
|
|
Задачи теории автоматического управления.Стр 1 из 5Следующая ⇒ Общие понятия Понятие ТАУ как науки. Наука изучающая общие для всех замкнутых автоматических систем (вне зависимости от их физической природы) принципы построения, методы исследования статических и динамических св-в и метода выбора параметров системы для достижения предъяв-ых к ней требований. Основные понятия и определения теории управления. Def Автоматизация – любой технический процесс состоит из ряда операций. Все операции делят на две группы: a) энергетические или силовые, б) информационные. К силовым относятся основные операции по обработке изделия. Для своего совершения они требуют затрат энергии. К информационным операциям относятся опер-ии контроля параметров техн. процесса, регул-ие технологич. режимов, управл. очередностью силовых операций. Контроль регулирования управления. В немеханизированном и в неавтоматизированном произв-е силовые операции выполняются за счет мускульной силы человека, а инфор-ые за счет умственной деятельности. Процесс освобождения человека от участия в силовых операциях произв-ва назыв. механизацией. Для этого придумали два вида машин:1) машины двигателя и 20 машины орудия. Процесс освобождения человека от участия в инфор-ых операциях производства назыв. автоматизация. Встречают автоматизацию: комплексную и не комплексную, полную и частичную. При комплексной автомат-и она охватывает весь комплекс операций по обработке изделия от получения сырья до выпуска готовой продукции. При частичной автомат-и она охватывает только часть информационных операций, например контроль и регулирование. В любой системе автомат. управ-я можно выделить две основные части: 1) объект управления (ОУ) 2) устройство автоматического управления (УАУ). Def ОУ – назыв. совокупность техн-их средств, которые нуждаются в специал. организованном воздействии из вне для достижения поставленной цели. Def Управление это целенаправленное изменение состояния ОУ. Состояние объекта характ-ют рядом параметров, кот. отражают как влияние внешней среды на объект, так и внутреннее состояние объекта. В ТАУ обычно абстракцируются от конкретно физической природы и конструкции объекта, и представляют его в виде черного ящика. Тех. система-совокупность и аппаратов, выполняемых то или иной технологический процесс Технологический процесс-порядок и правила действия по созданию продукции или изделия Автоматическое управление-упр. без участия человека Автоматизированное управление-где система автом. управ. автоматически конпенсирует действия возмущения стабилизирует вых. координату с заданной точностью Алгоритм функционирования-совокупность правил и законов определ-х ход тех. процессов или работы САР Алгоритм управления- совокупность правил и законов по кот. осуществляется управл. воздействие Регулятор-устройство,которое осуществляет управляющее воздействие и действует непосредственно на ОУ Управляющий орган(исполнительный)- устройство кот. изменяет упр. воздействие и действует непосредственно на ОУ. САУ-такая системе,кот. без участия человека реализует алгоритм функционирования САР- такая система,кот. осущ. действия возмущения,поддерживая заданное значение вых. координаты с заданной точностью Задачи теории автоматического управления. В процессе разработки и проектирования САУ можно выделить следующие этапы: 1) изучение ОУ т.е определ-е его характеристики, параметров, условие работы и воздействие которое он испытывает. Это будет задача идентификации. Цель: получить теорет-ми и эксперимен-ми математ. модель ОУ и других объектов управления. 2) Формулирование требований предъявляемых системе. Это требования обычно формируются в техническом задании (ТЗ) проекта. На этом этапе речь идет о том, что требования обычно составл. технологами переформируются и уточняются в терминах ТАУ. Задача критериев качества САУ (оценка критериев качества). 3) Выбор структуры САУ и параметров элементов системы для удовлетворения поставленных требований. Задача структурного и параметрического синтеза. 4) Исследование спроектирован. системы ТАУ в целях проверки удовлетворяет ли она поставленным требованиям. Задача анализа, в этой задаче обычно выделяют подзадачи: а) исследование устойчивости САУ; б) определение точности в установившемся режиме; в) определение показателей или критериев качества переходных процессов в САУ при различных воздействиях на нее.
В ТАУ обычно абстракцируются от конкретно физической природы и конструкции объекта, и представляют его в виде черного ящика. X={x1,x2,..,xn}- внутренние параметры состояния объекта. Y={y1,y2,..,ym}- выходные параметры через которые объект влияет на окружающую среду. Те выходные параметры которые измеряются назыв. контролируемыми. Контролируемые параметры по которым формируются цели управления назыв. управляемыми. Параметры отражающие влияние внешней среды на объект назыв. воздействиями. Воздействие на ОУ которые формируются УАУ назыв. управляющими воздействиями (U). Воздействие на объект, которые не зависят от системы управления назыв. возмущающими или возмущениями (F). Возмущения в свою очередь делятся на нагрузку и помехи. Наличие нагрузки связано с работой объекта и от нее нельзя защититься. Помехи связанные с различными родами побочными эффектами и уменьшение их улучшает работу объекта. Характерной особенностью ОУ и других элементов системы управл-я яв-ся направленное прохождение сигналов, что отражается стрелками на рисунке. В этом случае у объекта и других элементов можно выделить вход и выход. Вход это место (точка), где к объекту, к элементу прикладывается внешнее воздействие. Выход это место (точка), где оценивается реакция объекта или элемента на входное воздействие. Входов и выходов может быть несколько. УАУ – это устройство, которое формирует в соответ. с заложенным им алгоритмом управляющее воздействие на объект. ОУ + УАУ = САУ; ОР + АР =САР (система автомат. регулирования). Различают управление ручное, автоматизированное и автоматическое. Ручное –управление осуществляется человеком. Автоматизированное – устр-во управ-я выдает рекомендации, но окончательное решение остается за человеком. Автоматическое – человек полностью освобождается от автомат. управления.
Элементы и звенья АСУ Принципы построения АСУ и их классификация Принципы построения САУ. САУ несмотря на все разнообразие по конструкции, принципу действия существуют ограничения количество способов их построения. 1) разомкнутая без рефлексная система управления.
ЗУ – задающее устройство; Uз – задающее воздействие; ИУ – исполняющее устройство; U – управляющее воздействие; f – возмущение; Y – выходной сигнал. ЗУ- руководствуясь какими либо внутренними сигналами (часы) измеряет Uз. Через УУ и ИУ это изменение передается на объект управления вызывая изменения управляемой величины Y. Пример: управление стиральных машин. Дост-во: простота конструкции. Недостатки: при наличии возмущающей f выходная величена Y будет отклоняться от определ-го значения, но УУ ничего об этом не знает и никак на это не реагирует. 2) Разомкнутая система управления по возмущениям или принцип Понсле.
Дf – датчик возмущения. Т.к причина отклонения выходной величины Y возмущение f, то его измеряем и в зависимости от его величины, формы формируем управляющее воздействие на объект, чтобы скомпенсировать влияние возмущения на объект. Дост-ва: высокое быстродействие, реагирует на причину. Недостатки: для полной и точной комплектации необходимо иметь точную математическую модель по каналам управления и каналам возмущения. Это дорого и даже эта модель с течением времени становится не точной. Возмущений может быть несколько, все возмущения измерить дорого и сложно. В результате управляемая величина Y будет отклоняться от заданного значения. 3) замкнутая САУ по отклонению (принцип по отклонению).
Е=Uз – Uос -> ошибка регулирования управления или отклонения. Здесь величина измеряется и сравнивается с заданным значением. В зависимости от величины и знака отклонения Е управляющее УУ через ИУ воздействует на ОУ стремлясь уменьшить величину отклонения. Дост-ва: универсальность, устройство управления реагирует на любые отклонения. Недостатки: противоречивость самого принципа. Для этого чтобы уменьшить отклонения надо его с начало допустить. 4) Комбинированное САУ.
тр
Действие основного возмущения компенсируется управлением по разомкнутому принципу, а не точность компенсации и влияние неучтенных возмущений устраняется управлением по замкнутому контуру. 5) Адетивное САУ.
СС- система самонастройки.
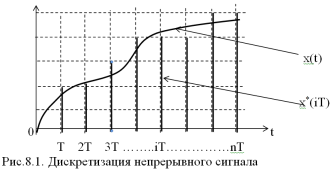
Устойчивость линейных АСУ В процессе работы на систему действуют различные возмущающие силы, вызывающие ее отклонение от заданного закона движения. Если под влиянием возмущения система отклонилась от состояния равновесия и после прекращения действия внешнего возмущения снова вернулась в исходное состояние, то такая система устойчива. Если под влиянием внешнего возмущения система будет отклоняться от состояния равновесия, а после прекращения действия возмущения система не возвращается в исходное состояние, а удаление системы с течением времени возрастает, то такая система называется неустойчивой. В линейных системах отклонение при неустойчивом движении будет неограниченно возрастать. Необходимое и достаточное условие устойчивости является выполнение требования, в соответствии с которым характеристическое уравнение системы должно иметь отрицательную вещественную часть. Наличие среди корней характеристического уравнения хотя бы одного корня с положительной вещественной частью свидетельствует о невыполнении этого условия, т.е. приводит к неустойчивости системы. Устойчивость в линейной системе характеризуется затуханием переходного процесса. Т.к. затухание переходного процесса в свою очередь определяется только корнем характеристического уравнения и не зависит от воздействия, то устойчивость является внутренним свойством линейной системы. Для определения устойчивости системы необходимому и достаточному условию нужно уметь находить корни характеристического уравнения. Это можно сделать просто для уравнения 1-го и 2-го порядков. Реальные системы десятых, сотых порядков. Поэтому для анализа устойчивости без нахождения корней характеристического уравнения, используют критерии устойчивости. Линейные дискретные АСУ Система автоматического управления называется дискретной, если выходная величина какого – либо ее элемента имеет дискретный характер. Большое внимание к теории и практике дискретных систем объясняется все большим использованием в замкнутом контуре управления цифровых вычислительных машин (ЦВМ). Это обеспечивает системе значительно большие вычислительные возможности, высокую стабильность, простоту перестройки ее структуры и параметров. Так как информация о состоянии объекта управления является непрерывной, то перед подачей на вход ЦВМ ее необходимо преобразовать в дискретную форму. Эту задачу выполняет преобразователь “ аналог – код ”, который в теории автоматического управления принято называть импульсным элементом” (ИЭ). Дискретизация осуществляется путем квантования непрерывного сигнала по времени и по уровню. Это означает, что аналоговый сигнал в ИЭ через равные промежутки T заменяется дискретными по уровню значениями, ближайшими к значениям непрерывного сигнала (рис.8.1).
В результате дискретизации непрерывный сигнал заменяется серией импульсов бесконечно малой длительности, амплитуда которых близка к значениям непрерывного сигнала в моменты дискретизации. Ошибки дискретизации по уровню определяются только точностью представления чисел в ЦВМ и они настолько малы, что ими в практических приложениях можно пренебречь. Это дает возможность рассматривать ИЭ только как дискретизатор по времени. На структурных схемах ИЭ изображается в виде ключа. Серия импульсов x*(iT) на выходе импульсного элемента называется решетчатой функцией. После производства вычислений на выходе ЦВМ информация появляется также в виде тешетчатой функции. Перед подачей этой информации на исполнительную систему, которая является аналоговой, ее необходимо преобразовать из дискретной в непрерывную. Эту задачу решают преобразователи “код – аналог”, которые в теории автоматического управления получили название экстраполяторов. В полном соответствии со своим наименованием, эти устройства экстраполируют значение сигнала на такт вперед. Наиболее часто используется экстраполятор нулевого порядка, который реализует операцию
Устойчивость нелинейных АСУ Абсолютной устойчивостью называется устойчивость системы при любых начальных отклонениях для любой формы нелинейной характеристики, принадлежащей к одному из определенных классов. Общие сведения
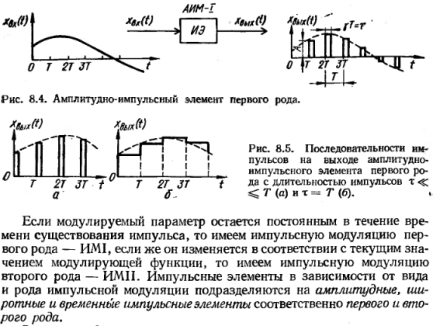
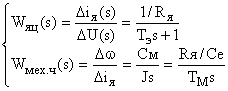
Измерительные Датчик тока Датчик тока (измерительный трансформатор тока) с фильтром, как элемент САУ, описывается дифференциальным уравнением вида:
где
При изменении тока двигателя
Это уравнение в операторной форме записи представляется как:
Тогда передаточная функция датчика тока с фильтром примет вид:
Для практических расчетов можно пренебречь постоянной времени фильтра (
Датчики скорости Наиболее широко применяемым в системах управления технологическим оборудованием датчиком скорости является тахогенератор, на выходе которого включается дополнительный фильтр. Эти элементы САУ, описываются следующим дифференциальным уравнением:
где
Тахогенератор является безинерционным звеном
Переходя к операторной форме записи, получаем:
Преобразовывая это уравнение, получаем передаточную функцию обратной связи по скорости:
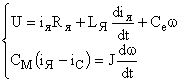
Исполнительные Электродвигатель постоянного тока Двигатель постоянного тока, как элемент САУ, описывается дифференциальными уравнениями якорной цепи и механической части двигателя:
где
При изменении напряжения на входе двигателя на некоторую величину
Преобразовывая уравнения (5) и, считая
Из уравнений (6) получаем выражения для передаточных функций якорной цепи и механической части двигателя:
где
Согласно этой системе получаем, что развернутая структурная схема двигателя принимает вид, показанный на рис.1.
Рис. 1. Развернутая структурная схема двигателя
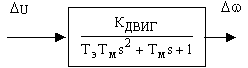
Свертывая развернутую схему, двигатель можно представить одним колебательным звеном (рис. 2):
где
ЭВМ в контуре управления Универсальность цифровых вычислительных машин как средства решения самых разнообразных задач, огромные объемы информации, перерабатываемые и хранимые в ЭВМ, мощные алгоритмические возможности сделали ЭВМ эффективным средством решения современных задач управления. В современной теории и практике управления динамическими системами используются электронно-вычислительные машины (ЭВМ) различных типов, отличающиеся принципом действия, составом элементной базы, возможностями использования в системах управления. ЭВМ общего назначения. Это такая архитектура вычислительных средств и программного обеспечения, которая позволяет единообразно решать большинство возникающих технических задач, включая задачи сопряжения с ЭВМ широкой номенклатуры внешних устройств и датчиков. Использование ЭВМ общего назначения упрощает и ускоряет процесс разработки стандартного проекта в области автоматизации, однако конечное решение обычно не является оптимальным. ЭВМ общего назначения включает в себя стандартный набор компонентов: - Центральный процессор (один или несколько) и арифметический сопроцессор. - Быстродействующее запоминающее устройство. - Внешние накопительные устройства различной природы. - Мультимедийные (графическое и звуковое) устройства. - Терминал пользователя (дисплей, клавиатура, мышь и т.п.). - Средства сетевой поддержки. - Возможность подключения дополнительных интерфейсных устройств, в том числе, и в виде контроллеров, присоединяемых к шине ЭВМ. - Возможность установки разнообразного программного обеспечения. На сегодняшний день этим требованиям в основном удовлетворяют персональные РС-совместимые компьютеры и контроллеры на базе их архитектуры. На такой базе строят системы автоматики, если к ним не предъявляются повышенные требования. Часто ПК используют на начальном этапе проектирования системы, когда требуется ускоренно получить работоспособную версию системы, необходимую для дальнейшей разработки. Обычно таким разработкам присущи следующие характерные недостатки: - невысокая надежность, как аппаратной, так и программной части; - узкий температурный диапазон, особенно в сторону отрицательных температур; - низкое качество исполнения материнских плат и плат контроллеров; - повышенный уровень помех и пульсаций по шинам питания. Тем не менее, ПК с успехом используются в качестве интеллектуальных измерительных приборов. Специализированные ЭВМ и вычислительные комплексы. Это ЭВМ, имеющие функциональные возможности и конструктивные особенности, позволяющие использовать их для эффективного решения ограниченного класса задач в определённых условиях окружающей среды. Отличия от ЭВМ общего назначения могут быть разнообразными, например, процессор со специальной системой командВычислительный комплекс (ВК) - это комплекс средств ВТ, решающий прикладную задачу. В ВК могут входить разнородные компоненты. Обычно приходится применять специализированные или проблемно-ориентированные вычислительные средства для оптимизации окончательного решения при проектировании систем автоматического управления. Управляющие ЭВМ (УВМ), управляющие ВК (УВК) и промышленные ПК. УВМ и УВК характеризуются набором возможностей работы в режиме реального времени. Эти возможности касаются как подсистемы ввода-вывода, так и свойств операционной системы. Также следует отметить возможности обнаружения сбоев и быстрого восстановления после них. Промышленные (индустриальные) ПК - это специально спроектированные ПК, совместимые со стандартными архитектурно и программно, но отличающиеся конструктивным исполнением. Цель - повышение надёжности, помехозащищённости и расширения диапазона параметров окружающей среды нормального функционирования (температурный диапазон и т.п.). Преимущество таких ПК - возможность отладки программного обеспечения на обычных ПК. Рабочие станции. Обычно это персональные компьютеры, находящиеся на рабочих местах сотрудников, решающих конкретную задачу с помощью ЭВМ. Поэтому рабочие станции оборудованы всеми необходимыми устройствами ввода-вывода. Обычно рабочие станции входят в сеть, в которой также имеются мощные серверы, поставляющие информационные ресурсы и необходимое сетевое программное обеспечение, хранение которого на рабочих станциях нецелесообразно. Рабочие станции не предназначены для работы в реальном времени и используются на диспетчерском уровне и на рабочих местах разработчиков.
Линейные непрерывные АСУ Линейная АСУ называется непрерывной, если во всех ее звеньях непрерывным изменениям входных величин соответствую непрерывные изменения выходных переменных. Одно из условий непрерывных систем заключается в том, чтобы статические характеристики звеньев в них были непрерывными. z’=Az(t)+Bx(t- τ),
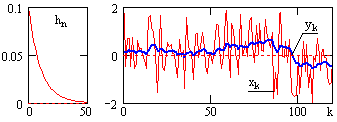
Фильтрация Если параметры случайного входного сигнала специально не оговариваются, то по умолчанию принимается, что на вход фильтра поступает реализация случайного стационарного процесса x(kt) с нулевым средним, которая вызывает сигнал y(kt) на выходе фильтра. Значение t, как обычно, принимаем равным 1. Сохранение природы сигнала. Допустим, что фильтр имеет импульсный отклик h(n) = exp(-a·n), n ³ 0. Зададим на входе фильтра стационарный квазидетерминированный случайный сигнал, который не обладает свойством эргодичности, но имеет все свойства случайного сигнала, и может быть описан в явной математической форме:
Рис. 5.1.1. Фильтрация квазидетерминированного сигнала. x(k) = A + cos(2k+), где A и - взаимно независимые случайные величины, причем значение равномерно распределено в интервале [0, 2]. При этом выходной сигнал определится выражением: y(k) = h(n) ③ x(k-n) º y(k) = A/3 + [3 cos(2k+) + 2 sin(2k+)]/13. Из этого выражения следует, что выходной сигнал фильтра также является случайным и содержит те же самые случайные параметры, что и входной сигнал, а, следовательно, для него существуют определенные статистические характеристики. Пример реализации квазидетерминированного случайного сигнала и его фильтрации аналогом сглаживающего RC-фильтра приведен на рис. 5.1.1. Математическое ожидание (индекс операции – М) произвольного входного случайного стационарного сигнала x(k) на выходе фильтра определится выражением:
Отсюда следует, что математическое ожидание выходных сигналов фильтра равно математическому ожиданию входных сигналов, умноженному на коэффициент усиления фильтром постоянной составляющей. При Кпс = 1 среднее значение выходных сигналов не изменяется и равно среднему значению входных сигналов. Если фильтр не пропускает постоянную составляющую сигналов (сумма коэффициентов импульсного отклика фильтра равна нулю), то случайный выходной сигнал всегда будет иметь нулевое математическое ожидание. Корреляционные соотношения. Для нецентрированных входных сигналов x(k) размером (0-К) автокорреляционная функция (АКФ), а равно и функция автоковариации Kx(n) (ФАК) для центрированных случайных сигналов, вычисляется по формуле: Rx(n) = [1/(K+1-n)] Формула применяется довольно редко, в основном для детерминированных сигналов с небольшим числом отсчетов. Для случайных и зашумленных сигналов уменьшение знаменателя (K-n) и числа перемножаемых отсчетов по мере увеличения сдвига приводит к нарастанию статистических флюктуаций вычисления АКФ. Большую достоверность в этих условиях обеспечивает вычисление АКФ в единицах мощности сигнала по формуле: Rs(n) = т.е. с нормированием на постоянный множитель 1/K и с продлением сигнала нулевыми значениями (в левую сторону при сдвигах k-n или в правую сторону при использовании сдвигов k+n). Эта оценка является смещенной и имеет несколько меньшую дисперсию, чем по формуле (5.1.2). Разницу между нормировками по формулам (5.1.2) и (5.1.3) можно наглядно видеть на рис. 5.1.2.
Рис. 5.1.2. Формулу (5.1.3) можно рассматривать, как усреднение суммы произведений, т.е. как оценку математического ожидания: Rs(n) = M{sk sk+n} @
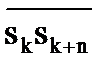
По аналогичной формуле может быть вычислена и АКФ выходных сигналов. Для произведения выходных сигналов y(k) и y(k+n), образующих функцию автокорреляции выходных сигналов, можно также записать (без дополнительных множителей): y(k) y(k+n) = Если взять математические ожидания от обеих частей этого равенства, то, с учетом соотношения в правой части под знаками сумм M{x(k-i) x(k+n-j)} = -Rx(k-i-k-n+j) = Rx(n+i-j), получим: Ry(n) = Таким образом, функция автокорреляции выходного сигнала равна АКФ входного сигнала, свернутой дважды, в прямом и обратном направлении, с импульсным откликом фильтра, что сохраняет четность АКФ выходного сигнала. Для центрированных процессов аналогичное заключение действительно и для ковариационных функций. На рис. 5.1.3 приведен пример нормированных АКФ входной и выходной случайных последовательностей при фильтрации RC-фильтром, форма импульсного отклика которого также приведена на рисунке.
Рис. 5.1.3. Функции корреляционных коэффициентов. Заметим, что для свертки импульсных откликов, производя замену nj = m, мы имеем равенство: h(n+i) ③ h(n-j) = h(m+i+j) ③ h(m) = h(m) ③ h(m+p) = Rh(m), где Rh(m) - функция корреляции импульсного отклика фильтра. Отсюда: Ry(n) = Rx(n) ③ Rh(m). (5.1.5') Это означает появление в случайном сигнале на выходе фильтра определенной корреляционной зависимости, определяемой инерционностью фильтра. Эффективный интервал k корреляции данных в сигнале тем меньше, чем выше верхняя граничная частота в его спектра (по уровню 0.5): к = /в =1/2fв. Оценка интервала корреляции для конечных (непериодических) функций, как правило, производится непосредственно по функциям автокорреляции R(n): k = 2n|R(n)/R(0)| - 1, (5.1.6) где значение n ограничивается величиной 3-5 интервалов спада центрального пика до величины порядка 0.1×R(0). Без такого ограничения за счет суммирования модуля флюктуаций, не несущих информации, значениеk завышается относительно расчетного по спектральной характеристике сигнала. Значение k может определяться также непосредственно по координате пересечения нулевой линии функцией автоковариации K(n). Дальше обычно начинаются статистические флюктуации значения K(n) около нулевой линии, вызванные ограниченностью выборки . Функция Rx(n) случайных статистически независимых отсчетов близка к функции, свертка которой с Rh(m) приведет к формированию на выходе выходного сигнала, нормированная форма АКФ которого будет стремиться к форме Rh(m). При достаточно большой выборке случайных отсчетов входного сигнала это означает практически полное повторение функцией Ry(n) формы корреляционной функции импульсного отклика, как это можно видеть на рис. 5.1.4, который отличается от рис. 5.1.3 только количеством выборки К=10000. Соответственно, интервал корреляции выходных сигналов для случайной входной последовательности можно определять непосредственно по функции (5.1.6) непосредственно импульсного отклика фильтра. Для взаимной корреляционной функции (ВКФ) Rxy входного и выходного сигналов соответственно имеем: x(k) ③ y(k+n) = Rxy(n) = т.е. функция взаимной корреляции входного и выходного сигналов равна свертке АКФ входного сигнала с функцией импульсного отклика фильтра. Заключение действительно и для функций ковариации. Другая взаимно корреляционная функция Ryx может быть получена из соотношения: Ryx(n) = Rxy(-n) º h(i) ③ Rx(n+i). (5.1.7') Отметим, что для статистически независимых случайных величин при одностороннем импульсном отклике (h(i) = 0 при i<0) функция Rxy(n) также является односторонней, и равна 0 при n<0, а функция Ryx соответственно равна 0 при n>0. 9.1 Основы теории нечетких множеств. Пусть E - универсальное множество, x - элемент E, а R - некоторое свойство. Обычное (четкое) подмножество A универсального множества E, элементы которого удовлетворяют свойству R, определяется как множество упорядоченных пар A = {mA (х)/ х }, где mA(х) - характеристическая функция, принимающая значение 1, если x удовлетворяет свойству R, и 0 - в противном случае. Нечеткое подмножество отличается от обычного тем, что для элементов x из E нет однозначного ответа "да-нет" относительно свойства R. В связи с этим, нечеткое подмножество A универсального множества E определяется как множество упорядоченных пар A = {mA(х)/ х }, где mA(х) - характеристическая функция принадлежности (или просто функция принадлежности), принимающая значения в некотором вполне упорядоченном множестве M (например, M = [0,1]). Функция принадлежности указывает степень (или уровень) принадлежности элемента x подмножеству A. Множество M называют множеством принадлежностей. Если M = {0,1}, то нечеткое подмножество A может рассматриваться как обычное или четкое множество. Нечеткие модели управления На данный момент, почти все реально работающие системы можно отнести к системам, работающим   Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 (8.1)
(8.1)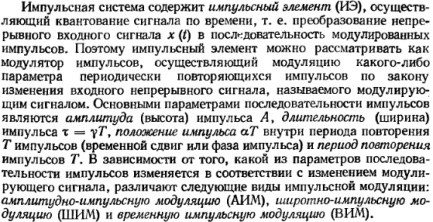

 ,
,
 – передаточный коэффициент датчика тока;
– передаточный коэффициент датчика тока; – номинальный ток тиристорного преобразователя;
– номинальный ток тиристорного преобразователя; – постоянная времени фильтра в обратной связи по току.
– постоянная времени фильтра в обратной связи по току. изменяется напряжение на выходе
изменяется напряжение на выходе  , тогда уравнение (2) в приращениях примет вид:
, тогда уравнение (2) в приращениях примет вид: .
. .
. .
. , тогда передаточная функция датчика тока примет вид безинерционного звена:
, тогда передаточная функция датчика тока примет вид безинерционного звена: .
. ,
,
 – коэффициент обратной связи по скорости;
– коэффициент обратной связи по скорости; – постоянная времени фильтра в обратной связи по скорости.
– постоянная времени фильтра в обратной связи по скорости. , а инерционность вносится за счет фильтра (
, а инерционность вносится за счет фильтра ( изменится и напряжение на выходе —
изменится и напряжение на выходе —  . Тогда уравнение (3) в приращениях примет вид:
. Тогда уравнение (3) в приращениях примет вид: ,
, ,
, .
. ,
,
 – соответственно индуктивность и активное сопротивление якорной цепи;
– соответственно индуктивность и активное сопротивление якорной цепи; — соответственно ток якорной цепи и ток нагрузки;
— соответственно ток якорной цепи и ток нагрузки; – конструктивные постоянные двигателя;
– конструктивные постоянные двигателя; – момент инерции двигателя.
– момент инерции двигателя. изменяются ток двигателя
изменяются ток двигателя  , получаем уравнения якорной цепи и механической части двигателя в приращениях:
, получаем уравнения якорной цепи и механической части двигателя в приращениях: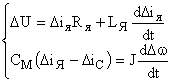
 , переходим к операторной форме записи данных уравнений:
, переходим к операторной форме записи данных уравнений: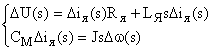
 – электромагнитная постоянная двигателя,
– электромагнитная постоянная двигателя, — электромеханическая постоянная двигателя.
— электромеханическая постоянная двигателя.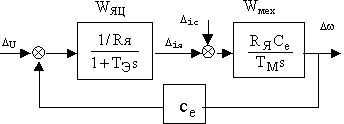
 ,
, .
.
 h(n) x(k-n)
h(n) x(k-n) = М{y(k)}= M{
= М{y(k)}= M{  h(n) x(k-n)}=
h(n) x(k-n)}= 
 x(k) x(k+n). (5.1.2)
x(k) x(k+n). (5.1.2) sk×sk+n, sk-n = 0 при k+n > K, (5.1.3)
sk×sk+n, sk-n = 0 при k+n > K, (5.1.3)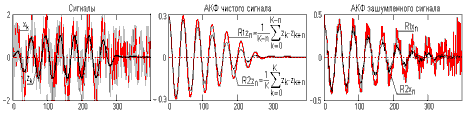
 . (5.1.4)
. (5.1.4)
 h(i)h(j) x(k-i)x(k+n-j)
h(i)h(j) x(k-i)x(k+n-j)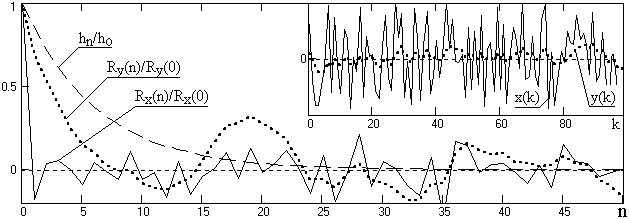
 Рис. 5.1.4 1 Функции корреляционных коэффициентов большой выборки
Рис. 5.1.4 1 Функции корреляционных коэффициентов большой выборки