
|
|
ТЕМА 2. Математическое описание систем автоматического управления.Стр 1 из 3Следующая ⇒ ВВЕДЕНИЕ Теория автоматического управления является основополагающей дисциплиной цикла «Общепрофессиональных дисциплин» подготовки инженеров по специальности 220201 «Управление и информатика в технических системах». Целью дисциплины является изучение принципов построения, законов управления, методик исследования систем автоматического управления, основных методов синтеза этих систем на базе математических методов и современных технических средств. Курс теории автоматического управления является базой для развития у студентов навыков проектирования, синтеза коррекции и расчета систем. В связи с этим основное внимание при изучении дисциплины уделяется общим методам изучения процессов, протекающих в системах управления. Расчет и анализ этих процессов требует у студентов знания математических приемов. В начале курса даются общие понятия об управлении, системах управления, характеристиках основных звеньев систем, затем изучаются математические модели линейных, нелинейных и дискретных систем, вопросы устойчивости и качества систем, методы коррекции систем. В заключении курса рассматриваются методы расчета систем автоматического управления по заданным техническим характеристикам. ТЕМА 1. Основные понятия о системах автоматического управления. Исторические факты, основные этапы развития теории управления, современное состояние и развитие теории автоматического управления. Классификация систем автоматического управления. Законы управления. Регулирование по отклонению. Отрицательная обратная связь. Регулирование по возмущающемуся воздействию. Основные элементы функциональной схемы системы автоматического управления. Алгоритмы управления и их характеристики. Методические указания. Студент должен ознакомиться с историческими факторами и основными этапами развития теории управления, с современным состоянием и дальнейшим развитием теории автоматического управления; изучить классификацию систем автоматического управления; познакомиться с простейшими системами автоматического управления, примеры которых приведены в указанной литературе. Необходимо изучить законы управления, принципы регулирования по возмущению и по отклонению, их достоинства и недостатки, области применения. Кроме того, студент должен познакомиться с основными элементами функциональной схемы системы автоматического управления: датчик, задающее устройство, элемент сравнения, исполнительный механизм, измерительное устройство, регулирующий орган. В заключение темы студент должен ознакомиться с понятиями линейных и нелинейных алгоритмов управления, методом определения линейности системы, а также с основными регулярными сигналами (прямоугольный импульс, единичная функция, импульсная функция), используемыми для исследовании систем автоматического управления. Вопросы для самопроверки. 1. Перечислите этапы развития, современное состояние и перспективы дальнейшего развития теории автоматического управления. 2. Приведите примеры систем автоматического управления. 3. Каково преимущество регулирования по отклонению перед регулированием по возмущению. 4. Дайте определение линейной системы. 5. Дайте определение основным элементам систем. 6. Составьте функциональную схему простейшей системы управления. 7. Охарактеризуйте основные регулярные сигналы, используемые для исследования характеристик систем управления. ТЕМА 2. Математическое описание систем автоматического управления. Основные способы математического описания систем автоматического управления. Уравнения движения системы. Линеаризация дифференциальных уравнений. Примеры уравнений объектов управления. Свободное, установившееся и переходное движение системы управления. Статические и динамические характеристики, временные динамические характеристики систем. Преобразование Лапласа, свойства преобразований Лапласа. Определение передаточной функции элементов систем управления, связь передаточной функции с дифференциальным уравнением. Кривая разгона и весовая функция линейных систем автоматического управления. Методические указания. Студент должен познакомиться с основными способами математического описания систем управления. Он должен усвоить, что уравнения движения системы автоматического управления являются дифференциальными уравнениями с постоянными коэффициентами, которые могут являться нелинейными. Нелинейные дифференциальные уравнения необходимо линеаризовывать, то есть заменит исходные нелинейные уравнения линейными, приближенно описывающими процессы происходящие в системе. Одним из самых распространенных методов линеаризации является разложение нелинейной функции, входящей в уравнение в ряд Тейлора. Решение дифференциального уравнения складывается из общего решения однородного уравнения и частного решения неоднородного уравнения. Общее решение однородного уравнения определяется, как свободное движение системы управления; частное решение неоднородного уравнения как вынужденное движение системы управления; общее решение неоднородного уравнения как переходное движение системы управления. Студенту необходимо познакомиться с основными статическими и динамическими характеристиками системы автоматического управления. Под статической характеристикой системы понимают зависимость выходной величины от входной в установившемся режиме. Среди динамических характеристик системы управления различают: временные характеристики («кривая разгона», весовая функция); частотные характеристики, в зависимости от действующего регулярного сигнала; дифференциальное уравнение, передаточная функция. Дифференциальное уравнение и передаточная функция являются теоретическими характеристиками, поэтому необходимо освоить основной математический аппарат теории автоматического управления, используемый для описания динамических характеристик. Таким аппаратом является преобразование Лапласа. Студенту необходимо знать преобразование Лапласа от элементарных функций, его свойства, уметь находить оригинал по изображению, решать линейные дифференциальные уравнения операционным методом, также необходимо познакомиться с динамической характеристикой объекта, наиболее широко используемой в теории автоматического управления – передаточной функцией. Передаточная функция представляет собой отношение выходного сигнала объекта к его входному сигналу преобразованное по Лапласу. Также необходимо изучить переход от передаточной функции объекта у другим его характеристикам. Вопросы для самопроверки. 1. Что такое уравнение движения системы. 2. Для чего проводится линеаризация нелинейных дифференциальных уравнений. 3. Какая характеристика называется статической. 4. Какие динамические характеристики объекта и системы известны. 5. Что такое интеграл свертки. 6. Дайте определение преобразованию Лапласа от некоторой функции. 7. Для каких функций существует преобразование Лапласа. 8. Какая характеристика объекта или системы называется передаточной функцией. 9. Как найти «кривую разгона» или весовую функция объекта управления по его передаточной функции. Методические указания. Студенту необходимо обратить внимание на определение амплитудно-фазовой характеристики (АФХ). АФХ строится на комплексной плоскости. Необходимо познакомиться с построением АФХ в полярных координатах, освоить переход от полярных координат к мнимой и действительной части АФХ. Затем познакомиться с составляющими АФХ амплитудно-частотной характеристикой и фазо-частотной, вещественно-частотной и мнимой частотной характеристиками. Необходимо изучить физический смысл всех частотных характеристик и связь между ними, уметь переходить от одной характеристики к другой. Необходимо познакомиться с понятиями максимально фазовой системы и минимально-фазовой системы. Вопросы для самопроверки. 1. Какая характеристика называется амплитудно-фазовой. 2. Каковы формы записи амплитудно-фазовой характеристики. 3. Почему годограф амплитудно-фазовой характеристики для большинства элементов системы автоматического управления начинается под прямым углом к действительной оси. 4. Как по передаточной функции элемента системы найти частотные характеристики. 5. Дайте определение минимально фазовой системе. Приведите примеры таких систем. Автоматического управления. Звено направленного действия системы управления. Типовые динамические звенья системы управления: интегрирующее звено, идеальное и реальное дифференцирующие звенья, звено чистого запаздывания, апериодическое звено первого порядка, апериодическое звено второго порядка, колебательное звено. Основные способы соединения звеньев: последовательное, параллельное и соединение звеньев с обратной связью. Правила преобразования структурных схем систем управления. Передаточные функции систем автоматического регулирования с различным соединением звеньев направленного действия. Типовые законы регулирования: пропорциональный (П), интегральный (И), пропорционально-дифференциальный (ПД), пропорционально-интегральный (ПИ), пропорционально-интегрально-дифференциальный (ПИД). Методические указания. Студенту необходимо начать изучение темы с изучения типовых динамических звеньев систем управления. Рассмотреть динамические характеристики каждого звена: передаточную функцию, дифференциальное уравнение, «кривую разгона», весовую функцию, амплитудно-частотную, фазо-частотную, амплитудно-фазовую характеристики. Изучить качественный вид всех характеристик и уметь выводить их по передаточной функции. Для проведения упрощения в дальнейшем сложных схем систем автоматического управления требуется познакомиться со структурным анализом. В нем прежде всего необходимо изучить способы соединения звеньев систем: последовательное, параллельное, соединение с обратной связью; для каждого соединения рассмотреть алгебру передаточных функций, получение общей передаточной функции различных видов соединений, если известны передаточные функции каждого звена. Например, передаточная функция параллельного соединения звеньев равна сумме передаточных функций отдельных звеньев; передаточная функция последовательного соединения звеньев равна произведению передаточных функций отдельных звеньев. Далее необходимо познакомиться с правилами таких преобразований структурных схем как перенос узла через узел; перенос узла через звено по направлению распространения сигнала и наоборот перенос узла через звено против направления распространения сигнала; перенос сумматора через сумматор и т.д. В заключение этого раздела необходимо изучить получение передаточной функции одноконтурной системы автоматического регулирования по различным каналам. В простейшей одноконтурной системе регулирования используется отрицательная обратная связь и регулятор. Поэтому необходимо знание типовых законов регулирования таких как пропорциональный (П), интегральный (И), пропорционально-дифференциальный (ПД), пропорционально-интегральный (ПИ), пропорционально-интегрально- дифференциальный (ПИД) и выпускаемых на их основе регуляторов. Необходимо изучить особенности регуляторов, их достоинства и недостатки, области применения каждого из типовых регуляторов. Вопросы для самопроверки. 1. Охарактеризуйте каждое из типовых звеньев автоматики. 2. Выведите для каждого звена его динамические характеристики. 3. Перечислите основные способы соединения звеньев в системах автоматики. 4. Запишите общую передаточную функцию для всех типов соединения звеньев. 5. Проведите структурные преобразования заданной схемы системы автоматического управления. 6. Охарактеризуйте каждый тип из промышленных регуляторов. 7. Назовите области применения каждого типа из промышленных регуляторов. Методические указания. Изучение данной темы студент должен начать с определения устойчивости и запомнить, что устойчивость линейных систем автоматического управления, которые описываются дифференциальными уравнениями с постоянными коэффициентами определяется расположением корней характеристического уравнения. Этот признак устойчивости дает необходимое и достаточное условие устойчивости систем и является базовым для всех критериев устойчивости. Он заключается в отрицательной действительной части корней характеристического уравнения. На практике применение этого признака ограничено, поэтому разработан ряд критериев и такой как положительность всех коэффициентов характеристического уравнения. Все критерии устойчивости подразделяются на аналитические (алгебраические) и частотные (графические). К первым относятся критерии Гурвица и Рауса. Исходя из коэффициентов характеристического уравнения составляется главный определитель Гурвица, из него составляются диагональные миноры, которые для устойчивой системы должны быть положительны. Для устойчивости по Раусу составляется таблица из коэффициентов характеристического уравнения, первый столбец которой должен быть положителен. Ко второй группе относятся частотные критерии Михайлова и Найквиста. Наибольшее распространение получить частотный критерий Найквиста, который позволяет по амплитудно-фазовой характеристике разомкнутой системы судить об устойчивости замкнутой. Этот критерий позволяет судить об устойчивости в том случае, когда характеристики отдельных элементов и системы заданы экспериментально, а также для систем с запаздыванием. Метод Д-разбиений позволяет разбить комплексную плоскость коэффициентов характеристического уравнения на области устойчивой работы системы управления. Вопросы для самопроверки. 1. Каким образом должны быть расположены корни характеристического уравнения устойчивой, не устойчивой и системы находящейся на границе устойчивости. 2. Как звучит необходимое условие устойчивости системы. 3. Сформулируйте критерии устойчивости по Гурвицу, Раусу. Определите устойчивость заданной системы. 4. Сформулируйте критерий устойчивости по Михайлову. 5. Сформулируйте критерий устойчивости по Найквисту. 6. Сформулируйте критерий устойчивости с использованием Д-разбиений. Как определяется область устойчивости системы. Методические указания. Студент должен познакомиться с критериями качества переходных процессов, которые делятся на группы: критерии точности; критерии, определяющие запас устойчивости; быстродействие систем; интегральные оценки. Прямые показатели качества позволяют оценить качество регулирования непосредственно по кривой переходного процесса: статическая ошибка, динамическая ошибка, степень затухания, перерегулирование. Косвенные показатели позволяют определить степень устойчивости, степень колебательности системы. Для оценки точности системы управления используется величина ошибок в типовых режимах: неподвижное состояние, движение с постоянной скоростью, движение по гармоническому (синусоидальному) закону. Для определения степени устойчивости системы студент должен изучить корневые методы и диаграмму Вышнеградского, которые позволяют иметь более полное суждение о быстродействии и запасе устойчивости системы управления. Интегральные критерии качества позволяют дать оценку быстроты затухания и величины отклонения управляемой величины в совокупности, без определения того и другого в отдельности. Вопросы для самопроверки 1. Определите связь степени затухания и степени колебательности. 2. Сформулируйте понятие величины ошибок в различных типовых режимах. 3. Дайте определение степени устойчивости. 4. На чем основано определение устойчивости по диаграмме Вышнеградского. 5. В чем заключает особенность интегральных оценок качества. Регулирования. Задача синтеза. Порядок выбора оптимальных настроек регуляторов методом незатухающих колебаний. Графоаналитический метод синтеза автоматических систем. Расчет настроек типовых регуляторов методом ЛАФХ. Порядок выбора оптимальных настроек типовых регуляторов из условия минимума интегрального квадратичного критерия качества. Методические указания Основным и наиболее важным приложением теории автоматического управления является синтез автоматических систем. Под синтезом понимают выбор структуры и составных элементов системы. При изучении данной темы студент должен ознакомиться параметрическим синтезом оптимальных законов регулирования. В зависимости от критериев качества регулирования различают методы параметрического синтеза. При использовании интегрального квадратичного критерия качества для расчета оптимальных настроек регуляторов используют метод расширенных частотных характеристик. Второй метод основан на сравнении частотных характеристик реальной системы и идеальной (желаемой) – графоаналитический метод. После изучения с методами необходимо освоить методику выбора оптимальных настроек типовых законов регулирования: пропорционального, интегрального, пропорционально-интегрального, интегрально-пропорционального, дифференциального. Вопросы для самопроверки. 1. Дайте определение синтезу оптимальных законов регулирования. 2. Как физически осуществить оптимальные алгоритмы управления. 3. Как используется ЛАФХ в расчете настроек регуляторов. 4. Как меняется переходный процесс в системе с ПИ-регулятором если увеличить интегральную составляющую от нуля до номинального значения. 5. Перечислите особенности расчета ПИД-регулятора. Методические указания Вначале изучения темы студент должен ознакомиться с понятиями статических и астатических объектов, регуляторов и систем регулирования. Затем следует познакомиться со схемными методами повышения точности систем управления. Наиболее распространенными являются двухконтурные системы регулирования. Необходимо усвоить методику расчета настроек регуляторов двухконтурных систем, теорию инвариантности и комбинированного управления. Комбинированное управление позволяет вводя внешние компенсирующие связи между регуляторами добиться расчленения сложной системы со многими взаимосвязанными параметрами на ряд простейших систем с одним регулируемым параметром. Инвариантное регулирование позволяет достичь независимости регулируемой величины от внешних возмущающих воздействия путем их компенсации. Затем студент должен изучить порядок построения и расчета корректирующих устройств систем, освоить методику расчета и установки в систему последовательного, параллельного корректирующих устройств. Вопросы для самопроверки 1. Дайте определение статического регулирования. 2. Назовите особенности расчета настроек регуляторов двухконтурной системы. 3. Дайте определение инвариантной системы по отношению к возмущающемуся воздействию. 4. Дайте определение инвариантной системы по отношению к задающему воздействию. 5. Чем определяется комбинированное управление системы. 6. Назовите виды корректирующих устройств и их порядок расчета. ЗАДАНИЯ Задача 1. С помощью преобразования Лапласа решить дифференциальное уравнение с заданными начальными условиями таблица 1. Таблица 1. Дифференциальные уравнения.
Задача 2. По известной кривой разгона и весовой функции линейного элемента (таблица 2) найти: 1) реакцию на входной сигнал x(t); 2) весовую функцию или кривую разгона соответственно; 3) передаточную функцию элемента. Таблица 2. Задания к задаче 2.
Задача 3. По известной передаточной функции элемента W(s) найти его кривую разгона, весовую функцию, амплитудно-частотную, фазо-частотную, амлитудно-фазовую характеристики. Построить графики. Записать дифференциальное уравнение элемента, связывающее входную и выходную величины (таблица 3). Таблица 3. Задания к задаче 3.
Задача 4. Вывести передаточную функцию для заданной структурной схемы системы (таблица 4). Таблица 4. Структурные схемы.
Окончание таблицы 4
Задача 5. Исследовать на устойчивость систему автоматического управления, схема которой приведена на рис. 1, учитывая данные, приведенные в таблице 5: 1) с помощью критерия устойчивости Гурвица; 2) с помощью графического критерия устойчивости Михайлова.
у Рис. 1. Структурная схема системы Таблица 5. Задания для задачи 5
Окончание таблицы 5
Задача 6. Исследовать устойчивость системы автоматического регулирования с помощью критерия устойчивости Найквиста. Схема системы приведена на рисунке 2, данные для расчета в таблице 6.

Таблица 6.
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ Задача 1. С помощью преобразования Лапласа решить дифференциальное уравнение с заданными начальными условиями:
При решении уравнения с использованием преобразования Лапласа необходимо его преобразовать по Лапласу с учетом начальных условий:
Из последнего выражения определяется y(s), которое и является решением уравнения, которое записано в терминах преобразования Лапласа. Для получения решения уравнения во временной области полученная дробь раскладывается на простейшие дроби, от которых в последствии по таблицам необходимо взять обратное преобразование Лапласа. В результате разложения получаем следующее выражение:
Приравнивая коэффициенты при одинаковых степенях s в числителе, записываем систему алгебраических уравнений для определения неизвестных коэффициентов:
Решение системы: Таким образом, дробь разложена на следующие простейшие дроби:
Взяв обратное преобразование Лапласа от последнего выражения, получим: Функция y(t) является решением дифференциального уравнения. Задача 2. По известной кривой разгона и весовой функции линейного элемента найти: 1. Реакцию на входной сигнал x(t). 2. Весовую функцию или кривую разгона соответственно. 3. Передаточную функцию элемента. Задано: кривая разгона – h(t) = 2t; весовая функция – ω(t) = 1- te-t; входной сигнал – x(t) = 1- e-t sin t. 1) Реакция элемента на входной сигнал определяется по интегралу Дюамеля, который может быть записан через кривую разгона или через весовую функцию. Если известна кривая разгона, то интеграл Дюамеля записывается следующим образом:
2) Между кривой разгона и весовой функцией существует взаимная связь. Если известна кривая разгона, то весовая функция определяется как: Если же известна весовая функция, то кривая разгона 3) Передаточная функция, которая представляет собой отношение преобразованного по Лапласу выходного сигнала к преобразованному по Лапласу входному сигналу при нулевых начальных условиях, может быть определена как через кривую разгона, так и через весовую функцию:
Для нашей задачи:
Задача 3. По известной передаточной функции элемента W(s) найти его кривую разгона, весовую функцию, частотные характеристики – АФХ, ФЧХ, АЧХ, ВЧХ, построить графики. Записать дифференциальное уравнение элемента, связывающее выходную координату и входную координату. Задана следующая передаточная функция: По определению передаточная функция представляет собой W(s) = y(s)/x(s). Для получения дифференциального уравнения запишем y(s)/ x(s) = (3s + 4)/((2s + 3)(4s +1)). Полученное выражение преобразуем следующим образом: или это есть не что иное, как дифференциальное уравнение, но записанное в терминах преобразования Лапласа. Для получения дифференциального уравнения в привычной временной форме записи необходимо взять обратное преобразование Лапласа с учетом нулевых начальных условий, т.е.
Временные характеристики: кривая разгона и весовая функция связаны с передаточной функцией соотношениями:
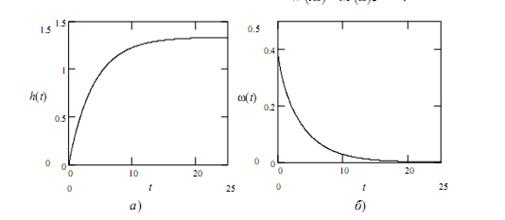
Таким образом, кривая разгона определяется выражением:
а весовая функция выражением: Кроме того, если определена кривая разгона, то весовая функция может быть получена по ней, так как они связаны между собой формулой Графики функций h(t) и ω(t) представлены на рис. 3, а и б соответственно. Для отыскания частотных характеристик в передаточной функции производится замена Амплитудно-фазовая характеристика является комплексной функцией, которую записывают в показательной форме с выделением амплитудно-частотной характеристики (АЧХ) и фазо-частотной характеристики (ФЧХ) или в алгебраической форме с выделением вещественно-частотной характеристики (ВЧХ) и мнимой частотной характеристики (МЧХ). Показательная форма записи АФХ имеет вид:
Рис. 3 Временные характеристики: а – кривая разгона; б – весовая функция Рассматриваемый элемент является линейным и поэтому для него выполняется принцип суперпозиции, в связи с которым его амплитудно-частотная характеристика определяется как отношение АЧХ числителя к АЧХ знаменателя, так выражение для АФХ представляет собой дробь, т.е. Таким образом, выражение для АЧХ запишется в виде: Фазо-частотная характеристика определяется как разность фаз числителя и знаменателя – Таким образом, получаем следующее выражение для ФЧХ:
Амплитудно-фазовая характеристика в показательной форме записывается в виде: Графики функции
а) б) Рис. 4 Частотные характеристики: а – АЧХ; б – ФЧХ Годограф АФХ W(iω) представлен на рис. 5. Запишем теперь выражение для АФХ в алгебраической форме, для этого надо освободиться от мнимости в знаменателе. С этой целью умножим и знаменатель, и числитель на сопряженные выражения относительно комплексных составляющих знаменателя. Проведем следующие математические преобразования:
Из после   Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|


























































 х у
х у


































 .
. .
.


 следовательно,
следовательно, Если известна весовая функция, то интеграл Дюамеля имеет вид:
Если известна весовая функция, то интеграл Дюамеля имеет вид: и тогда выходной сигнал в данной задаче будет записан как:
и тогда выходной сигнал в данной задаче будет записан как: 
 т.е.
т.е. 
 следовательно, в нашем случае
следовательно, в нашем случае 



 .
.







 , т.е.
, т.е.  .
. .
.
 Числитель и знаменатель АФХ записаны в алгебраической форме, в этом случае модуль определяется как
Числитель и знаменатель АФХ записаны в алгебраической форме, в этом случае модуль определяется как 

 которые, в свою очередь, определяются как
которые, в свою очередь, определяются как  если известна алгебраическая запись комплексной функции.
если известна алгебраическая запись комплексной функции.
 .
. и
и  представлены на рис. 4, а и б. Анализ характера АЧХ и ФЧХ показывает, что
представлены на рис. 4, а и б. Анализ характера АЧХ и ФЧХ показывает, что 

