
|
|
Вопрос 3. Фундаментальные принципы автоматического управления.Стр 1 из 2Следующая ⇒ Вопрос1. Основные понятия и определения. Коряжкин Андрей Александрович доцент кафедры «Станки и инструменты» Автоматика – наука, изучающая общие принципы построения и функционирования систем. Автоматизация – это процесс перехода устройств систем комплексов в автоматические (дверной замок – уходя провернуть ключ, автоматизация когда замок захлопывается сам). Автоматизация может быть полной или частичной, а также может быть дискретной или непрерывной. При дискретной автоматизации все элементы имеют 2(3) состояния: вкл-выкл вперед-стоп-назад. При непрерывной автоматизации устройства имеют множество значений. Теория автоматического управления изучает непрерывные процессы. Управление – это совокупность действий выбранных на основе определенной информации и направленных на поддержание или улучшение функционирования объекта, в соответствии с имеющейся целью или в соответствии с целью функционирования. В автоматике различают два вида алгоритмов: управления и функционирования. Алгоритм функционирования – это совокупность правил, предписаний, математических зависимостей, ведущих к правильному протеканию рабочего процесса в объекте управления. Алгоритм управления – это совокупность правил, предписаний, математических зависимостей, определяющих воздействие на управляющий объект с целью осуществления им заданного алгоритма функционирования. Объект – это устройство или процесс. В управлении неразделимо решаются две задачи: 1. Анализа – определения характера движения при известной (существующей) системе управления и разных условиях (возмущениях); 2. Синтеза – создания системы управления, обеспечивающей при разных условиях заданное движение объекта. Вопрос 2. Общая структура систем автоматического управления В общем случае на управляемый объект действуют Управляющие воздействия U Возмущающее воздействие F X – выходные (управляемые) параметры Всех этих параметров может быть много тогда общая структура САУ может быть изображена в виде
Пример 1 Станок с ЧПУ Управляемыми координатами, параметрами являются: частота вращения шпинделя, перемещение рабочего органа станка вдоль координат (их величина, скорость) Управляющие воздействия по назначению совпадают с управляемыми координатами но заданы в числовой форме. Возмущающимися воздействиями являются: изменения действующих сил, температур, напряжения питающей сети и т.д. Пример 2. Процесс резания Выходными параметрами являются: силы резания, температуры в зоне резания, вибрации, деформации упругой системы, износ инструмента и т.д. Управляющие воздействия: скорость вращения шпинделя, подача, глубина резания, геометрия инструмента. Возмущающимися воздействиями являются: изменения припуска, твердости заготовки, износ инструмента. Если в объекте управления нет связи между выходными параметрами т.е. они друг на друга не влияют, и каждому управляемому параметру соответствует одно управляющее воздействие, то такую систему можно разделить на совокупность одномерных систем. Анализ и проектирование таких систем значительно упрощается. Система примера 1 – одномерная, система примера 2 – многомерная. В зависимости от физической природы математические зависимости связывающие U,F,x могут быть различными. Если рассматривается установившийся процесс, то иннерционность элементов системы уже не влияет, говорят о поведении системы в статике. Такая система описывается линейными и не линейными алгебраическими уравнениями. Если рассматриваем переходный процесс системы из одного состояния в другое, то необходимо учитывать инерционность элементов системы. Такая система описывается дифференциальными уравнениями. Вопрос 3. Фундаментальные принципы автоматического управления. Сейчас используют 3 фундаментальных принципа управления, они могут использоваться по отдельности или в различных комбинациях, тогда управление называют комбинированным. Построение САУ базируется на 3-х основных принципах: · Разомкнутого управления · Управления по возмущению (принцип компенсации) · Управление по отклонению (принцип обратной связи) Пример Найти АЧХ и АФХ по известной передаточной функции системы
Решение Если записать
гле
Найдем
т.е имеем
ВЧХ
МЧХ АЧХ
ФЧХ
Определив сигнал X2(t) на выходе системв1 по известному входному сигналу и передаточной функции системы
Решение. Известно, что при воздействии входного сигнала переходного процесса также будет гармоническим, но отличается от входного амплитудой и фазой
где
Следовательно для определения X2(t) необходимо найти Аналогично предыдущему примеру найдем АЧХ
ФЧХ
Тогда на частоте
Вопрос № Логарифмические частотный характеристики (ЛЧА) Широкое применение получили так же логарифмически частотные хар-ки – это основные амплитудные и фазовые частотные характеристики, но построенные с применением логарифмических масштабов. По горизонтальной оси откладывается частота в логарифмическом масштабе, вертикальная ось проводят в любом месте так, что бы она и ее оцифровка не скрывала важных частей графика. Амплитуды откладываются также в логарифмическом масштабе в децибелах. Рассчитывается амплитуда по формуле Фазу откладывают в обычном пропорциональном масштабе ЛАЧХ – логарифмическая амплитудно-частотная хар-ка ЛФЧХ – логарифмическая фазовая частотная хар-ка
Преимущество ЛАЧХ является хорошая прорисовка как верхних так и нижних частот, кроме это их удобство является то что лагорифмические частотные характеристики системы последлвательно соедтненных звеньев получаются суммированием их ЛЧХ В математической форме выглядит
Устойчивость систем автоматического управления Критерий устойчивости Устойчивость – это свойство автоматической замкнутой системы возвращается в исходное состояние после вывода ее из этого состояния и прекращения возмущающего воздействия. Необходимым и достаточным условием устойчивости линейных систем является отрицательность вещественных частей всех корней ее характеристического уровнения. Для устойчивости системы переходные процессы насят сходящийся характер Почти все реальные системы содержат нелинейные элементы и потому являются также нелинейными. В результате линеаризации они приближенно описываются линейными уравнениями. Обоснование допустимости суждения об устойчивости реальной системы по характеристическому уравнению дал русский ученый А.М. Ляпунов он доказал 1. Если линеаризованная система устойчива то устойчива и исходная реальная система 2. Если линеаризованная система неустойчива, то и неустойчива исходная нелинейная система
Корни характеристического уравнения устойчивости автоматической системы имеют вид
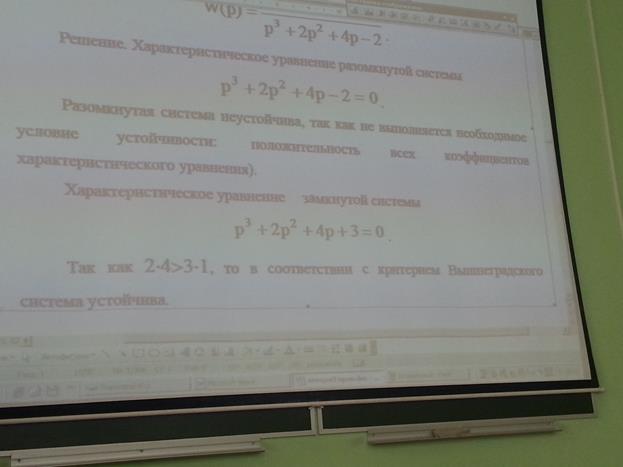
Если изобразить корни характеристического уравнения на комплексной плоскости, то для устойчивости системы все корни расположаться в левой плоскости Нахождение корней становится сложной задачей. чтобы обойти вопрос о корнях уравнения. В ТАУ нашил применение различные критерии устойчивости. Критерий устойчивости представляет собой математически обоснованные правила позволяющие анализировать устойчивость без решения характеристического уравнения системы. Критерий устойчивости Вышнеградского преминем для систем 3-го порядка
Пример
Критерий устойчивости Михайлова
Для того, чтобы система была устойчивой, необходимо, чтобы на частоте, при которой ее логарифмическая амплитудно-частотная характеристика равна 0 (частота среза), запаздывание по фазе было меньше 180 градусов Преимущества анализа по логарифмическим частотным характеристикам являются: 1. Быстрота построения в том случае, когда разомкнутая система состоит из последовательно соединённых типовых звеньев 2. Возможность введения понятия запасов устойчивости. Их два – по амплитуде и по фазе. Запас устойчивости по амплитуде (L3) – это расстояние в дб от ЛАЧХ до горизонтальной оси на частоте, при которой фазовое запаздывание равно 180 градусам Запас устойчивости по фазе (ϕэ) – это (в градусах) Φэ = 180+ϕ(ω) При частоте на которой L(ω) = 0, т.е. на частоте среза. Критерий устойчивости Рауса-Гурвица Применим для систем любого порядка. Условия устойчивости запишутся в форму определителей, составленных из коэффициентов характеристического уравнения. Основной определитель имеет n строк и n столбцов. Он составляется следующим образом
По главной диагонали выписываются коэффициенты с возрастающими нидексами, далее, правее главной диагонали, все строки заполняются коэффициентами по убывающим индексам, левее- по возрастающим. Пустые места заполняются нулями. Из определителя Система с характеристическим уравнением вида
Будет устойчивой если при
В конечном итоге раскрытие определителей приводит к выражениям в форме неравенств записанных относительно коэффициентов уравнения. Громоздкость, расчетов по критерию Рауса-Гурвица быстро нарастает с увеличением порядка n характеристичного уравнения. Поэтому его применение при ручных расчетах целесообразно для систем с порядком уравнения Оценка запасов устойчивости Осуществляется с помощью АФЧХ разомкнутой системы, как и в случае критерия устойчивости Найквиста. Запас устойчивости замкнутой системы характеризуется степенью удаления годографа АФЧХ разомкнутой системы от «опасной» точки (-1. j0). Колличественно степень удаления можно определить при помощи двух неотрицательных чисел: l и γ число 1 называется запасом устойчивости системы по амплитуде. γ- запас устойчивости по фазе. В общем случае ни одно из чисел 1 и γ взятое в отдельности, не может служить количественной мерой запаса устойчивости. Запас устойчивости по амплитуде и фазе всегда рассматривается совместно. Причем
Угол γ на рис дает точка пересечения годографа с окружностью единичного радиуса на частоте ωср, которая получила название частоты среза. Типовые динамические звенья Получая передаточные функции различных по конструкции и назначению элементов САУ. Было замечено, что их динамику отображают ограниченное число своеобразных «кирпичиков». Оказалось возможным разделить структурные схемы элементов систем на отдельные динамические звенья. Каждое такое типовое звено отражает в структурной схеме какую-либо одну особенность поведения элемента в динамике, например, колебательность, инерционность, запаздывание и т.п. типовые звенья своими сочетаниями позволяют обрисовавывать динамику любой автоматической системы. Зная из каких типовых звеньев состоит структурная схема, можно уверенно прогнозировать ее качественное поведение в динамике. К типовым звеньям относят: усилительное, иннерционное колебательное, интегрирующие, дифферинцирующее звенья, а так же звено с постоянным транспортным запаздыванием. Тип звена однозначно определяется видо передаточной фугкции. Поэтому звенья отличаются своей реакцией на входное ступенчатое воздействие, причем реакция звена на входное ступенчатое воздействие в виде единичной ступенчатой функции времени хвк(t) = i(t) называется переходной функцией или характеристикой.
Вопрос1. Основные понятия и определения. Коряжкин Андрей Александрович доцент кафедры «Станки и инструменты» Автоматика – наука, изучающая общие принципы построения и функционирования систем. Автоматизация – это процесс перехода устройств систем комплексов в автоматические (дверной замок – уходя провернуть ключ, автоматизация когда замок захлопывается сам). Автоматизация может быть полной или частичной, а также может быть дискретной или непрерывной. При дискретной автоматизации все элементы имеют 2(3) состояния: вкл-выкл вперед-стоп-назад. При непрерывной автоматизации устройства имеют множество значений. Теория автоматического управления изучает непрерывные процессы. Управление – это совокупность действий выбранных на основе определенной информации и направленных на поддержание или улучшение функционирования объекта, в соответствии с имеющейся целью или в соответствии с целью функционирования. В автоматике различают два вида алгоритмов: управления и функционирования. Алгоритм функционирования – это совокупность правил, предписаний, математических зависимостей, ведущих к правильному протеканию рабочего процесса в объекте управления. Алгоритм управления – это совокупность правил, предписаний, математических зависимостей, определяющих воздействие на управляющий объект с целью осуществления им заданного алгоритма функционирования. Объект – это устройство или процесс. В управлении неразделимо решаются две задачи: 1. Анализа – определения характера движения при известной (существующей) системе управления и разных условиях (возмущениях); 2. Синтеза – создания системы управления, обеспечивающей при разных условиях заданное движение объекта. Вопрос 2. Общая структура систем автоматического управления В общем случае на управляемый объект действуют Управляющие воздействия U Возмущающее воздействие F X – выходные (управляемые) параметры Всех этих параметров может быть много тогда общая структура САУ может быть изображена в виде
Пример 1 Станок с ЧПУ Управляемыми координатами, параметрами являются: частота вращения шпинделя, перемещение рабочего органа станка вдоль координат (их величина, скорость) Управляющие воздействия по назначению совпадают с управляемыми координатами но заданы в числовой форме. Возмущающимися воздействиями являются: изменения действующих сил, температур, напряжения питающей сети и т.д. Пример 2. Процесс резания Выходными параметрами являются: силы резания, температуры в зоне резания, вибрации, деформации упругой системы, износ инструмента и т.д. Управляющие воздействия: скорость вращения шпинделя, подача, глубина резания, геометрия инструмента. Возмущающимися воздействиями являются: изменения припуска, твердости заготовки, износ инструмента. Если в объекте управления нет связи между выходными параметрами т.е. они друг на друга не влияют, и каждому управляемому параметру соответствует одно управляющее воздействие, то такую систему можно разделить на совокупность одномерных систем. Анализ и проектирование таких систем значительно упрощается. Система примера 1 – одномерная, система примера 2 – многомерная. В зависимости от физической природы математические зависимости связывающие U,F,x могут быть различными. Если рассматривается установившийся процесс, то иннерционность элементов системы уже не влияет, говорят о поведении системы в статике. Такая система описывается линейными и не линейными алгебраическими уравнениями. Если рассматриваем переходный процесс системы из одного состояния в другое, то необходимо учитывать инерционность элементов системы. Такая система описывается дифференциальными уравнениями. Вопрос 3. Фундаментальные принципы автоматического управления. Сейчас используют 3 фундаментальных принципа управления, они могут использоваться по отдельности или в различных комбинациях, тогда управление называют комбинированным. Построение САУ базируется на 3-х основных принципах: · Разомкнутого управления · Управления по возмущению (принцип компенсации) · Управление по отклонению (принцип обратной связи)   Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|


 ,
, - действительная часть;
- действительная часть; - мнимая часть, то АЧХ и ФЧХ определяются соответственно по формулам
- мнимая часть, то АЧХ и ФЧХ определяются соответственно по формулам

 и избавимся от мнимого выражения в знаменателе, что позволит записать АФЧХ в алгебраической форме
и избавимся от мнимого выражения в знаменателе, что позволит записать АФЧХ в алгебраической форме






 на систему выходной сигнал X2(t) по истечении времени
на систему выходной сигнал X2(t) по истечении времени (18)
(18) - АЧХ системы;
- АЧХ системы; - ФЧХ системы.
- ФЧХ системы.
 =10
=10




 где
где  и
и  - соответственно вещественная и мнимая части корня.
- соответственно вещественная и мнимая части корня.
















 последовательным вычеркиванием крайних левых столбцов и верхних строк получают еще
последовательным вычеркиванием крайних левых столбцов и верхних строк получают еще  определитель
определитель  . Причем
. Причем 

 все n определителей положительны т.е.
все n определителей положительны т.е.
 (на ЭВМ могут быть расчитаны системы любого порядка.)
(на ЭВМ могут быть расчитаны системы любого порядка.)
