|
|
Исполнительные элементы систем автоматикиИсполнительные элементы (ИЭ) систем автоматики предназначены для создания управляющего воздействия на регулирующий орган (РО) объекта управления (ОУ). Один из вариантов классификации исполнительных элементов САУ представлен на рис. 11.
Рис. 11. Один из вариантов классификации исполнительных элементов САУ. В зависимости от управляющего воздействия на выходе ИЭ делятся на два вида: силовые и параметрические. Если для изменения положения РО необходима сила или момент от исполнительного элемента, то такие ИЭ называют силовые. К ним можно отнести электромагниты, электромуфты и различные виды электродвигателей. Устройство, содержащее двигатель, редуктор и элементы управления двигателем, называют силовым приводом, или просто приводом. Еще одним вариантом ИЭ является следящий привод, который воспроизводит на выходе заданное перемещение, но с большим механическим усилием. Они чаще всего применяют в станках и манипуляторах с числовым программным управлением (ЧПУ). Особенно часто в качестве параметрических ИЭ используются электромагнитные реле, контакторы, тиристорные и транзисторные реле. Силовые ИЭ от характера движения можно разделить на три вида: линейные, угловые и вращательные. Основными требованиями, которым должны удовлетворять характеристики и параметры ИЭ, являются следующие: - максимальная сила или момент, развиваемый ИЭ, которые должны быть больше чем необходимо для перемещения РО; - высокое быстродействие; - максимальный КПД: - статическая характеристика должна быть близка к линейной: - минимальный порог чувствительности: - небольшая мощность управления ИЭ: - высокая надежность и долговечность: - небольшие размеры и масса.
Электромагниты (ЭМ) являются преобразователем электрического сигнала в механическое движение. ЭМ применяют в качестве приводных или управляющих устройств в ряде механизмов, электрических аппаратов и реле, подъемных и тормозных устройствах и т. д. По назначению электромагниты можно разделить: - удерживающие, которые служат для фиксации положения ферромагнитных тел (например, электромагниты, предназначенные для подъема предметов из ферромагнитного материала, электромагнитные плиты для удержания детали на металлообрабатывающих станках и др.); - приводные, которые служат для перемещений исполнительных устройств (например, клапанов, золотников, заслонок, в коробках передач металлообрабатывающих станках и др.); - специальные, которые используются в медицинской аппаратуре и др. По раду тока в обмотке различают ЭМ постоянного и переменного токов. В свою очередь ЭМ на постоянном токе делят на: - нейтральные, не реагирующие на полярность управляющего сигнала; - поляризованные, реагирующие на полярность сигнала. По конструктивному исполнению различают следующие типы ЭМ рис. 12. Клапанные – с внешним притягивающим якорем, при этом магнитные системы могут иметь различную форму (П-образный, Ш-образный, цилиндрический магнитопровод). Они производят небольшие перемещения (несколько миллиметров). Прямоходовые – с поступательным движением якоря. Они используются в виде соленоидов. Прямоходовые ЭМ имеют большой ход якоря.
1 – сердечник; 2 – ярмо; 3 – якорь; 4 – полюсный наконечник; 5 – катушка; 6 – направляющая трубка, δн – начальный воздушный зазор. Рис. 12. Нейтральные электромагниты.
ЭМ состоят из магнитопровода и собственно катушки. Магнитопровод. В ЭМ на постоянном токе магнитопровод выполнен сплошным из полосы или круглого материала – технически чистого железа марок Э, ЭА и ЭАА. Высокочувствительные ЭМ имеют магнитопровод из сплавов с высокой магнитной проницаемостью, например, 79НМ, 79НМА и гайперники марок 50НП, 45Н, 45НП. В быстродействующих ЭМ магнитопровод изготовляется из легированных сталей марок Э11, Э21, Э310 и т. д. Магнитопровод ЭМ на переменном токе выполняются шихтованными, т. е. собирают из пластин, штампуемых из листов толщиной 0,3÷0,5 мм. Материалом могут быть стали марок Э11, Э21, Э310 и т. д. Маломощные и небольшие ЭМ переменного тока иногда с целью экономии, магнитопровод изготавливают из сплошного материала толщиной 2÷3 мм. Катушка. По своей конструкции они бывают каркасными и бескаркасные, а по форме круглые и прямоугольные. На одном каркасе может быть несколько обмоток. Бескаркасная обмотка почти полностью использует намоточное окно. Тяговые и механические характеристики ЭМ аналогичные тяговым и механическим характеристикам реле. Электромагниты переменного тока. Якорь ЭМ притягивается к сердечнику даже при подаче переменного тока. По формуле Максвелла запишем после преобразований окончательное выражение для тягового усилия:
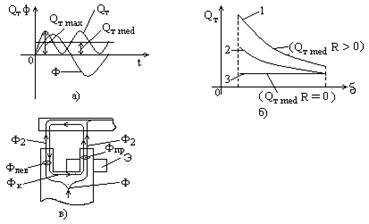
Пульсирующее тяговое усилие можно представить в виде двух составляющих рис. 13 а):
Где: Q тmed=0,5 QТmax - постоянная составляющая, т. е. средние значение тягового усилия; Q T~=0,5 QТmax cos 2ωt – переменная составляющая.
Рис. 13. Магнитный поток и тяговые усилия ЭМ а), тяговые характеристики ЭМ постоянного (кривая 1) и переменного (кривая2, 3) токов б) и схема экрана для устранений вибраций якоря в). Как видно на рис.13 а), тяговое усилие изменяется с двойной частотой сети и в некоторые моменты Q T обращается в нуль. Это приводит вибрации ЭМ, что приводит к повышенному механическому износу и возникновению шума. Эффективным средством снижения вибрации якоря является снижение пульсации тягового усилия с помощью магнитных экранов (короткозамкнутых витков), охватывающих часть сечения сердечника рис.13 в). Электромагнитные муфты предназначены для передачи вращающего момента с ведущего входного вала на соосный ведомый вал. Первым классификационным признаком служит управляемость муфт, затем – род управляющей энергии, далее – характер связи входного и выходного валов и принцип управления. К большой группе относятся электромеханические муфты, в которых для передачи момента исполнительному механизму используют электрический сигнал. Электромеханическую муфту можно рассматривать как усилитель с коэффициентом усиления по мощности. Фрикционные муфты (ФМ) предназначены в основном для жесткого сцепления валов. Фрикционные муфты или электромеханические муфты сухого трения, с механической связью рис. 14 характеризуются большим разнообразием конструкций и схем управления.
1 – ведомый вал; 2, 4 – полумуфта; 3 – фрикционные диски; 5 - обмотка; 6 – токосъемные кольца; 7 – ведущий вал. Рис. 14. Схема однодисковой фрикционной муфты.
Рассмотрим конструкцию и принцип действия однодисковой фрикционной муфты. На ведущий вал 7 жестко посажена полумуфта 4, являющаяся сердечником и ярмом электромагнита. Его якорем служит полумуфта 2, которая соединена с ведомым валом 1 скользящей посадкой и следовательно, может перемещаться в осевом направлении. С помощью колец 6 и щеток на обмотку 5 подается управляющее напряжение. Возникающее тяговое усилие вызывает притяжение якоря к сердечнику и плотное сцепление фрикционных дисков 3 из материалов с высоким коэффициентом трения, благодаря чему обеспечивается сцепление валов. Основное достоинство однодисковых ФМ, простота. Для увеличения передаваемого момента и уменьшение габарита муфты применяют многодисковые ФМ. Ферропорошковые муфты (ФПМ) предназначены в основном для гибкого сцепления валов, хотя можно применить и для жесткого сцепления рис. 15.
2 – контактные кольца; 3 – ведущий вал; 4 – щетки; 5 – крышки; 6 – детали, выполненные из ферромагнитных материалов; 7 – обмотка возбуждения; 8 – порошковая смесь; 9, 10 - концентрические поверхности; 11 – уплотнение; 12 – ведомый вал; 13 – подшипники; 14 – крышки. Рис. 15. Ферропорошковая муфта. На рис. 15 а) показана схема цилиндрической ФПМ с двумя концентрическими поверхностями 9 и 10. Кольцевое пространство между ними заполнено порошковой смесью 8. На внутренней ведущей полумуфте расположена обмотка возбуждения 7, выведенная на контактные кольца 2, к которым прижимаются щетки 4. Крышки 5 и 14, изготовленные из немагнитного материала, позволяет направить большую часть магнитного потока через порошковый слой, уменьшив поток рассеяния, и снизить массу ведомой полумуфты. Часто ФПМ применяют в качестве сцепных, предохранительных, динамометрических и тормозных, а благодаря линейной зависимости М(I) и в качестве усилителей мощности для сервоприводов и следящих систем. Муфты скольжения (МС) предназначены в основном для гибкого сцепления валов и регулирования частоты вращения ведомого вала при нерегулируемом приводном двигателе. Их называют также асинхронными индукционными муфтами со связью через поле с электромагнитным управлением.
1 – ведущий вал; 2- токосъемные кольца; 3 – зубцы; 4 – якорь; 5 – обмотка; 6 – индуктор; 7 – ведомый вал. Рис. 16. Схема индукционной муфты скольжения.
На рис. 16 показана схема муфты индукторного типа со скользящими токоподводящими контактами, основными частями которой является якорь 4 и индуктор 6. Между двумя рядами зубцов 3 муфты размещена обмотка 5, питание к которой подводится с помощью колец 2. Индуктор с помощью шлицов соединяется с ведущим валом 1, а якорь посажен на ведомом валу 7. При вращении индуктора вследствие механического перемещения электромагнитов возникает вращающееся магнитное поле. Взаимодействие наводимых при этом в якоре вихревых токов с вращающимся магнитным полем движет якорь в сторону вращения индуктора.
Электродвигательные исполнительные элементы и устройства. Серводвигатель является разновидностью электропривода; принцип их действия тот же, что и у силовых двигателей, но работают они в специфических условиях, определяющих некоторые требования к их конструкции и схемам включения. Серводвигатель в отличие от обычного приводного устройства непрерывно работает в переходных режимах Электродвигатели постоянного тока широко применяются в системах автоматики и телемеханики. К положительным качествам исполнительных двигателей постоянного тока относится: - возможность получение любых, сколь угодно малых и больших вращений; - простого, плавного, экономичного и в широком диапазоне регулирования частоты вращения; - устойчивость работы; - линейность механических характеристик; - отсутствие самохода; - значительный пусковой момент. Основным недостатком является наличие скользящих контактов коллектор и щеток. В схемах автоматики широко используют также бесконтактные двигатели постоянного тока и двигатели с постоянными магнитами вместо обмоток возбуждения. Они обладают более высокий КПД, неизменностью основного магнитного потока от температуры и колебаний напряжения сети. Для уменьшения момента инерции применяют якоря с печатной обмоткой в виде дисков или цилиндров. Такие двигатели относят к группе малоинерционные. Электродвигатели переменного тока самые распространенные силовые микродвигатели автоматики в настоящее время. Двигатели переменного тока делятся на две группы асинхронные и синхронные. Широкое распространение получили асинхронные электродвигатели. Классифицируем асинхронные двигатели рис. 17.
Рис. 17. Классификация силовых асинхронных микродвигателей. Как и двигатели на постоянном токе с полом ротором выпускаю и асинхронные двигатели на переменном токе с полым ротором. В ряде схем автоматики возникает задача необходимость получения малых частот вращения n. У синхронных и асинхронных двигателях переменного тока это достигается с помощью числа пар полюсов. n=60ƒ/р. 3). К таким двигателям можно отнести синхронный двигатель марки ДСО -32, конденсаторные двигатели типа ДСК и ДСКР. В настоящее время в схемах автоматики получили весьма широкое распространение синхронные гистерезисные микродвигатели.
Шаговые электродвигатели. С внедрением систем управления с ЧПУ потребовалось разработка специальных исполнительных двигателей, которые получили название шаговых. Шаговый двигатель это электромеханические устройства, которые преобразуют электрические импульсы напряжения управления в дискретные (скачкообразные) угловые и линейные перемещения ротора с возможной его фиксацией в нужных положениях. Первые шаговые двигатели изготовлялись в виде электромагнита, приводящего во вращение храповое колесо рис. 18,которое за одно включение электромагнита под напряжение (за один такт) перемещается на вполне определенный угол – шаг, величина которого определяется величиной зубцового шага храпового колеса
Рис. 18. Шаговый двигатель с электромагнитом и храповиком.
В настоящее время на производстве применяют различные по конструкции шаговые двигатели. Шаговые двигатели делятся по типу ротора: - с пассивным ротором; - с активным ротором; - индукторные; - реактивные. По числу фаз: - однофазные; - двухфазные; - многофазные. По числу пакетов стали магнитопровода двигателя: - однопакетные; - двухпакетные; - многопакетные. По способу фиксации ротора при обесточенных обмотках управления: - с внутренней; - с внешней.
Шаговые двигатели с пассивным ротором. На рис. 20 изображены схемы работы m- фазного шагового двигателя. Питание обмоток статора может быть либо однополярным, либо двухполярным.
а) б) в) а) – поочередное питание однополярными импульсами; б) – питание четного числа обмоток; в) – питание нечетного числа обмоток. Рис. 20. Схемы работы m- фазного шагового двигателя;
Каждому состоянию такту коммутации, число которых зависит от способов включения обмоток, соответствует вполне определенные величины и направление вектора F результирующей МДС двигателя, следовательно, и вполне определенное положение ротора в пространстве. Если обмотки двигателя питать поочередно (1, 2, 3, …,m) однополярными импульсами, то ротор двигателя будет иметь m устойчивых положений, которые совпадают с осями обмоток рис.20 а). Если питаются четное число обмоток, положения результирующего вектора МДС проходит между двумя средними обмотками рис. 20 б). В том случае, когда питается нечетное число обмоток, устойчивые положения ротора совпадают с осью средней обмотки рис. 20 в). В этих случаях ротор двигателя будет иметь m устойчивых положений, однако соседние положения в этих случаях будут смещены на угол 2π / (2 m)= π/ m. Если поочередно включать то четное, то нечетное число обмоток (например, 1 – 2, 1 – 2 – 3, 2 – 3, 2 – 3 – 4 и т. д.), то число устойчивых положений ротора n увеличится вдвое n=2 m. При включении обмоток поочередно равными группами по две, три и т, д.,называют симметричным. Если включать обмотки неравными группами, то такое управление называют несимметричным. При потенциальном управлении напряжения на обмотках изменяется только в момент поступления управляющего сигнала, команды. При отсутствии управления обмотки остаются под напряжением. При импульсном управлении любая обмотка (или группа обмоток), возбужденная сигналом, импульсом управления после окончания импульса обмотки статора двигателя автоматически обесточиваются. На рис. 21 показан принцип работы двухфазного шагового двигателя типа ШД-2-1.
Рис.21. Схема обмоток а) и порядок коммутации, б) вращение вперед, а в) обратно, шагового двигателя ШД-2-1. Управление рассмотренного двигателя осуществляется однополярными импульсами, что значительно упрощает коммутацию.
Однопакетные шаговые двигатели с активным ротором по своей конструкции мало отличаются от обычных синхронных двигателей. Их роторы чаще возбуждаются постоянными магнитами. Роторы имеют явно выраженные полюса и с цель уменьшения шага изготовляют их многополюсными в виде магнитов звездочек. При необходимости фиксации ротора в обесточенном состоянии статоры изготовляются без скоса пазов. Для увеличения фиксирующего момента пазы статора имеют значительные прорези. Для обеспечения минимального зазора шаговые двигатели часто имеют сквозную конструкцию. Выпускается несколько серий шаговых двигателей с активным ротором ДШ-А, ШДА, ШДА-3, ДША и др. Иногда для индикаторных целей (работа почти без момента) применяются гистерезисные шаговые двигатели, у которых ротор не имеет явно выраженных полюсов и возбуждается поле статора. Шаговые двигатели индукторного типа имеют следующие отличительные признаки. Пакеты их статоров и роторов изготовляются из листов магнито-мягкой электротехнической стали. Пазы ротора открытые. Ротор пассивный. Статор имеет два вида пазов большие полузакрытые, в которых размещается обмотка, и малые открытые, выполняемые на зубцах, образуемых большими пазами рис.22. Совокупность открытых пазов статора, расположенных на одном большом зубце, называют гребенчатой зоной. Особенностью индукторных двигателей является то, что магнитный поток в их воздушном зазоре при работе двигателя содержит постоянную и переменную составляющие.
Рис. 22. Схема четырехфазного шагового двигателя индукторного типа с самовозбуждением. Шаговые реактивные двигатели, также как и индукторные, имеют невозбужденный (пассивный) ротор. Конструктивно они схожи с индукторными двигателями, имеющими электромагнитное возбуждение, хотя они имеют обмотки возбуждения. Одним из недостатков реактивных шаговых двигателей является отсутствие внутренней магнитной фиксации ротора при обесточенных обмотках статора.
Двигатели для микроперемещений необходимы для подачи прецизионных шлифовальных станков, приборов точной механики и оптики, требующие перемещений нескольких микронов. Одна из возможностей построение таких двигателей на основе теплового расширения тела, электромагнитного взаимодействия, магнитострикций, обратного пьезоэффекта. Выше перечисленные двигатели обладают недостатками инерционность, малое тяговое усилие, Однако широко применяют магнитострикционные двигатели, в которых используется свойство стержня из ферромагнитного материала изменять длину под воздействием магнитного поля. Наиболее предпочтителен пьезоэлектрический двигатель, который изготовлен из столбика из пьезокерамических шайб склеенные между собой. Максимальное относительное удлинение может составлять (5÷7) 10¯. Часто максимальные перемещения, которые могут обеспечить магнитострикционный и пьезоэлектрический двигатели, недостаточны. Тогда приходится прибегать к шаговым двигателям, построенным на тех же принципах.
  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|