
|
|
ТЕМА 6. Исследование качества управления. ⇐ ПредыдущаяСтр 3 из 3 Требования к переходному процессу системы управления. Прямые показатели качества системы. Косвенные методы исследования качества систем управления. Точность в типовых режимах. Коэффициенты ошибок. Определение запаса устойчивости и быстродействия по переходной характеристике. Корневые методы. Диаграмма Вышнеградского. Интегральные оценки качества. Частотные критерии качества. Методические указания. Студент должен познакомиться с критериями качества переходных процессов, которые делятся на группы: критерии точности; критерии, определяющие запас устойчивости; быстродействие систем; интегральные оценки. Прямые показатели качества позволяют оценить качество регулирования непосредственно по кривой переходного процесса: статическая ошибка, динамическая ошибка, степень затухания, перерегулирование. Косвенные показатели позволяют определить степень устойчивости, степень колебательности системы. Для оценки точности системы управления используется величина ошибок в типовых режимах: неподвижное состояние, движение с постоянной скоростью, движение по гармоническому (синусоидальному) закону. Для определения степени устойчивости системы студент должен изучить корневые методы и диаграмму Вышнеградского, которые позволяют иметь более полное суждение о быстродействии и запасе устойчивости системы управления. Интегральные критерии качества позволяют дать оценку быстроты затухания и величины отклонения управляемой величины в совокупности, без определения того и другого в отдельности. Вопросы для самопроверки 1. Определите связь степени затухания и степени колебательности. 2. Сформулируйте понятие величины ошибок в различных типовых режимах. 3. Дайте определение степени устойчивости. 4. На чем основано определение устойчивости по диаграмме Вышнеградского. 5. В чем заключает особенность интегральных оценок качества. ТЕМА 7. Синтез одноконтурных систем автоматического Регулирования. Задача синтеза. Порядок выбора оптимальных настроек регуляторов методом незатухающих колебаний. Графоаналитический метод синтеза автоматических систем. Расчет настроек типовых регуляторов методом ЛАФХ. Порядок выбора оптимальных настроек типовых регуляторов из условия минимума интегрального квадратичного критерия качества. Методические указания Основным и наиболее важным приложением теории автоматического управления является синтез автоматических систем. Под синтезом понимают выбор структуры и составных элементов системы. При изучении данной темы студент должен ознакомиться параметрическим синтезом оптимальных законов регулирования. В зависимости от критериев качества регулирования различают методы параметрического синтеза. При использовании интегрального квадратичного критерия качества для расчета оптимальных настроек регуляторов используют метод расширенных частотных характеристик. Второй метод основан на сравнении частотных характеристик реальной системы и идеальной (желаемой) – графоаналитический метод. После изучения с методами необходимо освоить методику выбора оптимальных настроек типовых законов регулирования: пропорционального, интегрального, пропорционально-интегрального, интегрально-пропорционального, дифференциального. Вопросы для самопроверки. 1. Дайте определение синтезу оптимальных законов регулирования. 2. Как физически осуществить оптимальные алгоритмы управления. 3. Как используется ЛАФХ в расчете настроек регуляторов. 4. Как меняется переходный процесс в системе с ПИ-регулятором если увеличить интегральную составляющую от нуля до номинального значения. 5. Перечислите особенности расчета ПИД-регулятора. ТЕМА 8. Повышение точности систем автоматического Управления. Повышение качества переходных процессов Повышение порядка астатизма. Теория инвариантности и комбинированное управление. Неединичные обратные связи. Понятия о корректирующих устройствах. Последовательные корректирующие устройства. Параллельные корректирующие устройства. Обратные связи. Методические указания Вначале изучения темы студент должен ознакомиться с понятиями статических и астатических объектов, регуляторов и систем регулирования. Затем следует познакомиться со схемными методами повышения точности систем управления. Наиболее распространенными являются двухконтурные системы регулирования. Необходимо усвоить методику расчета настроек регуляторов двухконтурных систем, теорию инвариантности и комбинированного управления. Комбинированное управление позволяет вводя внешние компенсирующие связи между регуляторами добиться расчленения сложной системы со многими взаимосвязанными параметрами на ряд простейших систем с одним регулируемым параметром. Инвариантное регулирование позволяет достичь независимости регулируемой величины от внешних возмущающих воздействия путем их компенсации. Затем студент должен изучить порядок построения и расчета корректирующих устройств систем, освоить методику расчета и установки в систему последовательного, параллельного корректирующих устройств. Вопросы для самопроверки 1. Дайте определение статического регулирования. 2. Назовите особенности расчета настроек регуляторов двухконтурной системы. 3. Дайте определение инвариантной системы по отношению к возмущающемуся воздействию. 4. Дайте определение инвариантной системы по отношению к задающему воздействию. 5. Чем определяется комбинированное управление системы. 6. Назовите виды корректирующих устройств и их порядок расчета. ЗАДАНИЯ Задача 1. С помощью преобразования Лапласа решить дифференциальное уравнение с заданными начальными условиями таблица 1. Таблица 1. Дифференциальные уравнения.
Задача 2. По известной кривой разгона и весовой функции линейного элемента (таблица 2) найти: 1) реакцию на входной сигнал x(t); 2) весовую функцию или кривую разгона соответственно; 3) передаточную функцию элемента. Таблица 2. Задания к задаче 2.
Задача 3. По известной передаточной функции элемента W(s) найти его кривую разгона, весовую функцию, амплитудно-частотную, фазо-частотную, амлитудно-фазовую характеристики. Построить графики. Записать дифференциальное уравнение элемента, связывающее входную и выходную величины (таблица 3). Таблица 3. Задания к задаче 3.
Задача 4. Вывести передаточную функцию для заданной структурной схемы системы (таблица 4). Таблица 4. Структурные схемы.
Окончание таблицы 4
Задача 5. Исследовать на устойчивость систему автоматического управления, схема которой приведена на рис. 1, учитывая данные, приведенные в таблице 5: 1) с помощью критерия устойчивости Гурвица; 2) с помощью графического критерия устойчивости Михайлова.
у Рис. 1. Структурная схема системы Таблица 5. Задания для задачи 5
Окончание таблицы 5
Задача 6. Исследовать устойчивость системы автоматического регулирования с помощью критерия устойчивости Найквиста. Схема системы приведена на рисунке 2, данные для расчета в таблице 6.

Таблица 6.
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ Задача 1. С помощью преобразования Лапласа решить дифференциальное уравнение с заданными начальными условиями:
При решении уравнения с использованием преобразования Лапласа необходимо его преобразовать по Лапласу с учетом начальных условий:
Из последнего выражения определяется y(s), которое и является решением уравнения, которое записано в терминах преобразования Лапласа. Для получения решения уравнения во временной области полученная дробь раскладывается на простейшие дроби, от которых в последствии по таблицам необходимо взять обратное преобразование Лапласа. В результате разложения получаем следующее выражение:
Приравнивая коэффициенты при одинаковых степенях s в числителе, записываем систему алгебраических уравнений для определения неизвестных коэффициентов:
Решение системы: Таким образом, дробь разложена на следующие простейшие дроби:
Взяв обратное преобразование Лапласа от последнего выражения, получим: Функция y(t) является решением дифференциального уравнения. Задача 2. По известной кривой разгона и весовой функции линейного элемента найти: 1. Реакцию на входной сигнал x(t). 2. Весовую функцию или кривую разгона соответственно. 3. Передаточную функцию элемента. Задано: кривая разгона – h(t) = 2t; весовая функция – ω(t) = 1- te-t; входной сигнал – x(t) = 1- e-t sin t. 1) Реакция элемента на входной сигнал определяется по интегралу Дюамеля, который может быть записан через кривую разгона или через весовую функцию. Если известна кривая разгона, то интеграл Дюамеля записывается следующим образом:
2) Между кривой разгона и весовой функцией существует взаимная связь. Если известна кривая разгона, то весовая функция определяется как: Если же известна весовая функция, то кривая разгона 3) Передаточная функция, которая представляет собой отношение преобразованного по Лапласу выходного сигнала к преобразованному по Лапласу входному сигналу при нулевых начальных условиях, может быть определена как через кривую разгона, так и через весовую функцию:
Для нашей задачи:
Задача 3. По известной передаточной функции элемента W(s) найти его кривую разгона, весовую функцию, частотные характеристики – АФХ, ФЧХ, АЧХ, ВЧХ, построить графики. Записать дифференциальное уравнение элемента, связывающее выходную координату и входную координату. Задана следующая передаточная функция: По определению передаточная функция представляет собой W(s) = y(s)/x(s). Для получения дифференциального уравнения запишем y(s)/ x(s) = (3s + 4)/((2s + 3)(4s +1)). Полученное выражение преобразуем следующим образом: или это есть не что иное, как дифференциальное уравнение, но записанное в терминах преобразования Лапласа. Для получения дифференциального уравнения в привычной временной форме записи необходимо взять обратное преобразование Лапласа с учетом нулевых начальных условий, т.е.
Временные характеристики: кривая разгона и весовая функция связаны с передаточной функцией соотношениями:
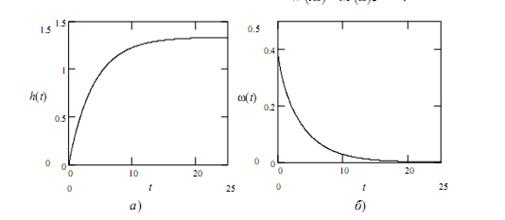
Таким образом, кривая разгона определяется выражением:
а весовая функция выражением: Кроме того, если определена кривая разгона, то весовая функция может быть получена по ней, так как они связаны между собой формулой Графики функций h(t) и ω(t) представлены на рис. 3, а и б соответственно. Для отыскания частотных характеристик в передаточной функции производится замена Амплитудно-фазовая характеристика является комплексной функцией, которую записывают в показательной форме с выделением амплитудно-частотной характеристики (АЧХ) и фазо-частотной характеристики (ФЧХ) или в алгебраической форме с выделением вещественно-частотной характеристики (ВЧХ) и мнимой частотной характеристики (МЧХ). Показательная форма записи АФХ имеет вид:
Рис. 3 Временные характеристики: а – кривая разгона; б – весовая функция Рассматриваемый элемент является линейным и поэтому для него выполняется принцип суперпозиции, в связи с которым его амплитудно-частотная характеристика определяется как отношение АЧХ числителя к АЧХ знаменателя, так выражение для АФХ представляет собой дробь, т.е. Таким образом, выражение для АЧХ запишется в виде: Фазо-частотная характеристика определяется как разность фаз числителя и знаменателя – Таким образом, получаем следующее выражение для ФЧХ:
Амплитудно-фазовая характеристика в показательной форме записывается в виде: Графики функции
а) б) Рис. 4 Частотные характеристики: а – АЧХ; б – ФЧХ Годограф АФХ W(iω) представлен на рис. 5. Запишем теперь выражение для АФХ в алгебраической форме, для этого надо освободиться от мнимости в знаменателе. С этой целью умножим и знаменатель, и числитель на сопряженные выражения относительно комплексных составляющих знаменателя. Проведем следующие математические преобразования:
Из последнего выражения записываем: ВЧХ
Рис. 5 Годограф АФХ График функции
Рис. 6 Вещественно-частотная характеристика Задача 4. Преобразовать структурную схему (рис. 7) и записать передаточную функцию. Считается, что известны передаточные функции отдельных элементов и входной сигнал.
Рис. 7 Структурная схема Для записи передаточной функции сложной структурной схемы ее необходимо преобразовать в соответствии с правилами преобразования структурных схем. Для того чтобы развязать перекрестные связи в заданной структурной схеме, перенесем узел 1 через звено с передаточной функцией W3(s) и через узел 2 в соответствии с правилами преобразования структурных схем. В результате проведенных преобразований получаем структурную схему (рис. 8), в которой четко прослеживаются основные типы соединений: последовательное соединение и вложенные друг в друга соединения с обратной связью.
Рис. 8 Преобразованная структурная схема Записывая последовательно передаточные функции отдельных элементов схемы, придем к выражению передаточной функции всей схемы:
Задача 5. Исследовать устойчивость системы автоматического регулирования (рис. 9): 1) с помощью критерия Рауса–Гурвица; 2) с помощью критерия Михайлова.
Рис. 9 Структурная схема системы автоматического регулирования Заданы следующие исходные данные: передаточные функции объекта и регулятора: 1) Для исследования устойчивости систем автоматического регулирования с помощью критерия Рауса–Гурвица необходимо знать дифференциальное или характеристическое уравнение системы. Знаменатель передаточной функции всегда представляет собой характеристический полином, поэтому необходимо, прежде всего, записать передаточную функцию замкнутой одноконтурной системы (рис. 9): Характеристическое уравнение определяется путем приравнивания к нулю знаменателя передаточной функции замкнутой системы:
с учетом конкретных значений передаточных функций объекта и регулятора получим: откуда характеристическое уравнение запишется в виде:
Задачу будем решать с использованием формулировки критерия устойчивости по Гурвицу. Для этого необходимо из коэффициентов характеристического уравнения составить главный определитель Гурвица по определенному правилу: вдоль главной диагонали записываются коэффициенты, начиная с аn – 1, выше главной диагонали записываются коэффициенты с индексом на единицу меньше, ниже главной диагонали записываются коэффициенты с индексом на единицу больше. Порядок определителя соответствует порядку характеристического уравнения. Из этого определителя составляются диагональные миноры, которых должно быть n – 1. Система автоматического управления будет устойчивой тогда и только тогда, когда все диагональные миноры главного определителя будут положительны. Для нашей задачи главный определитель Гурвица имеет вид:
Вычислим последовательно диагональные миноры:
Все диагональные миноры отрицательны, следовательно, система неустойчива. Следует отметить, что для исследования устойчивости не обязательно вычислять все миноры. Если при вычислении миноров получают, что его значение отрицательно, дальнейшие расчеты можно прекратить и сделать вывод, что система неустойчива. 2) Исследуем эту же систему автоматического управления на устойчивость с использованием частотного критерия устойчивости Михайлова. В соответствии с этим критерием необходимо построить годограф Михайлова, который для устойчивых систем имеет строго определенный вид. И тогда система автоматического управления будет устойчивой, если годограф Михайлова начинается на положительной вещественной полуоси, обходит последовательно, нигде не обращаясь в нуль, n квадрантов координатной плоскости, уходя в бесконечность в n квадранте, где n – порядок характеристического уравнения. Для записи математического выражения годографа Михайлова необходимо в характеристическом уравнении перейти в частотную область, т.е. в уравнении Первая называется вещественной функцией Михайлова, а вторая – мнимой функций Михайлова. По вещественной и мнимой функциям Михайлова строится годограф Михайлова в координатах
Рис. 10 Годограф Михайлова На практике для исследования устойчивости систем автоматического управления удобно пользоваться не критерием Михайлова, а следствием из этого критерия. Для этого необходимо записать уравнения, которые получаются приравниванием к нулю вещественной мнимой функций Михайлова, найти их корни. Следствие гласит, для того чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы корни уравнений Для ответа на вопрос об устойчивости системы необходимо решить следующие уравнения:
В результате решения этих уравнений получаем, что корни уравнения
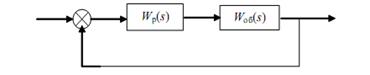
Как видно из расчетов, корни не чередуются и даже являются комплексно-сопряженными, что свидетельствует о том, что система неустойчива. Задача 6. Исследовать на устойчивость систему автоматического регулирования (рис. 11) с помощью критерия Найквиста. Исходными данными являются передаточные функции объекта и регулятора:
Рис. 11 Структурная схема АСР с запаздыванием Критерий устойчивости Найквиста, в отличие от предыдущих критериев, применяется для исследования устойчивости систем автоматического управления с запаздыванием, поэтому в данной задаче рассматривается объект с запаздыванием. Критерий Найквиста дает ответ об устойчивости замкнутой системы по АФХ разомкнутой системы. Он имеет три формулировки в зависимости от того устойчива, нейтральна или неустойчива разомкнутая система. Поэтому, прежде всего, необходимо ответить на вопрос об устойчивости разомкнутой системы. Исследуем на устойчивость разомкнутую систему известными методами. Для записи передаточной функции разомкнутой системы разорвем обратную связь в замкнутой системе. Разомкнутая система представляет собой последовательно соединенные между собой объект и регулятор, ее передаточная функция запишется в виде: Характеристическое уравнение разомкнутой системы – это знаменатель передаточной функции, приравненный к нулю, будет Корни характеристического уравнения Для ответа на вопрос об устойчивости замкнутой системы по критерию Найквиста проще всего построить АФХ разомкнутой системы и посмотреть охватывает она точку (–1, i0) или нет, поэтому запишем выражение для АФХ разомкнутой системы:
откуда АЧХ: ФЧХ: Задаваясь значениями частот построим годограф АФХ разомкнутой системы (рис. 12). Как видно из рисунка АФХ разомкнутой системы охватывает точку (–1, i0), что говорит о том, что замкнутая система неустойчива.
Рис. 12 Годограф АФХ разомкнутой системы Список рекомендуемой литературы 1. Лазарева Т.Я., Мартемьянов Ю.Ф. Основы теории автоматического управления: Учеб. пособие. Тамбов: Изд-во Тамб. гос. техн. ун-та, 2004. 352 с. 2. Лазарева Т.Я. Нелинейные системы автоматического управления: Учеб. пособие. Тамбов: Изд-во Тамб. гос. техн. ун-та, 2006. 84 с. 3. Топчеев Ю.И., Цыпляков А.П. Задачник по теории автоматического регулирования: Учеб. пособие. М.: Машиностроение, 2006. 4. Теория автоматического управления / Под ред. А.А. Воронова. М.: Высшая школа, 2006. 367 с.
Содержание
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Методические указания к контрольной работе №1 по дисциплине «Теория автоматического управления» для студентов специальности 220201 заочной формы обучения Составила Скоробогатова Татьяна Николаевна Рецензент С.П. Косырев Редактор Л.В.Максимова   Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|


























































 х у
х у


































 .
. .
.


 следовательно,
следовательно, Если известна весовая функция, то интеграл Дюамеля имеет вид:
Если известна весовая функция, то интеграл Дюамеля имеет вид: и тогда выходной сигнал в данной задаче будет записан как:
и тогда выходной сигнал в данной задаче будет записан как: 
 т.е.
т.е. 
 следовательно, в нашем случае
следовательно, в нашем случае 



 .
.







 , т.е.
, т.е.  .
. .
.
 Числитель и знаменатель АФХ записаны в алгебраической форме, в этом случае модуль определяется как
Числитель и знаменатель АФХ записаны в алгебраической форме, в этом случае модуль определяется как 

 которые, в свою очередь, определяются как
которые, в свою очередь, определяются как  если известна алгебраическая запись комплексной функции.
если известна алгебраическая запись комплексной функции.
 .
. и
и  представлены на рис. 4, а и б. Анализ характера АЧХ и ФЧХ показывает, что
представлены на рис. 4, а и б. Анализ характера АЧХ и ФЧХ показывает, что 


 МЧХ
МЧХ 

 представлен на рис. 6.
представлен на рис. 6.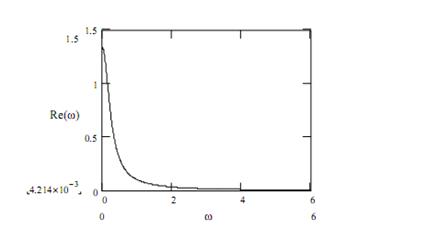


 .
.









 сделать замену – s = iω. В результате получим комплексное выражение
сделать замену – s = iω. В результате получим комплексное выражение  в котором выделим вещественную часть –
в котором выделим вещественную часть –  и мнимую часть –
и мнимую часть – 
 методом контрольных точек. Для этого задается значение частоты, для которой определяются значения функций
методом контрольных точек. Для этого задается значение частоты, для которой определяются значения функций  График годографа Михайлова представлен на рис. 10, его анализ показывает, что годограф начинается на вещественной положительной полуоси и располагается только в первом квадранте, что свидетельствует о том, что система неустойчива.
График годографа Михайлова представлен на рис. 10, его анализ показывает, что годограф начинается на вещественной положительной полуоси и располагается только в первом квадранте, что свидетельствует о том, что система неустойчива.
 были действительными чередующимися между собой и выполнялись условия
были действительными чередующимися между собой и выполнялись условия 
 ;
; 
 -
-  а уравнения
а уравнения  -
-


 .
. .
. . В соответствии с необходимым и достаточным условием устойчивости разомкнутая система будет нейтральной. Критерий Найквиста в этом случае звучит: если разомкнутая система нейтральна, то для того чтобы замкнутая система была устойчивой, необходимо и достаточно, чтобы АФХ разомкнутой системы с добавлением в бесконечность не охватывала точку (–1, i0).
. В соответствии с необходимым и достаточным условием устойчивости разомкнутая система будет нейтральной. Критерий Найквиста в этом случае звучит: если разомкнутая система нейтральна, то для того чтобы замкнутая система была устойчивой, необходимо и достаточно, чтобы АФХ разомкнутой системы с добавлением в бесконечность не охватывала точку (–1, i0). ;
; ,
, .
.