|
|
ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ СИСТЕМЫ ⇐ ПредыдущаяСтр 4 из 4 Соберем модель скорректированной системы в системе моделирования Simulink. На рисунке 4.1 показана модель Simulink, составленная по структурной схеме рисунка 3.5.
Рисунок 4.1 – Модель Simulink Для начала определим прямые показатели системы для краевых случаев и величину статической ошибки. Для этого следует на главный вход системы подать единичное входное воздействие. Так как обратная связь не единичная, с точки зрения системы, единичным сигналом является величина задающего воздействия Uз = 10 В. В таблицу 4.1 сведены все интересующие нас значения. На рисунках 4.2 и 4.3 показан выход системы соответственно для минимума нагрузки и максимума нагрузки.
Таблица 4.1 – Отработка единичного входного воздействия
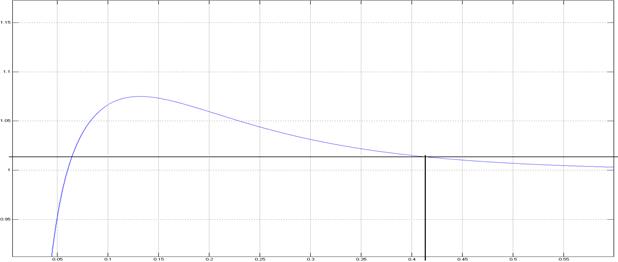
Рисунок 4.2 – Переходная характеристика при минимуме нагрузки
Рисунок 4.3 – Переходная характеристика при максимуме нагрузки Очевидно, что система не выходит по прямым показателям за пределы допустимых значений. Отметим, что ненулевая статическая ошибка в данной модели полностью обусловлена возмущением и примерно совпадает с теоретическим значением. Затем следует проверить как система отрабатывает программную траекторию. Ниже представлен код программируемого блока системы Simulink.
На рисунке 4.4 показана система после ввода программируемого блока, на рисунках 4.5 и 4.6 показан выход системы при минимуме и при максимуме нагрузки и на рисунках 4.7 и 4.8 показана ошибка системы, переведенная в относительные единицы при минимуме и при максимуме нагрузки.
Рисунок 4.4 – Модель Simulink с введенным программируемым блоком
Рисунок 4.5 – Выход системы при минимуме нагрузки
Рисунок 4.6 – Выход системы при максимуме нагрузки
Рисунок 4.7 – Ошибка системы в относительных единицах при минимуме нагрузки
Рисунок 4.8 – Ошибка системы в относительных единицах при максимуме нагрузки Внешне рисунки 4.5 и 4.6 достаточно хорошо повторяют рисунок 2.2, что воплощает основной замысел. По рисункам 4.7 и 4.8 можно определить максимальную динамическую ошибку системы, для чего необходимо засечь максимальный всплеск. По рисункам 4.7 и 4.8 максимальная динамическая ошибка системы равна
Отметим, что теоретическая динамическая ошибка совпадает по значению только в моменты торможения. В моменты разгона из неподвижного состояния, ошибка достигает пика и становится больше теоретического значения, но все же не превышает регламент. Таким образом, регулятор обеспечивает заданный регламент, и нет необходимости менять его структуру. ЗАКЛЮЧЕНИЕ По результатам расчета были выбраны следующие силовые компоненты привода механизма подъема/опускания груза промышленного робота: двигатель – МИГ-600А и редуктор – ET3010 с передаточным отношением 211,4. Данные силовые компоненты были выбраны с расчетом на программную траекторию рисунка 2.2, лишенную участков принудительного разгона и торможения. После коррекции был получен регулятор (3.9). Скорректированные показатели системы отражены в таблице 5.1.
Таблица 5.1 – Параметры скорректированной системы
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1 Подлинева, Т.К. Проектирование управляемого электропривода: учебное пособие. – Челябинск: Изд-во ЮУрГУ, 2005. – 60 с. 2 Бесекерский, В.А., Попов, Е.П. Теория систем автоматического управления / В.А. Бесекерский, Е.П. Попов. – Изд. 4-е, перераб и доп. – СПб: Изд-во «Профессия», 2003. – 752 с. 3 http://www.brevini-russia.ru/gear/info/32 4 http://www.industrialcom.ru/datchiki_izmeritelnye/datchiki_peremescheniya/sinhronnyy_datchik_skorosti_i_polozheniya_trosikovyy_serii_vp
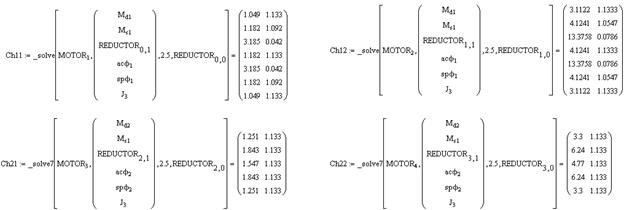
ПРИЛОЖЕНИЕ А РАСЧЕТЫ MATHCAD 1 Расчет рабочей нагрузки
Продолжение приложения А 2 Определение передаточного отношения редуктора
Продолжение приложения А
3 Проверка пары двигатель-редуктор на нагрев
Продолжение приложения А
Продолжение приложения А
4 Получение передаточных функций двигателя постоянного тока
Продолжение приложения А
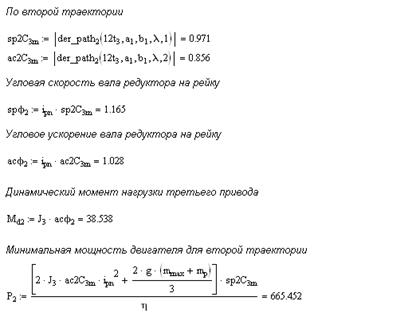
5 Проверка ошибок скорректированной системы
Продолжение приложения А
ПРИЛОЖЕНИЕ Б ЛОГАРИФМИЧЕСКИЕ АМПЛИТУДНО-ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
ПРИЛОЖЕНИЕ В ПАСПОРТНЫЕ ДАННЫЕ РЕДУКТОРА ET3010
ПРИЛОЖЕНИЕ Г ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
























 (продолжение справа)
(продолжение справа)