
|
|
Механические датчики с электроконтактамиМеханические измерительные устройства с электроконтактами могут быть построены по принципу непосредственного измерения регулируемой величины электрическим методом или определения ее механическим чувствительным элементом, воздействующим на электрические контакты. В устройствах первого типа используется принцип электрической проводимости сельскохозяйственных материалов. На рис. 1.35, а показано механическое измерительное устройство с электроконтактами, используемое в электрогидравлическом регуляторе высоты среза зерноуборочного комбайна. Оно состоит из чувствительных элементов 1, вала 2, шарнирно закрепленного под режущим аппаратом жатки 3, и контактной группы. На конце вала установлен кулачок 4, воздействующий на конечный выключатель 5,который замыкает цепи электромагнитов управляющего золотника. При встрече с препятствием копиры приподнимаются и поворачивают вал с кулачком, который нажимает на кнопку конечного выключателя 5, последовательно размыкающего цепь электромагнита опускания и замыкающего цепь электромагнита подъема. На рис. 1.35, б показан механический чувствительный элемент (щуп) 1 с электроконтактами 2, используемый в системе автоматического направления движения пропашного тракторного агрегата по борозде. Щуп 1, отклоняясь под воздействием стенок борозды, замыкает контакты 2, которые включены в цепь электромагнитов электрогидрозолотникового распределителя, управляющего гидроусилителем руля. Аналогичное устройство (рис. 1.35, в) используется в системе автоматического направления движения культиватора. При отклонениях рабочих органов культиватора в защитную зону рядков растений щуп 1,выполненный в виде поводка, поворачивается и замыкает один из контактов 2 реле 3 или 4 электрогидравлического золотника. На рис. 1.35, г показан измеритель крена с чувствительным элементом в виде несвободного (двухстепенного) гироскопа. Он состоит из ротора 1, подвижной рамки 2, демпфера 3, упругой пластины 4, контактов 5, корпуса 6 и ограничительной пружины 7. Когда машина начинает наклоняться, корпус 6 гироскопа поворачивается вокруг оси подвижной рамки и пластина 4 замыкает посредством одного из контактов 5 цепь соответствующего реле электрогидравлического распределителя.
Рис. 1.35. Механические датчики с электроконтактами На рис. 1.35, д показано электроконтактное измерительное устройство регулятора загрузки молотилки комбайна, выполненное на базе пружинного динамометра 1. Датчик встраивается между ведомым шкивом 2 и приводимым от него в движение молотильным барабаном. Это устройство существенно изменяет свойства объекта, так как жесткая связь между барабаном и шкивом заменяется упругой. Механический чувствительный элемент с электроконтактами (рис. 1.35, е) используется в электромеханическом регуляторе толщины слоя растительной массы, поступающей в молотилку зерноуборочного комбайна. Смещение Dj подвижного контакта относительно неподвижных пропорционально изменению толщины слоя D Н и смещению контактной панели D у 2: Dj = k 2 D y 2 – k 1 D Н. Механический чувствительный элемент 1 с электроконтактами (рис. 1.35, ж), включенными в мостовую схему 2, используется в релейной системе загрузки молотилки зерноуборочного комбайна. Сигнал от чувствительного элемента 1 преобразуется мостовой схемой 2 в электрический сигнал, управляющий поляризованным реле 3 и электрогидрораспределителем. Потенциометрические датчики Потенциометрические устройства широко используются для преобразования линейного х или углового j перемещений (входная величина) в электрический сигнал постоянного или переменного тока (выходная величина). Преобразование перемещений в напряжение (или ток) осуществляется в соответствии с требуемыми функциональными зависимостями U = f (x), U = f (j).
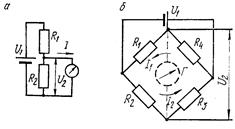
Рис. 1.36. Потенциометрические датчики Конструктивно потенциометрическое измерительное устройство (рис. 1.36, а) состоит из каркаса 1 (прямого или кругового), обмотки 2 (из константа, манганина, изабелина, никелина) и движка 3. В последнее время находят применение непроволочные (пленочные) потенциометры, в которых функцию обмотки выполняет пленка из благородного металла радия, нанесенная на стекло. Если движок потенциометра связать с каким-либо первичным чувствительным элементом (мембрана, поршень и т. п.), то входной величиной может быть ускорение, усилие, давление и т. п. Для устройств согласно схемам на рис. 1.36, а, б напряжение на выходе определяется из выражений:
Для схемы на рис. 1.36, в зависимость U 2 = f (x) имеет нелинейный характер и только при значениях R м®¥ приобретает линейный характер. Уменьшение нелинейности статической характеристики может быть достигнуто включением датчиков в мостовые схемы. Для схемы на рис. 1.36, г:
Применение потенциометрических измерительных устройств в системах сельскохозяйственной автоматики иллюстрирует рис. 1.37.
Рис. 1.37. Примеры применения потенциометрических датчиков В автоматической системе управления тракторным агрегатом (рис. 1.37, а) копирующий щуп 7 нажимным контактом 6 соединяется с одним из контактов 4 или 5, замыкающих цепь управляющих соленоидов 8 и 9. Одновременно замыкается потенциометр 1 и через соответствующее сопротивление блока 3 подается сигнал в цепь импульсного элемента 2. После зарядки конденсатора срабатывает реле и его контакт KV размыкает цепь соленоида. Тем самым регулируется длительность и амплитуда управляющего сигнала. Механический контактный щуп 1 (рис. 1.37, б) в системе автовождения комбайна, выполненный в виде флюгер-копира, закрепляется на левом полевом делителе и прижимается к бровке пружиной 2. Отклонение копира 1 с помощью потенциометра 3 преобразуется в электрический сигнал. Демпфер 4 служит для гашения высокочастотных колебаний флюгера. Усилие, действующее на флюгер со стороны бровки нескошенного хлеба, зависит от жесткости растений, от плотности хлебостоя, поэтому при изменении плотности хлебостоя будут выдаваться ложные сигналы. Известна конструкция потенциометрических преобразователей для определения потерь зерна комбайном (рис. 1.37, в, г). К корпусу одной из клавиш соломотряса на конечном его участке шарнирно прикреплена плоская пластина 1, которая опирается на пружину 2 и соединяется рычажной передачей 3 с движком реостата 4. Отклонение пластины и соответствующее перемещение движка реостата зависят от количества находящегося на ней зерна. Такое же устройство (рис. 1.37, г) размещено в верхней головке колосового элеватора и служит для определения потерь зерна недомолотом. Тензометрические датчики Тензометрирование широко используют для измерения малых перемещений, деформаций деталей. Принцип действия тензорезисторов основан на явлении тензоэффекта – изменении величины активного сопротивления проводниковых и полупроводниковых материалов под воздействием приложенных к ним механических напряжений. Основной их характеристикой является коэффициент тензочувствительности К, определяемый как отношение изменения сопротивления D R / R изменению деформации D L / L. У большинства проволочных тензорезисторов К @ 2, а у полупроводниковых – К @ 100. Тензорезисторы бывают трех типов (рис. 1.38, а, б, в):проволочные на бумажной (типа 2ПКБ) и пленочной (типа 2ПКП) основе; фольговые прямоугольные (типа 2ФКПА и 2ФКПД), розеточные (типа 2ФКРВ, 2ФКРГ); полупроводниковые (типа КТД, КТДМ, КТЭ, КТЭМ, гедисторы Ю-8,Ю-12). Номинальный рабочий ток (допустимый) для проволочных тензорезисторов составляет примерно 30 мА, для фольговых – 0,5 А. Максимальная допустимая относительная деформация не превышает 0,3 %.
Рис.1.38. Тензометрические датчики К числу резисторных преобразователей относятся также угольные преобразователи (рис. 1.38, г). Принцип их действия основан на изменении контактного сопротивления R между частицами при изменении усилия Р. Характеристика R = f (P) угольного преобразователя нелинейна, т. е. он имеет переменную чувствительность. Поэтому выбирают рабочий диапазон с линейным участком характеристики. При измерениях включают либо по потенциометрической (рис. 1.39, а) либо по мостовой (рис. 1.39, б) схемам.
Рис.1.39. Схемы включения тензометрических датчиков Тензометрические измерительные устройства широко используют для измерений усилий, давлений, моментов. Электромагнитные датчики Принцип действия электромагнитных преобразователей основан на изменении индуктивности L магнитной системы под воздействием входной величины (перемещения, деформации, уровня, давления и т. п.). По виду преобразования электромагнитные устройства делятся на четыре группы: индуктивные, трансформаторные, магнитоупругие и индукционные. Индуктивные датчики преобразуют изменения регулируемой величины в изменение индуктивного сопротивления обмотки. Они работают на переменном токе и состоят из катушки индуктивности 1, сердечника 2 и якоря 3 (рис. 1.40, а).
Рис. 1.40. Электромагнитные датчики При перемещении якоря изменяется воздушный зазор d, индуктивность катушки и ее полное сопротивление переменному току Чувствительность индуктивного преобразователя обратно пропорциональна начальному зазору, т. е. Реверсивная схема включения (дифференциальный преобразователь), изображенная на рис. 1.40, д, г, является совокупностью двух нереверсивных схем при небольших отклонениях якоря. Выходной сигнал (ток, напряжение на нагрузке) в этом случае изменяется практически линейно, т. е. I = k d. При переходе якоря через нулевое положение фаза выходного напряжения меняется на 180º. Трансформаторные датчики являются разновидностью индуктивных. Принцип их действия основан на изменении взаимной индуктивности обмоток при перемещении относительно друг друга или при перемещении якоря датчика. Трансформаторные датчики являются генераторными и подразделяются на две основные группы в зависимости от способа изменения взаимной индуктивности: а) с перемещающимся или поворотным якорем (рис. 1.41, а, б, в); б) с поворотной (обмотка укреплена на поворотной рамке) или перемещающейся обмоткой (обмотка находится на якоре). Датчики этого типа позволяют получить любое напряжение на выходе нагрузки независимо от величины напряжения источника питания. Во вторичной обмотке W2 (рис. 1.41, а) датчика индуцируется ЭДС Е 2, величина которой находится в определенной зависимости от величины зазора d. При I = const: E 2 = w W 2 Ф = f (d), где w – угловая частота, Ф – магнитный поток.
На рис. 1.41, б приведена схема трехстержневого датчика с поворотным якорем. Первичная обмотка 1 питается от сети переменного тока. Вторичные обмотки 2 и 3 соединены последовательно и встречно. При нейтральном положении якоря магнитные потоки Ф1 и Ф2 равны, и напряжение на выходе равно нулю. Отклонение якоря в ту или другую сторону приводит к изменению магнитного сопротивления цепей потоков Ф2 и Ф1 и на выходе появляется напряжение, которое пропорционально отклонению якоря: U вых = k a. Для трансформаторного датчика соленоидного типа (рис. 1.41, в)
где хвх = (0,1 – 0,2) l.
Рис. 1.41. Трансформаторные датчики Чувствительность трансформаторных преобразователей составляет 0,5–3 мВ/мк на 1 В первичного напряжения. Для измерения угловых перемещений трансформаторные датчики выполняются часто в виде электрических машин (вращающиеся трансформаторы, сельсины), у которых первичная обмотка располагается на статоре, а вторичная – на роторе. Вращающиеся трансформаторы имеют по две перпендикулярные обмотки на статоре и роторе и приспособлены для работы в режиме синусно-косинусного вращающегося трансформатора и режима линейного вращающегося трансформатора. Разновидностью вращающихся трансформаторов являются сельсины – специальные индуктивные миниатюрные машины. Контактные и бесконтактные сельсины подразделяют на сельсины-датчики, сельсины-приемники, дифференциальные сельсины и сельсины-трансформаторы. В пазах ротора обычного сельсина уложена одна обмотка возбуждения, а в пазах статора – три обмотки синхронизации, магнитные оси которых сдвинуты на 120º одна относительно другой. У бесконтактных сельсинов обмотка возбуждения и обмотка синхронизации располагаются на статоре. Индуктивная связь между обмотками осуществляется с помощью вращающегося ротора. Сельсины используются в основном в двух режимах: индикаторном (рис. 1.41, г) и трансформаторном (рис. 1.41, д). Трансформаторный режим работы применяется при использовании сельсинов в качестве датчиков угла рассогласования следящих систем. В этом режиме выходное напряжение снимается с однофазной обмотки сельсина-приемника и при малых углах рассогласования U вых = k вх = k (aд – aп). Из этого выражения видно, что сельсины могут быть использованы в трансформаторном режиме как устройства, измеряющие разность угловых перемещений. В индикаторном режиме работы при повороте ротора сельсина-датчика под влиянием возникающего момента будет поворачиваться и ротор сельсина-приемника. Так как этот момент весьма мал, то индикаторный режим в системах автоматического управления не применяется. При повороте сельсином-приемником указателя какого-либо прибора (с малым моментом нагрузки) ошибка сельсинной передачи угла колеблется от 0,5 до 5º. В тех случаях, когда необходимо, чтобы угол поворота одного вала равнялся сумме углов поворота нескольких валов, используются дифференциальные сельсины. В роторе и статоре дифференциального сельсина уложено по три обмотки, магнитные оси которых сдвинуты на 120º. Магнитоупругие датчики (рис. 1.42) конструктивно представляют собой магнитные сердечники той или иной конфигурации с расположенными на них одной или несколькими обмотками.
Рис. 1.42. Магнитоупругие датчики Действие магнитоупругих датчиков основано на изменении магнитной проницаемости ферромагнитных тел, испытывающих воздействие сил или температуры (магнитоупругий эффект). На этом принципе строятся датчики для измерения усилий или температуры. Под действием нагрузки происходит одновременное изменение магнитной проницаемости и линейных размеров сердечника. Подобно тензорезисторам для этих датчиков определяют магнитоупругую чувствительность:
где Dm / m – относительное изменение магнитной проницаемости; D l / l – относительная деформация.
Для железоникелевых сплавов типа пермаллой k» 200–300, несколько ниже эти значения для мягких и кремнистых сталей. Нелинейность характеристики m = f (F)ограничивает рабочий диапазон магнитоупругих преобразователей в пределах 15–20 % от предела упругости материала. На рис. 1.42, г представлен магнитоупругий датчик для измерения деформации с помощью пермаллоевого провода 3, помещенного внутри соленоида 2 и связанного с деталью 1. Деформация пермаллоевого провода приводит к изменению индуктивности соленоида. Недостатком магнитоупругих преобразователей является зависимость магнитной проницаемости от температуры (погрешность составляет несколько процентов), величины тока в катушке, наличие в характеристике управления гистерезиса (погрешность около 1 %) и остаточных деформаций в железоникелевых сплавах. На рис. 1.42, б, в, д показаны схемы включения магнитоупругих датчиков. Последовательная схема (рис. 1.42, д) состоит из последовательно включенных постоянного резистора R и датчика Dp. Недостатком этой схемы является наличие большого начального напряжения, что сужает разрешающую способность измерителя. Для компенсации начального напряжения применяется дифференциальная схема включения (рис. 1.42, в), состоящая из двух цепей, в которые включены измерительный дроссель Dp и компенсационный Dpk. Индукционные датчики (рис. 1.43) относятся к типу генераторных. Принцип их действия основывается на явлении электромагнитной индукции – наведения ЭДС в электрическом контуре, в котором меняется магнитный поток. ЭДС Е наводится независимо от причины изменения магнитного потока Ф (перемещается ли магнит в неподвижной обмотке или обмотка в постоянном магнитном поле):
Индукционные преобразователи подразделяются на два типа: с катушкой, имеющей линейное или угловое перемещение относительно постоянного магнита (рис. 1.43, а), т. е. Е = k Ф dх / dt, и с ферромагнитной деталью, перемещающейся относительно неподвижных магнита и катушки. Для большинства индукционных преобразователей статическая характеристика Е = f (х; j) является линейной, погрешности составляют 0,5–1,5 %.
Рис. 1.43. Индукционные датчики К индукционным датчикам относятся также тахогенераторы постоянного (рис. 1.43, б, в) и переменного тока (рис. 1.43, г), которые представляют собой миниатюрную электрическую машину с независимым возбуждением от магнитов или обмотки возбуждения. Для тахогенератора постоянного тока поток возбуждения Ф остается неизменным, следовательно, высокое напряжение U вых, снимаемое со щеток тахогенератора, пропорционально скорости вращения вала. Поэтому тахогенераторы используются для определения угловых скоростей и ускорения. Датчик Холла Датчики магнитного поля в своем большинстве используют эффект Холла, открытый американским физиком Эдвином Холлом (E. Hall) в 1879 г. Эффект Холла состоит в следующем. Если проводник с током помещен в магнитное поле, то возникает ЭДС, направленная перпендикулярно и току, и полю. Эффект Холла иллюстрируется на рис. 1.44. По тонкой пластине полупроводникового материала протекает ток I. При наличии магнитного поля на движущиеся носители заряда (электроны) действует сила Лоренца. Эта сила искривляет траекторию движения электронов, что приводит к перераспределению объемных зарядов в полупроводниковой пластине. Вследствие этого на краях пластины, параллельных направлению протекания тока, возникает ЭДС, называемая ЭДС Холла.
Рис. 1.44. Иллюстация эффекта Холла Эта ЭДС пропорциональна векторному произведению индукции B на плотность тока j:
где d – ширина пластины, q – заряд частицы-носителя, n – концентрация носителей.
При снижении концентрации носителей ЭДС Холла возрастает, поэтому в качестве материала для датчиков Холла предпочтительно использование таких полупроводников, как кремний, арсенид галлия и др. Для прямоугольной пластины с однородными током и магнитным полем, направленными, как показано на рис. 1.44, эта ЭДС равна:
где k н – постоянная Холла, Vs – напряжение, создаваемое на токоподводящих выводах датчика Холла. Для кремния k н составляет величину по рядка 70 мВ/(В∙Тл), поэтому, как правило, ЭДС датчика Холла требуется усиливать. Датчик Холла (рис. 1.45) применяется в автомобиле-тракторострое-нии для определения углового положения газораспределительного механизма в соответствии с положением коленчатого вала двигателя. Информация, поступающая от датчика положения распределительного вала, используется системой управления двигателем для управления впрыском и зажиганием. Функционально датчик связан с датчиком частоты вращения коленчатого вала двигателя.
Рис. 1.45. Датчик Холла Принцип действия датчика Холла основан на изменении направления движения носителей заряда (изменении напряжения) в полупроводнике при изменении пересекающего его магнитного поля. Магнитное поле создается постоянным магнитом, расположенным в датчике. Изменение магнитного поля происходит при замыкании магнитного зазора репером (металлическим зубом). Репер располагается на зубчатом колесе распределительного вала или на специальном задающем диске, закрепленном на валу. При прохождении репера мимо датчика в нем возникает импульс напряжения, передаваемый в электронный блок управления. В зависимости от частоты вращения распределительного вала сигнал от датчика Холла поступает в разные промежутки времени. На основании этих сигналов блок управления двигателем распознает положение поршня первого цилиндра в верхней мертвой точке такта сжатия, обеспечивает впрыск бензина и зажигание топливно-воздушной смеси. На двигателях, оборудованных системой изменения фаз газораспределения, датчик положения распределительного вала используется для управления данной системой. Датчики устанавливаются на распределительных валах впускных и выпускных клапанов. Несколько иначе датчик Холла работает в системе управления дизельным двигателем. Здесь сигналы датчика используются для установления положения поршня каждого цилиндра двигателя в верхней мертвой точке такта сжатия. За счет этого достигается точное определение положения распределительного вала относительно коленчатого вала, соответственно быстрый пуск дизеля и устойчивая его работа на всех режимах. Для реализации данных функций внесены конструктивные изменения в задающий диск, на котором установлены реперы для каждого цилиндра двигателя. Это могут быть сегменты разной угловой ширины или набор зубьев, расположенных на разном расстоянии друг от друга. Так, в четырехцилиндровом дизеле на задающем диске устанавливается семь зубьев: четыре основных – по одному на каждый цилиндр под углом 90º и три дополнительных – для распознавания конкретного цилиндра. Дополнительные зубья расположены на разных расстояниях от основных зубьев, чем достигается установление положения поршня в верхней мертвой точке такта сжатия для конкретного цилиндра. При возникновении неисправности датчика Холла (отсутствии сигнала) система управления двигателем в своей работе использует информацию от датчика частоты вращения коленчатого вала. Двигатель продолжает работать и даже может повторно запускаться после остановки. Электронные датчики Электронный датчик (механотрон, рис. 1.46, а), преобразующий механические величины в электрический сигнал, представляют собой электронную лампу, отдельные электроды которой под влиянием внешних воздействий могут смещаться относительно других. Конструктивно механотрон представляет собой диод с перемещаемым анодом 2 или триод с перемещаемым анодом или сеткой. Механотрон выполняется так, чтобы под воздействием измеряемой величины (перемещения, усилия, ускорения) подвижный анод 2 перемещался параллельно неподвижному катоду 1. С увеличением расстояния между катодом и анодом напряженность электрического поля уменьшается, что приводит к уменьшению анодного тока. Свойства любого механотрона характеризуются чувствительностью к перемещению по току ki, напряжению ku и силе kp:
При измерениях необходимо, чтобы механотрон был защищен от прямых потоков теплого и холодного воздуха, а колебания окружающей температуры не превышали ±1 ºС и направление механического воздействия было перпендикулярно к плоскости анодов. Линейность выходной характеристики механотрона с точностью не ниже 1 % сохраняется при сопротивлении анодных нагрузок, большем внутреннего сопротивления каждого диода в 2–2,5 раза.
Рис. 1.46. Электронные датчики На рис. 1.46, б показана схема включения механотрона в измерительную цепь. На рис. 1.46, в представлен тиратронно-механический преобразователь для обнаружения растений. В исходном состоянии тиратрон 1 потушен, а конденсатор 2 заряжен до напряжения источника питания. В случае прикосновения электродов 3 к растению тиратрон зажигается, срабатывает электромагнитное реле 4, являющееся источником информации о наличии растений. В момент включения тиратрона конденсатор разряжается через тиратрон и катушку до уровня напряжения затухания. Затем тиратрон гаснет, реле выключается, а конденсатор заряжается через резистор 5 до напряжения источника, и схема возвращается в исходное состояние. Емкостные датчики Емкостные датчики (рис. 1.47) представляют собой конденсаторы с изменяющимся зазором d (см) между обкладками, площадью перекрытия пластин F (см2) или диэлектрической проницаемостью e (n Ф/см). Изменение входной величины вызывает изменение емкости конденсатора.
Рис. 1.47. Емкостные датчики Емкость плоского конденсатора С и его сопротивление Rc определяются формулами:
где f – частота питающей сети.
Емкостные преобразователи с переменным зазором между пластинами (рис. 1.47, а, б) служат для измерения линейных перемещений с точностью до 0,1–0,01 мкм; с переменной площадью (рис. 1.47, ж) для измерения линейных и угловых перемещений; с изменением диэлектрической проницаемости среды (рис. 1.47, в) – для измерения уровней, влажности, температуры, химического состава и пр. Для повшения точности измерения и чувствительности применяется дифференциальное устройство (рис. 1.47, г), емкости которого включены в соседние плечи мостовой схемы (рис. 1.47, д). На рис. 1.47, е показана резонансная схема включения. Пьезоэлектрические датчики Пьезоэлектрические датчики (рис. 1.48) используются в сельскохозяйственной автоматике при измерении усилий, давлений, вибраций, для ориентации машин и в других случаях.
Рис. 1.48. Пьезоэлектрические датчики: а, б – пьезоэлемент, работающий на сжатие, и его схема включения; в, г – элементы, работающие на изгиб; д – элемент, работающий на сдвиг В них используется пьезоэлектрический эффект, сущность которого заключается в том, что под действием приложенного усилия на гранях некоторых кристаллов (кварца, титаната бария, турмалина, сегнетовой соли и др.) появляются электрические заряды (прямой пьезоэффект). При внесении пьезоэлемента в электрическое поле он деформируется (обратный пьезоэффект). В пьезоэлементах различают три оси: оптическую Z и перпендикулярные к ней электрическую (пьезоэлектрическую) Х и механическую У. При действии силы Р вдоль оси Х (сжатие или растяжение), на гранях, перпендикулярных к оси X, возникают разнополярные электрические заряды Q (продольный пьезоэффект). При действии силы вдоль оси У на тех же гранях также возникают разнополярные электрические заряды (поперечный пьезоэффект). При действии силы вдоль оси Z пьезоэффект отсутствует. Знаки зарядов определяются направлением силы Р (растяжение или сжатие). Количественно пьезоэффект оценивается пьезомодулем k 0: при продольном пьезоэффекте: k 0 = QхlPх; при поперечном пьезоеффекте: Пьезоэлемент представляет собой пластину кристалла 1 с обкладками 2 на гранях fx (см. рис. 1.48, а). Напряжение между обкладками 2 при отсутствии нагрузки и без учета емкости измерительной схемы (см. рис. 1.48, б):
где e – диэлектрическая постоянная материала пластины; d – толщина пластины.
Промышленностью освоен выпуск пьезоэлементов на базе кварца и турмалина (ТБ-1, ТБК-3, ТБКС, НБС-1, ЦТС-19, ЦТС-23, ЦТБС-1, ЦТБС-3). Выпускаются пьезоэлементы, работающие на изгиб (см. рис. 1.48, в, г) и на сдвиг (см. рис. 1.48, д). Пьезоэлемент, работающий на изгиб, состоит из двух одинаковых, склеенных между собой балок или пластинок 1, между которыми находится металлическая фольга 2. При соответствующей поляризации элементов можно получить либо сумму напряжений (см. рис. 1.48, б), либо сумму зарядов (см. рис. 1.48, г). Пьезоэлементы, работающие на сдвиг, выполняют в виде колец 1, в которые вклеен внутренний электрод 2, вклеенных во внешний электрод 3. При такой конструкции пьезоэлементы обладают малой боковой чувствительностью. Если приложенная сила Рх постоянна, то с течением времени (t ®¥) происходит стекание заряда и напряжение на выходе изменяется по экспоненциальному закону. Поэтому пьезоэлектрические элементы применяют в основном для измерения усилий, изменяющихся с частотой выше 15 кГц. Выходное напряжение их обычно невелико, поэтому в системах автоматики они используются с усилителями. На рис. 1.48, е показан пьезоэлектрический преобразователь системы автоматического вождения зерноуборочных комбайнов по бровке нескошенного хлеба. В стержневом корпусе 1 установлены пьезоэлементы в виброзащитных блоках из резины. Их воспринимающие части 2 в виде игл с одним или несколькими зубьями выступают на величину до 1 мм через отверстия в корпусе. Механические колебания воспринимающей части 2 вызывают появление механических напряжений в пьезоэлементе, вследствие которых возникает пропорциональная им ЭДС на основе пьезоэффекта. Преобразователь устанавливается на левом полевом делителе жатки комбайна под углом jд к продольной оси комбайна на высоте примерно 0,6 высоты растений. 11. Фотоэлектрические датчики Широкое применение при автоматизации различных производственных процессов находят фотоэлектрические устройства, преобразующие световой поток в электрический сигнал. В настоящее время выпускают три вида таких преобразователей: с внешним фотоэффектом (вакуумные или газонаполненные, рис. 1.49, а); с внутренним фотоэффектом (фотосопротивления, рис. 1.49, б) и вентильные (полупроводниковые, рис. 1.49, в). Основными характеристиками фотоэлементов являются: – световая – зависимость фототока от освещенности I ф = f (Ф) (рис.1.49); – спектральная – зависимость чувствительности S l от длины волны l падающих лучей S l =f (l); – вольт-амперная – зависимость фототока от величины напряжения, поступающего на фотоэлемент I ф =f (U); – частотная – зависимость чувствительности от частоты изменения светового потока.
Рис. 1.49. Фотоэлектрические датчики Фотоэлементы с внешним фотоэффектом (рис. 1.49, а) представляют собой вакуумную или газонаполненную лампу, на внутреннюю стенку которой нанесен фоточувствительный слой, являющийся катодом. Под действием светового потока в катоде возникают свободные электроны, которые под действием электрического поля перемещаются к аноду, создавая внутри фотоэлемента ток (фототок). Фотоэлементы с внутренним фотоэффектом (рис. 1.49, б) представляют собой фотосопротивления (фоторезисторы), принцип действия которых состоит в том, что свободные электроны, образующиеся под действием светового потока в слое светочувствительного проводника 2, остаются (перераспределяются) в веществе, резко изменяя его сопротивление. Светочувствительный материал наносится на изоляционную подложку 3 и сверху покрыт защитной тонкой прозрачной лаковой пленкой 1. Наиболее часто применяются сернисто-кадмиевые (ФС-К), сернисто-свинцовые (ФС-А), сернисто-висмутовые (ФС-Б) и селенисто-кадмиевые (ФС-Д) фоторезисторы. Фотоэлементы с вентильным фотоэффектом (рис. 1.50, в) работают на использовании явления, происходящего в переходе р – п под воздействием светового потока. Они состоят из металлического основания 5, выполняющего роль нижнего электрода, слоя полупроводника 4, запирающего слоя 3, полупрозрачного слоя металла 2 и контактного кольца 1. На рис. 1.50, д показан фотоэлектрический преобразователь бровки нескошенного хлеба, применяемый в системах автовождения комбайнов. При движении комбайна бровка находится между источником инфракрасного излучения и приемником 2. Электрический сигнал на выходе приемника 2 пропорционален толщине слоя растений между излучателем и приемником. Выходной сигнал приемника 8, расположенного выше растений, не зависит от смещения бровки и используется для компенсации влияния общей освещенности в поле на сигнал приемника 2. В качестве приемников 2 и 3 используют фоторезисторы. Недостатком преобразователя является то, что при изменении плотности хлебостоя или его высоты формируются ложные сигналы. На рис. 1.50, е показано трехпозиционное оптическое устройство обнаружения бровки нескошенного хлеба для автоматического направления самоходного зернового комбайна. Оно содержит источник света 3 и два фоторезистора 1 и 2, которые при движении комбайна расположены по обе стороны бровки. В устройстве обнаружения рядка растений системы автовождения пропашного агрегата (рис. 1.50, ж) при отклонении агрегата в сторону поворачиваются жестко связанные с ним и между собой источники света 1, 2 и фотосопротивления 3, 4. При этом луч света между соответствующим источником и приемником перекрывается растениями рядка и на выходе усилителя 5 или 6 изменяется сигнал, вызывающий срабатывание исполнительного механизма 7 или 8. Такое устройство может быть использовано, когда растения обладают достаточной высотой, чтобы перекрывать луч между источником и приемником, расположенными над почвой.   ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|



 .
. . Поэтому индуктивные устройства особенно чувствительны при малых значениях входной величины и реагируют на ее изменения при 0,1–0,5 мкм. Статическая характеристика индуктивного преобразователя I = f (d) (рис. 1.40, б) имеет изгибы в точках А и Б, поэтому величину первоначального зазора d0 следует выбирать в середине прямолинейного участка. Для устройства, изображенного на рис. 1.40, а, входное перемещение допускается от 0,01 до 5 мм, а для соленоидного преобразователя (рис. 1.40, в, д) от 3 до 100 мм.
. Поэтому индуктивные устройства особенно чувствительны при малых значениях входной величины и реагируют на ее изменения при 0,1–0,5 мкм. Статическая характеристика индуктивного преобразователя I = f (d) (рис. 1.40, б) имеет изгибы в точках А и Б, поэтому величину первоначального зазора d0 следует выбирать в середине прямолинейного участка. Для устройства, изображенного на рис. 1.40, а, входное перемещение допускается от 0,01 до 5 мм, а для соленоидного преобразователя (рис. 1.40, в, д) от 3 до 100 мм. ,
,
 ,
, .
.

 ,
,
 ,
,


 ,
, ,
,

 ,
,