворот осуществляется с помощью небольших индукционных электрических машин – однофазных или трехфазных сельсинов. Трехфазные сельсины конструктивно не отличаются от обычных асинхронных машин с фазным ротором. Простейшая трехфазная система синхронной связи представлена на (рис.11) и представляет собой соединение двух одинаковых сельсинов: приемника и датчика. Сельсины включаются в сеть переменного тока первичными обмотками (обычно обмотки статора). Концы соответствующих фаз вторичных обмоток обоих сельсинов соединяются друг с другом (обычно обмотки ротора) (рис. 11).
Рис. 11. Схема включения трехфазных сельсинов. Однофазные сельсины – это индукционные машины, которые имеют однофазную обмотку возбуждения и трехфазную обмотку синхронизации. В схемах автоматики применяют две системы синхронной передачи угла индикаторная и трансформаторная. Индикаторная система синхронного поворота применяются там, где момент сопротивления на ведомой оси мал или совсем отсутствует (стрелка или шкала). Трансформаторная система применяется, где на ведомой оси имеется значительный момент сопротивления. В трансформаторной системе сельсин отрабатывает заданный угол не самостоятельно, а с помощью механически и электрически связанного с ним исполнительного двигателя. Работа сельсинов в индикаторном режиме. Простейшая индикаторная система синхронной связи передачи угла состоит из двух одинаковых сельсинов и линии связи (рис. 12).
Рис. 12. Индикаторная система синхронной связи. Переменные токи I вд и I вп обмоток возбуждения сельсинов создают магнитные потоки Ф вди Ф вп, которые индуцируют в обмотках сельсинов электродвижущие силы. Значение ЭДС обмоток фаз зависит от их расположения относительно обмоток возбуждения. При равенстве углов α д =α п ЭДС наведенные в каждой фаз одинаковы и направлены встречно. Эти ЭДС уравновешивают друг друга, и ток в обмотках фаз отсутствует. Такое положение роторов сельсинов называется согласованным. При рассогласовании углов сельсинов (α д ≠α п сельсин датчик повернули на определенный угол) равенство ЭДС, индуцированных в одноименных обмотках фаз, нарушиться и вследствие чего появятся токи в фазах. Ротор сельсина приемника будет поворачиваться до тех пор пока токи обмоток фаз будут равны нулю. Точность работы сельсина приемника в индикаторном режиме характеризуется погрешностью Δϴ, которая определяется как полусумма максимального положительного ϴ max1 и максимального отрицательного ϴ max2 отклонений ротора приемника от согласованного с ротором датчика положения за один оборот: Δϴ=(ϴ max1– ϴ max2 )/2 Вращающиеся трансформаторы – это небольшие индукционные электрические машины, предназначенные для преобразования механического перемещения (угла поворота ротора α) в электрический сигнал – выходное напряжение U, амплитуда которого находится в определенной функциональной зависимости от угла поворота ротора.
  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 1)
1) =
=  =
=  3)
3) - магнитная проницаемость воздуха в зазоре;
- магнитная проницаемость воздуха в зазоре; 4)
4) ) 5)
) 5) 6)
6)
 X. 10).
X. 10). коэффициент преобразования индуктивного датчика.
коэффициент преобразования индуктивного датчика.
 11).
11).
 12),
12), 13),
13), 14),
14), - соответственно текущий (измеряемый) и начальный углы перекрытия пластин.
- соответственно текущий (измеряемый) и начальный углы перекрытия пластин.
 15)
15) 16).
16).



 - постоянная величина.
- постоянная величина.












 - ток в обмотке якоря;
- ток в обмотке якоря;  - сопротивление обмотке якоря.
- сопротивление обмотке якоря.
 - постоянная, определяемая конструкцией тахогенератора;
- постоянная, определяемая конструкцией тахогенератора;
 - падение напряжения на щеточном комплекте;
- падение напряжения на щеточном комплекте; 
 - сопротивление нагрузки.
- сопротивление нагрузки. ,
, есть крутизна выходной характеристики тахогенератора.
есть крутизна выходной характеристики тахогенератора.