|
|
Схемы управления с помощью магнитных контроллеровМагнитные контроллеры серии ТА, ТСА, К, КС предназначены для управления крановыми асинхронными двигателями с фазным ротором серии МТ, МТН. Контроллеры типов К, КС применяются в крановых электроприводах металлургического производства, работающих в режимах Л, С, Т, ВТ, ОТ; контроллеры типов ТА, ТСА — в электроприводах кранов общего назначения, работающих в режимах Л и С. Контроллеры серий ТСА, КС используются в электроприводах механизмов подъема, а также механизмов грейфера; контроллеры серий ТА и К — в основном в электроприводах механизмов горизонтального передвижения (передвижение моста крана и тележки). Контроллеры ДК, ДКС, ДТА предназначены для управления двумя двигателями одновременно (дуплексные, двухдвигательные приводы).
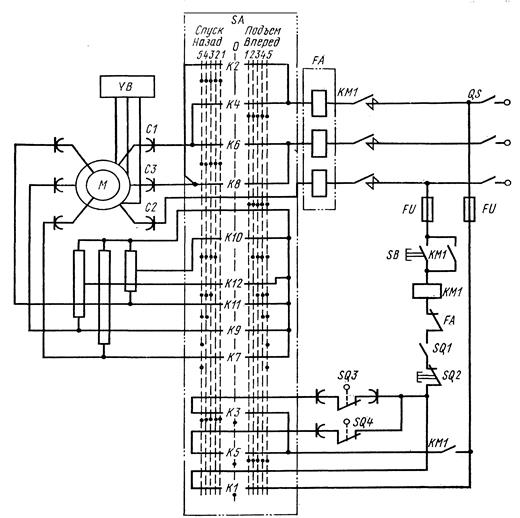
Рис 3.1.30. Схема кулачкового контроллера ККТ-61А
Взамен контроллеров серий КС и ТСА внедряются контроллеры серий ТСД, КСДБ, в которых использован принцип динамического торможения с самовозбуждением и использованы тиристорные коммутаторы в силовой цепи. Для управления двигателями постоянного тока последовательного возбуждения, работающими в режимах Л, С, Т, ВТ, ОТ, используются магнитные контроллеры серий П, ПС; контроллеры серий П — в электроприводах механизмов горизонтального передвижения и серии ПС — в электроприводах механизмов подъема. Все схемы контроллеров обеспечивают автоматический пуск (в функции времени), реверсирование, торможение и ступенчатое регулирование скорости (реостатное). Диапазон регулирования скорости 3:1—4:1. Главная цепь контроллеров переменного тока выполняется на напряжение 220 и 380 В; цепь управления — на постоянном токе напряжением 220 В или переменном напряжении, равном напряжению главной цепи (контроллеры ТА, ТСА). Типовая схема магнитного контроллера типа К, предназначенного для управления механизмами передвижения, приведена на рис. 3.1.31. Напряжение к обмотке статора подводится через контакты рубильника QS1, линейного контактора КМ1 и контакты контакторов КМ2 и КМЗ, задающих направление движения. Последовательно в эту цепь включены катушки реле максимального тока FА, а параллельно обмотке статора через контакты контакторов KM7, КМ8 подключается трехфазный электромагнит механического тормоза YМ. В роторную цепь двигателя включены пять ступеней пускорегулировочного реостата, четыре из которых могут быть замкнуты контактами контакторов КМ9—КМ12, а пятая ступень представляет собой невыключаемую добавочную ступень. Цепи защиты и блокировок выполнены на переменном токе с помощью реле KV; здесь можно видеть нулевую блокировку (нулевой контакт командоконтроллера SA, шунтированный контактом реле КV), конечную защиту (контакты конечных выключателей SQ1 и SQ2, шунтированные контактами контакторов соответственно KM2, КМЗ и контактом КМ8), максимальную защиту (контакт FА). Панель предназначена для кранов с тяжелым режимом работы, поэтому схема управления выполнена на постоянном токе. Использование контакторов постоянного тока при этом обеспечивает более высокую надежность и долговечность работы электрооборудования. Питание цепей управления осуществляется от источника постоянного тока через предохранители FU3 — FU6, для контроля исправности которых в цепь реле КV введены замыкающие контакты КМ8 и КТ2. Ступенчатое реостатное регулирование скорости и момента электропривода осуществляется с помощью контактов К2—К6 командоконтроллера 5Л, причем контакты К2 и КЗ служат для задания направления движения, а остальные имеют симметричную диаграмму замыкания и используются для включения и отключения ступеней пускорегулировочного реостата с помощью контакторов КМ9—КМ12. Механические характеристики, соответствующие положениям командоконтроллера при движении вперед, показаны на рис. 31.32. Такое же семейство характеристик обеспечивается и при работе в противоположном направлении. Как показано на рис. 3.1.32, при характерных для механизмов передвижения пределах изменения нагрузки диапазон регулирования скорости D =2-2,5. Схемой предусматривается автоматическое управление процессами реостатного пуска электропривода и его торможения противовключением. При этом приняты меры для обеспечения удовлетворительной плавности протекания переходных процессов и ограничения динамических нагрузок передач при выборе зазоров. В нулевом положении командоконтроллера предусмотрен свободный выбег электропривода без наложения механического тормоза. Рассмотрим эти важные особенности схемы.
Рис. 3.1.31. Схема магнитного контроллера К
Рис. 3.1.32 Механические характеристики двигателя, управляемого магнитным контроллером К
При быстрой перестановке командоконтроллера из положения О в положение 4 «Вперед» включаются контакторы КМ2 и КМ1 и к статорной обмотке двигателя подводится напряжение сети. Вспомогательный замыкающий контакт контактора КМ1 подключает через резистор R5 катушку реле противовключения КU к питающему схему управления напряжению U у. К точкам а и б резистора R5 подключен диодный мост VD1—VD4, питающийся от напряжения роторной цепи. Благодаря этому между точками а и б создается пропорциональное э. д. с. ротора Е2 падение напряжения Uаб, направленное встречно по отношению к U у. Прм этом напряжение U ku прикладываемое к цепи катушки KU: U ku= U у - Uаб= U у- kE2номS;
где E2ном — э. д. с. ротора при S =1 и U1=U1ном; S — скольжение. Коэффициент k устанавливается таким, что при пуске (Sнач =1) напряжение Uки достаточно для включения реле KU. Включаясь, реле КU замыкающим контактом через контакт командоконтроллера К4 подает напряжение на катушку контактора КМ9, который своими главными контактами выводит первую ступень реостата в цепи ротора, а вспомогательными включает контакторы КМ8 и КМ7 электромагнита тормоза и отключает катушку реле КТ1. Реле времени КТ1 отсчитывает выдержку времени, в течение которой электропривод ускоряется под действием момента, определяемого характеристикой 2 на рис.3.1.32. По истечении выдержки времени реле КТ1 его контакт в цепи катушки КМ10 замыкается. Контактор КМ10 включается, выводит вторую ступень роторного реостата, становится на самопитание, включает реле КТ2 и размыкает цепь катушки реле КТ1. В течение выдержки времени реле КТ2 электропривод ускоряется, работая на характеристике 3 (рис.3.1.32), затем включается контактор KM11, выводит третью ступень реостата и размыкает цепь катушки реле КТ1. Реле КТ1 вновь отсчитывает выдержку времени, в течение которой происходит пуск с промежуточной пусковой характеристикой 4А. Далее включением контактора КМ12 электропривод выводится на основную характеристику 4. В роторной цепи при этом остается невыключаемая ступень реостата, обеспечивающая требуемые условия ограничения тока и момента при данном числе контакторов ускорения. Пусковая диаграмма на рис. 3.1.32 показывает, что характеристика 2 обеспечивает пониженный пусковой момент, требуемый для плавного выбора зазоров, который осуществляется в течение выдержки времени реле КТ1. Затем происходит пуск электропривода с максимальным пусковым моментом М1 в две ступени под контролем реле КТ2 и КТ1. Таким образом, реле КТ1 используется при пуске дважды: его выдержка времени выбирается равной времени разгона на промежуточной характеристике 4А, поэтому она меньше, чем выдержка времени реле КТ2. Этой выдержки времени достаточно и для выбора зазоров, так как после выбора зазоров существенного увеличения скорости на этой ступени не требуется (отрезок аб на характеристике 2 рис.3.1.32). Включившийся в начале пуска электромагнит тормоза YМ при дальнейшей работе остается постоянно включенным, так как контактор КМ8 становится на самопитание. Поэтому при установке командоконтроллера в нулевое положение механический тормоз не накладывается и снижение скорости происходит в режиме выбега под действием тормозного момента нагрузки. Отказ от использования механического тормоза для оперативного торможения устраняет рывки, обусловленные его наложением, и повышает плавность торможения. При этом тормоз накладывается только при срабатывании предусмотренных защит или при нажатии аварийной кнопки SQ1. Для увеличения интенсивности торможения оператор имеет возможность использовать торможение противовключением путем перестановки командоконтроллера, например, из крайнего положения «Вперед» в крайнее положение «Назад». Контакторы КМ2 и КМ4 при этом отключаются, а контактор КМЗ включается и переводит двигатель в режим противовключения с полностью включенным реостатом в цепи ротора (характеристика 1 на рис. 3.1.32). Следует отметить, что рассмотренный магнитный контроллер при необходимости комплектуется тормозным электромагнитом постоянного тока. В этих случаях трехфазный тормозной электромагнит УМ из схемы исключается и последовательно с реле КА включается катушка УМ1 постоянного тока (показано на рис. 3.1.32 штриховой линией). Форсирование процесса нарастания тока электромагнита У М1 при его включении обеспечивается шунтированием резистора R6 замыкающим контактом КМ7. При токе, равном номинальному, срабатывает реле КА и разрывает цепь катушки КМ7, контакт которого размыкаясь, вводит последовательно с обмоткой УМ1 резистор R6.   ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|