|
|
ЭНЕРГЕТИЧЕСКИЙ РАСЧЕТ ПРИВОДАСтр 1 из 4Следующая ⇒ ВВЕДЕНИЕ Эффективность средств производства, которыми располагает человеческое общество, в значительной степени определяется совершенством способов получения энергии, необходимой для выполнения механической работы в производственных процессах. Производственные механизмы, без которых нельзя в настоящее время представить ни одно производство, прошли длительный путь своего развития, прежде чем принять вид современного автоматизированного электропривода, приводящего в движение бесчисленное множество рабочих машин и механизмов в промышленности, транспорте, в сельском хозяйстве и в бытовой технике и управляющего их технологическими процессами. Современный автоматизированный электропривод представляет собой сложную электромеханическую систему, предназначенную для приведения в движение рабочего органа машины и управления технологическим процессом. Он состоит из трех частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, предающей механическую энергию рабочему органу машины, и системы управления (регулирования), обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом. Многообразие производственных процессов обуславливает различные виды и характеры движения рабочих органов машины, а, следовательно, и электроприводов. По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное движение и поступательное реверсивное движение. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций. Свойства электромеханической системы оказывают решающее влияние на важнейшие показатели рабочей машины и в значительной мере определяют качество и экономическую эффективность технологических процессов. Развитие автоматизированного электропривода ведет к совершенствованию конструкций машин, к коренным изменениям технологических процессов, к дальнейшему прогрессу во всех отраслях народного хозяйства, поэтому теория автоматизированного электропривода – техническая наука, изучающая общие свойства электромеханических систем, законы управления их движением и способы синтеза таких систем по заданным показателям, – имеет важнейшие практическое значение. ПОСТАНОВКА ЗАДАЧИ Необходимо произвести расчет электрического привода и его системы регулирования, предназначенного для программного управления линейным перемещением механизма подъема промышленного робота. Механизм подъема осуществляет поступательное перемещение зажатого в захватывающем механизме груза, посредством зубчато-реечной передачи, движимой двигателем постоянного тока (далее ДПТ). На рисунке 1.1 показан механизм подъема.
Рисунок 1.1 – Механизм подъема промышленного робота На рисунке 1.1 цифрами показана ось вращения 3–3 ДПТ механизма подъема, механизм захвата 4, рейка 5, зубчатая шестерня 6. Перемещение зажатого груза осуществляется по некоторому закону C3(t). Отметим, что данный промышленный робот работает по некоторой программе, состоящей из нескольких составляющих ее этапов. Подъем и опускание груза это один из этапов его программы. Робот выполняет программу периодически, и каждый такой период принято называть циклом. Цикл характеризуется своей продолжительностью Tц. В данной постановке задачи нам не требуется знать весь цикл, а необходимо лишь рассмотреть ту часть, которая приходится на этапы подъема и опускания груза. В соответствии с режимами работы привода механизма подъема и опускания в цикле, необходимо выбрать компоненты привода и подобрать параметры так, чтобы удовлетворить требованиям множества критериев, которые будут рассмотрены ниже в разных частях данной курсовой работы, а также исходным данным. Исходные данные, необходимые для расчета электрического привода механизма подъема и опускания, приведены в таблице 1.1.
Таблица 1.1 – Исходные данные
В таблице 1.1 приняты следующие условные обозначения: - C3m [м] – максимальное значение траектории (максимальная высота опускания/подъема груза); - mp [кг] – масса рейки; - mmin, mmax [кг] – пределы массы поднимаемого/опускаемого груза; - h – минимальный КПД редуктора; - ipn – передаточное отношение зубчато-реечной передачи; - ky – коэффициент усилителя мощности; - Tm [с] – постоянная времени усилителя мощности; - eст % – относительная статическая ошибка системы регулирования; - eд % – относительная динамическая ошибка системы регулирования; - s % – максимальное перерегулирование; - tп [c] – максимальное время переходного процесса системы регулирования. К исходным данным причисляется и закон С3(t), который может быть описан системой алгебраических уравнений. В данной постановке задачи рабочий цикл данного робота известен и представлен в виде двух аппроксимаций. На рисунке 1.2 показаны моменты времени, в которые работает механизм подъема и опускания груза, первого варианта рабочего цикла, а на рисунке 1.3 – второго.
Рисунок 1.2 – Первый вариант рабочего цикла
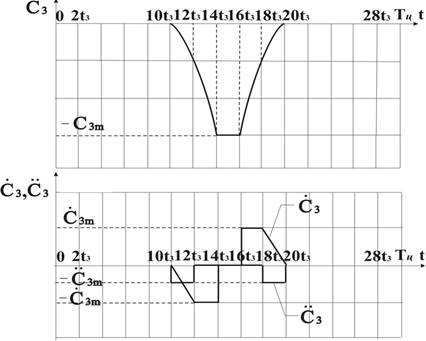
Рисунок 1.3 – Второй вариант рабочего цикла График закона С3(t) рисунка 1.2, который принято называть траекторией, строится через следующую систему алгебраических уравнений
Система уравнений траектории рисунка 1.3
Отметим, что помимо самой траектории также изображены первая и вторая производные траектории. В совокупности они дают исчерпывающее представление о режимах работы электропривода в определенные моменты времени. Следующим необходимым шагом является определение параметров систем алгебраических уравнений (1.1) и (1.2). Также отметим, что в данной постановке задачи представленные траектории являются возможными вариантами одной и той же программы робота. Впоследствии на одном из этих вариантов придется остановиться.
Расчет рабочей нагрузки При расчете нагрузки вводят упрощающую модель, показанную на рисунке 2.3. В этой модели нагрузка заменена эквивалентным вращающимся маховиком, который отделен от приводного двигателя приводным редуктором.
Рисунок 2.3 – Расчетная модель привода Со стороны нагрузки в этой модели следует найти динамический момент нагрузки Mдин и статический момент нагрузки Мст. Динамический момент нагрузки может быть найден по следующей формуле
где
Момент инерции для зубчато-реечной передачи определяется так
Подставляя в (2.2) границы интервала по массе из таблицы 1.1, получаем границы изменения момента инерции. Переход от линейных перемещений рейки к вращательным движениям вала осуществляется по формулам
Величина статического момента в большей степени зависит от конструктивных особенностей. В механизме подъема и опускания данного робота предлагается использование пружинных уравновешивателей [1, с. 22]. Тогда статический момент определится по формуле
Без вывода формула, получаемая из моментов (2.1) и (2.5), для выбора мощности двигателя выглядит так [1, с. 24]
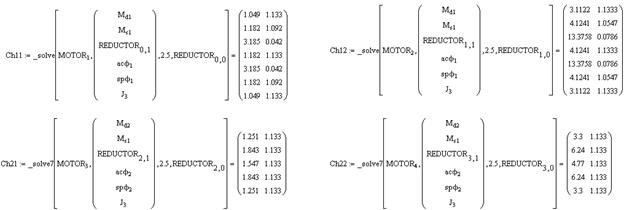
где g – ускорение свободного падения ( Так как подстановка известных значений в формулы – задача тривиальная, то весь численный расчет выведен в приложение А 1. Здесь мы лишь ограничимся сводной таблицей. В таблицу 2.2 выведены все интересующие нас значения из приложения по двум траекториям.
Таблица 2.2 – Сводная таблица по рабочей нагрузке
Выбор рабочей траектории Итак, мы получили 4 работоспособных привода: по два на каждую траекторию. Окончательно выберем одну из траекторий, для которой будем синтезировать систему регулирования. Для начала следует отметить, что выше мы доказали, что траекторию, задаваемую системой (1.1), реализовать в таком виде, котором она задана формально, физически невозможно. При переходе со второго участка на третий и с третьего на четвертый мы вынуждены искусственно внедрять участки интенсивного торможения и разгона, чтобы «обойти» физические ограничения, что в свою очередь видоизменяют траекторию движения в точках стыковки этих участков (см. рисунки 2.8 и 2.9). Кроме того, работа двигателя в режиме сверх номинального, сокращает срок его службы: превышение номинального тока негативно влияет на жилы проводов и изоляцию обмоток, увеличивает разогрев корпуса и механические напряжения на корпус за счет магнитных полей, увеличивает нагрузку на коллектор за счет искра образований, увеличивает износ подшипников и т.д. Второй вариант траектории имеет несколько плавный вид, однако, он полностью физически реализуем в своем формальном виде и не требует от двигателя работы в сверх номинальном режиме. Поэтому среди этих двух вариантов, при отсутствии требований на плавность, следует выбрать второй, так как выигрыш от этого варианта, несомненно, больше. Так как мы имеем по два двигателя на каждый вариант, следует выбрать наиболее экономичный. По паспортным данным масса редуктора ET3010 не зависит от передаточного числа, поэтому правильнее всего осуществлять выбор относительно приводного двигателя. Анализируя таблицу 2.3, можно заметить, что МИГ-600А обладает меньшей мощностью, меньшим моментом инерции, меньшей массой, чем 2ПН100LГУХЛ4. Кроме того, по таблице 2.7 эквивалентный момент МИГ-600А намного меньше, чем 2ПН100LГУХЛ4, т.е. МИГ-600А экономичнее в плане энергопотребления, чем 2ПН100LГУХЛ4, при выполнении одних и тех же функций. Датчик линейных перемещений Датчик линейных перемещений фиксирует текущее положение рейки и передает сигнал в виде напряжения на элемент сравнения. Его выбор производят на основании требуемой статической ошибки системы. Эмпирически доказано, что доля ошибки измерения датчиков от всей ошибки системы составляет
Тогда, воспользовавшись таблицей 1.1, мы должны выбрать такой датчик, ошибка которого не должна превышать
Кроме того, выбираемый датчик должен удовлетворять по измеряемому диапазону и должен поддерживать скорости, на которых перемещается рейка. Выбор датчика будем осуществлять среди тросиковых датчиков. Для целей регулирования вполне подходит датчик серии VP UniMesure. Согласно паспортным данным [4], данный датчик имеет диапазон до 1250 мм, что покрывает размер рейки (1100 мм). Ошибка измерения при этом составляет 0,1% от диапазона измерения, т.е.
Очевидно, что датчик обладает удовлетворительной точностью. Согласно паспортным данным, тросик способен выдерживать перегрузки больше 50g, что удовлетворяет требованиям таблицы 2.1. В приложение Г сведены основные паспортные данные выбранного датчика. Синтез регулятора На рисунке 3.4 представлена структурная схема системы. В ней, помимо двигателя, также присутствует модель редуктора, коэффициент, учитывающий реечную передачу, усилитель мощности, датчик обратной связи и регулятор. Датчик обратной связи представлен в виде усилительного звена с коэффициентом усиления 10 В/м.
Рисунок 3.4 – Структурная схема системы с учетом переменной структуры приводного двигателя
В приложении Б построены располагаемые ЛАЧХ по (3.6). В первую очередь обеспечим регламентируемые ошибки таблицы 1.1, скорректировав низкочастотный участок. Для обеспечения требуемой динамической ошибки системы, достаточно вывести располагаемые ЛАЧХ из запретной области, определяемой по контрольной точке. Координата контрольной по оси частот будет равна
Координата по оси амплитудного рассогласования
Очевидно, что при такой структуре система находится в запретной области и необходимо повышать коэффициент усиления разомкнутой системы минимум до 44 дБ. Однако, чтобы наверняка обеспечить статическую ошибку, мы можем взять еще больший коэффициент, например 50 дБ. Для обеспечения перерегулирования необходимо выдержать протяженность среднечастотного участка. Воспользуемся методом Бесекерского [2]. Пользуясь таблицей соответствия, для обеспечения перерегулирования в 18% необходимо, чтобы система имела показатель колебательности Отложим вверх и вниз линии уровня, определяющие протяженность,
Воспользовавшись [2, с. 377] можно прикинуть переходный процесс и сделать оценку. По оценке время переходного процесса менее 1 секунды. Тем не менее, следует стараться делать частоту среза как можно больше левее, чтобы не увеличивать влияния шумов и не уменьшать запасы устойчивости. Этого можно добиться, если искусственно включить апериодическое звено на низкочастотном участке. Другой проблемой является переменная структура неизменяемой части системы. Так как регулятор будет обладать постоянной структурой, то нет возможности обеспечить одинаковое качество регулирования для всего диапазона возможной нагрузки, однако, можно добиться удержания прямых показателей в заданных пределах. Для этого следует выбрать оптимальную точку включения регулятора на среднечастотном участке, в момент, когда начинаются отличия между случаями. Мысленно попытаемся представить ситуацию, когда регулятор в большей степени корректирует максимальную нагрузку. В этом случае относительно минимальной нагрузки образуется участок наклоном в 0 дБ/дек, который искусственно сдвигает частоту среза направо, ухудшая прямые показатели качества системы. В обратном случае, относительно максимальной нагрузки будет образовываться участок с наклоном -40 дБ/дек, который также ухудшает прямые показатели качества. Так как мы точно не знаем, как это влияние проявляется для максимальной и для минимальной нагрузки, и в полной степени это может быть исследовано на этапе моделирования, выберем момент включения, который бы уменьшил продолжительность нежелательного участка в равной степени для обоих краевых случаев. Среднечастотный участок будем продолжать до частоты сопряжения апериодического звена усилителя мощности, а затем повторять располагаемые ЛАЧХ, специально не корректируя высокочастотный участок. Таким образом, действительные ЛАЧХ (приложение Б) разомкнутой системы выстроятся со следующими постоянными времени (таблица 3.1). Коэффициент усиления разомкнутой скорректированной системы будет равен
Таблица 3.1 – Постоянные времени скорректированной системы
Общий вид передаточной функции регулятора, полученной путем графического вычитания (приложение Б), примет вид
где K = 19,513. После подстановки значений из таблицы 3.1, передаточная функция регулятора окончательно примет вид
На рисунке 3.5 показана структурная схема скорректированной системы с учетом (3.8).
Рисунок 3.5 – Структурная схема скорректированной системы ЗАКЛЮЧЕНИЕ По результатам расчета были выбраны следующие силовые компоненты привода механизма подъема/опускания груза промышленного робота: двигатель – МИГ-600А и редуктор – ET3010 с передаточным отношением 211,4. Данные силовые компоненты были выбраны с расчетом на программную траекторию рисунка 2.2, лишенную участков принудительного разгона и торможения. После коррекции был получен регулятор (3.9). Скорректированные показатели системы отражены в таблице 5.1.
Таблица 5.1 – Параметры скорректированной системы
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1 Подлинева, Т.К. Проектирование управляемого электропривода: учебное пособие. – Челябинск: Изд-во ЮУрГУ, 2005. – 60 с. 2 Бесекерский, В.А., Попов, Е.П. Теория систем автоматического управления / В.А. Бесекерский, Е.П. Попов. – Изд. 4-е, перераб и доп. – СПб: Изд-во «Профессия», 2003. – 752 с. 3 http://www.brevini-russia.ru/gear/info/32 4 http://www.industrialcom.ru/datchiki_izmeritelnye/datchiki_peremescheniya/sinhronnyy_datchik_skorosti_i_polozheniya_trosikovyy_serii_vp
ПРИЛОЖЕНИЕ А РАСЧЕТЫ MATHCAD 1 Расчет рабочей нагрузки
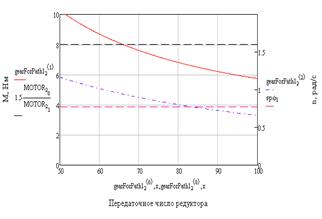
Продолжение приложения А 2 Определение передаточного отношения редуктора
Продолжение приложения А
3 Проверка пары двигатель-редуктор на нагрев
Продолжение приложения А
Продолжение приложения А
4 Получение передаточных функций двигателя постоянного тока
Продолжение приложения А
5 Проверка ошибок скорректированной системы
Продолжение приложения А
ПРИЛОЖЕНИЕ Б ЛОГАРИФМИЧЕСКИЕ АМПЛИТУДНО-ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
ПРИЛОЖЕНИЕ В ПАСПОРТНЫЕ ДАННЫЕ РЕДУКТОРА ET3010
ПРИЛОЖЕНИЕ Г ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
ВВЕДЕНИЕ Эффективность средств производства, которыми располагает человеческое общество, в значительной степени определяется совершенством способов получения энергии, необходимой для выполнения механической работы в производственных процессах. Производственные механизмы, без которых нельзя в настоящее время представить ни одно производство, прошли длительный путь своего развития, прежде чем принять вид современного автоматизированного электропривода, приводящего в движение бесчисленное множество рабочих машин и механизмов в промышленности, транспорте, в сельском хозяйстве и в бытовой технике и управляющего их технологическими процессами. Современный автоматизированный электропривод представляет собой сложную электромеханическую систему, предназначенную для приведения в движение рабочего органа машины и управления технологическим процессом. Он состоит из трех частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, предающей механическую энергию рабочему органу машины, и системы управления (регулирования), обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом. Многообразие производственных процессов обуславливает различные виды и характеры движения рабочих органов машины, а, следовательно, и электроприводов. По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное движение и поступательное реверсивное движение. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций. Свойства электромеханической системы оказывают решающее влияние на важнейшие показатели рабочей машины и в значительной мере определяют качество и экономическую эффективность технологических процессов. Развитие автоматизированного электропривода ведет к совершенствованию конструкций машин, к коренным изменениям технологических процессов, к дальнейшему прогрессу во всех отраслях народного хозяйства, поэтому теория автоматизированного электропривода – техническая наука, изучающая общие свойства электромеханических систем, законы управления их движением и способы синтеза таких систем по заданным показателям, – имеет важнейшие практическое значение. ПОСТАНОВКА ЗАДАЧИ Необходимо произвести расчет электрического привода и его системы регулирования, предназначенного для программного управления линейным перемещением механизма подъема промышленного робота. Механизм подъема осуществляет поступательное перемещение зажатого в захватывающем механизме груза, посредством зубчато-реечной передачи, движимой двигателем постоянного тока (далее ДПТ). На рисунке 1.1 показан механизм подъема.
Рисунок 1.1 – Механизм подъема промышленного робота На рисунке 1.1 цифрами показана ось вращения 3–3 ДПТ механизма подъема, механизм захвата 4, рейка 5, зубчатая шестерня 6. Перемещение зажатого груза осуществляется по некоторому закону C3(t). Отметим, что данный промышленный робот работает по некоторой программе, состоящей из нескольких составляющих ее этапов. Подъем и опускание груза это один из этапов его программы. Робот выполняет программу периодически, и каждый такой период принято называть циклом. Цикл характеризуется своей продолжительностью Tц. В данной постановке задачи нам не требуется знать весь цикл, а необходимо лишь рассмотреть ту часть, которая приходится на этапы подъема и опускания груза. В соответствии с режимами работы привода механизма подъема и опускания в цикле, необходимо выбрать компоненты привода и подобрать параметры так, чтобы удовлетворить требованиям множества критериев, которые будут рассмотрены ниже в разных частях данной курсовой работы, а также исходным данным. Исходные данные, необходимые для расчета электрического привода механизма подъема и опускания, приведены в таблице 1.1.
Таблица 1.1 – Исходные данные
В таблице 1.1 приняты следующие условные обозначения: - C3m [м] – максимальное значение траектории (максимальная высота опускания/подъема груза); - mp [кг] – масса рейки; - mmin, mmax [кг] – пределы массы поднимаемого/опускаемого груза; - h – минимальный КПД редуктора; - ipn – передаточное отношение зубчато-реечной передачи; - ky – коэффициент усилителя мощности; - Tm [с] – постоянная времени усилителя мощности; - eст % – относительная статическая ошибка системы регулирования; - eд % – относительная динамическая ошибка системы регулирования; - s % – максимальное перерегулирование; - tп [c] – максимальное время переходного процесса системы регулирования. К исходным данным причисляется и закон С3(t), который может быть описан системой алгебраических уравнений. В данной постановке задачи рабочий цикл данного робота известен и представлен в виде двух аппроксимаций. На рисунке 1.2 показаны моменты времени, в которые работает механизм подъема и опускания груза, первого варианта рабочего цикла, а на рисунке 1.3 – второго.
Рисунок 1.2 – Первый вариант рабочего цикла
Рисунок 1.3 – Второй вариант рабочего цикла График закона С3(t) рисунка 1.2, который принято называть траекторией, строится через следующую систему алгебраических уравнений
Система уравнений траектории рисунка 1.3
Отметим, что помимо самой траектории также изображены первая и вторая производные траектории. В совокупности они дают исчерпывающее представление о режимах работы электропривода в определенные моменты времени. Следующим необходимым шагом является определение параметров систем алгебраических уравнений (1.1) и (1.2). Также отметим, что в данной постановке задачи представленные траектории являются возможными вариантами одной и той же программы робота. Впоследствии на одном из этих вариантов придется остановиться.
ЭНЕРГЕТИЧЕСКИЙ РАСЧЕТ ПРИВОДА   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|





 (1.1)
(1.1)





 (1.2)
(1.2)


 (2.1)
(2.1) – момент инерции нагрузки;
– момент инерции нагрузки; – максимальное ускорение вращения вала нагрузки.
– максимальное ускорение вращения вала нагрузки. (2.2)
(2.2) (2.3)
(2.3) (2.4)
(2.4) (2.5)
(2.5) (2.6)
(2.6) ).
). ,
рад/с
,
рад/с
 . (3.6)
. (3.6)
 .
.
 Представим на плоскости располагаемую ЛАЧХ неизменяемой части системы. Так как система переменной структуры, то на плоскости, вообще говоря, образуется множество из располагаемых ЛАЧХ. Представим краевые случаи с учетом (3.5).
Представим на плоскости располагаемую ЛАЧХ неизменяемой части системы. Так как система переменной структуры, то на плоскости, вообще говоря, образуется множество из располагаемых ЛАЧХ. Представим краевые случаи с учетом (3.5). (3.7)
(3.7)

 .
.

 , (3.8)
, (3.8) . (3.9)
. (3.9)
















 (продолжение справа)
(продолжение справа)