|
|
Параллельное соединение звеньевСтр 1 из 6Следующая ⇒ Параллельное соединение звеньев При параллельном соединении звеньев входные координаты всех звеньев равны, а выходные суммируются (рис.1.23). Для построения статической характеристики параллельных звеньев необходимо в одной системе координат с одинаковым масштабом построить статические характеристики отдельных звеньев и их ординаты сложить (рис.1.24).
5.
При линейных статических характеристиках:
Хвых2 = к2 · Хвх2, Хвых3 = к3 · Хвх3, (1.35) …………………. Хвых = (к1 + к2 + к3+…+ кn) Хвх = К · Хвх
Статический коэффициент передачи параллельно соединенных звеньев равен сумме коэффициентов передачи отдельных звеньев: К = (к1 + к2 + к3+…+ кn) (1.36)
Последовательное соединение звеньев При последовательном соединении направленных звеньев выходные координаты предыдущего звена являются входными координатами последующего. Для построения результирующей характеристики строятся отдельные характеристики в разных квадрантах. Наиболее простым является построение в случае трех звеньев (рис.1.25). В первом квадранте построена статическая характеристика Хвых1 = ƒ (Хвх1) первого звена, во втором квадранте построена характеристика второго звена, в третьем – третьего. Зададимся некоторым значением Хвх1 (точка 1), ему соответствует Хвых 1, которое равно Хвх2 и т.д.
При последовательном соединении линейных звеньев (частный случай):
Хвых2 = к2 Хвх2, (1.37) Хвых3 = к3 Хвх3, результирующая характеристика Хвых3 = к1к2к3Хвх1 Таким образом, в случае последовательного соединения линейных звеньев коэффициент передачи системы К равен произведению коэффициентов передач отдельных звеньев: К = к1к2к3 (1.38) Б) Пространство состояние (матричные примеры) Пространство состояний — в теории управления один из основных методов описания поведения динамической системы. Движение системы в пространстве состояний отражает изменение ее состояний. В пространстве состояний создаётся модель динамической системы, включающая набор переменных входа, выхода и состояния, связанных между собой дифференциальными уравнениями первого порядка, которые записываются в матричной форме. В отличие от описания в виде передаточной функции и других методов частотной области, пространство состояний позволяет работать не только с линейными системами и нулевыми начальными условиями. Кроме того, в пространстве состояний относительно просто работать с MIMO-системами. Для случая линейной системы с
где
Часто матрица Для дискретных систем запись уравнений в пространстве состояний основывается не на дифференциальных, а на разностных уравнениях.
Нелинейные системы Нелинейная динамическая система n-го порядка может быть описана в виде системы из n уравнений 1-го порядка:
или в более компактной форме:
Первое уравнение — это уравнение состояния, второе — уравнение выхода. Линеаризация В некоторых случаях возможна линеаризация описания динамической системы для окрестности рабочей точки В установившемся режиме
Вводя обозначения:
Разложение уравнения состояния
При взятии частных производных вектор-функции
Аналогично для функции выхода:
Учитывая
где
Типовые динамические звенья
Таблица 2 (продолжение)
Таблица 2 (окончание)
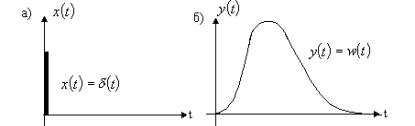
Отметим общие закономерности звеньев. Если коэффициенты У звеньев № 1, 5, 7 только два коэффициента не равны нулю. Они являются простейшими или элементарными. Все остальные могут быть образованы из элементарных путем последовательного, параллельного и встречно-параллельного соединения. Рассмотрим свойства звеньев № 1-8. Характеристики остальных звеньев № 9, 12 могут быть получены как характеристики различных соединений звеньев № 1-8. При рассмотрении указанных звеньев будут приведены следующие характеристики: · уравнение звена и пример его физического представления; · частотные характеристики; · кривая разгона и импульсная переходная функция. Временные характеристики есть реакция звена (элементов и т.д.) на апериодическое типовое воздействие. Реакция звена во времени на ступенчатое единичное воздействие 1(t) при нулевых начальных условиях называется переходной характеристикой (функцией), или кривой разгона, и обозначается через h(t). Реакция звена во времени на Эти характеристики приведены на рис. 24 и 25.
Рис. 24. Входное ступенчатое единичное воздействие (а)
Рис. 25. Входное воздействие в виде Переходные и импульсные переходные функции связаны между собой соотношениями: При помощи импульсной функции звена можно определить его реакцию на произвольное входное воздействие. Связь между входной и выходной величинами устанавливается интегралом Дюамеля (интегралом свертки): или Переходная функция h(t) звена представляет собой решение неоднородного дифференциального уравнения звена при Она состоит из двух составляющих: где где В выражении передаточной функции звена знаменатель также представляет собой характеристическое уравнение, корни которого называются полюсами. Корни числителя передаточной функции называются нулями. При значениях параметра P, равных нулям, передаточная функция W(P) обращается в ноль, а при значениях параметра P, равных полюсам, передаточная функция W(P) обращается в
20.Интегрирующее звено. Звено описывается дифференциальным уравнением
(2.60)
или, в операторной форме
(2.61)
Переходная функция интегрирующего звена
(2.62)
Звено относится к астатическим блокам и поэтому не имеет статической характеристики.
Рис. 2.11. Переходная функция интегрирующего звена
Примеры: элементы механических систем (см. движение материальной точки, пример 2.3), описываемые уравнениями динамики вида
и кинематическими уравнениями
электронные интеграторы (
21.Идеальное дифференциальное звено Звено описывается дифференциальным уравнением
(2.63)
или, в операторной форме,
(2.64)
Переходная функция дифференцирующего звена -
(2.65)
а реакция звена на линейно-нарастающий сигнал x2=t -
(2.66)
При x2 = const для любых t>0 выполняется
Рис. 2.12. Реакция дифференцирующего звена
Примеры: тахогенератор (электромашинный датчик скорости), электронный дифференциатор (
Замечание 2.4. Выходом дифференцирующего звена является производная входного сигнала, т.е. его мгновенная скорость dx2/dt. Операция нахождения текущего значения скорости x1(t)=dx2(t)/dt только по информации об известном в данный момент времени t сигнале x2(t) физически не реализуема и поэтому идеальных дифференцирующих звеньев не существует. Тем не менее производная может быть приближенно рассчитана как
22.Реальное дифференцирующее звено. Звено описывается уравнением
(2.67)
или, в операторной форме,
(2.68)
Переходная функция звена имеет вид
Рис. 2.13. Переходная функция реального дифференцирующего звена
(2.69)
а реакция звена на линейно-нарастающий сигнал x1=t совпадает с переходной функцией апериодического звена, т.е.
(2.70)
При x2 =const и
При достаточно малых постоянных времени T, характеристики звена приближаются к характеристикам идеального дифференцирующего звена (см. Замечание 2.4).
Рис. 2.14. Реакция реального дифференцирующего звена
Примеры: CR и RL цепи.
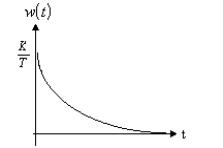
23.Инерционное звено 1-го порядка. Инерционное звено первого порядка описывается уравнением: Его переходная функция (кривая разгона): Импульсная функция: Кривая разгона и импульсная переходная функция инерционного звена первого порядка приведены соответственно на рис. 30 и 31.
Рис. 30. Кривая разгона инерционного звена первого порядка
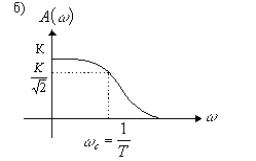
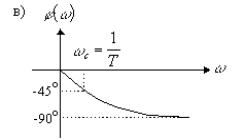
Рис. 31. Импульсная переходная функция Преобразуем (101) по Лапласу: Передаточная функция: АФХ: Запишем Графики АФХ, АЧХ, ФЧХ приведены на рис. 32, а, б, в. Инерционными звеньями первого порядка являются конструктивные элементы, которые могут накапливать энергию или вещество, и обладающие свойством без изменения внешних воздействий приходить в установившееся состояние (самовыравниванием). Примеры инерционных звеньев первого порядка приведены на рис. 33. Запишем RC и LR четырехполюсников. Для емкости имеет место соотношение: Или в преобразованном по Лапласу виде при нулевых начальных условиях: Из (113) получим выражение комплексного емкостного сопротивления:
Рис. 32. Частотные характеристики инерционного звена Для индуктивности имеет место соотношение: или в преобразованном по Лапласу виде при нулевых начальных условиях: а)
б)
Рис. 33. RС и LR – четырехполюсники – инерционные звенья Из (116) получим выражение комплексного индуктивного сопротивления: Теперь запишем выражение выходного напряжения для RC – четырехполюсника: Так как то с учетом (114) и (119) выражение (118) принимает вид: Введя обозначение T=RC, из (120) получим: Аналогично запишем выражение выходного напряжения для LC-четырехполюсника: Так как то с учетом (117) и (123) выражение (122) примет вид: Введя обозначение
24.Звенья второго порядка. В общем случае описываются уравнением
Перейдем к изображениям по Лапласу:
Отсюда определяем передаточную функцию:
Однако общепринята запись передаточной функции звеньев второго порядка в другом виде:
где Звенья второго порядка, таким образом, характеризуются тремя параметрами. Это коэффициент передачи, постоянная времени и коэффициент демпфирования x. В зависимости от величины коэффициента демпфирования различают типы звеньев: колебательное (0<x<1), консервативное (x=0) и апериодическое второго порядка (x³1). Рассмотрим свойства колебательного звена. Выражения для его частотных функций имеют следующий вид:
Асимптотическая ЛАЧХ строится тем же приемом, что и для апериодического звена. В области низких частот Tw<<1 и в подкоренном выражении всеми членами, кроме 1, можно пренебречь. Тогда низкочастотная асимптота G(w)нч принимает вид G(w)нч»20lgk. В области высоких частот G(w)вч»20lgk-20lg(Tw)2=20lgk-40lgTw. Эта асимптота имеет наклон минус 40 дБ/дек. Сопрягаются асимптоты на частоте
Асимптотическая ЛАЧХ 20lgk -40 дБ/дек
0 lgw
j(w) Рис.2.17
Точная ЛАЧХ
В районе Представление о динамических свойствах звена можно получить из переходной характеристики, представленной на рис.2.18.
h(t)
  
Рис.2.18
Примером звена второго порядка может служить колебательный контур (см. схему на рис.2.5 и вывод передаточной функции в примере 2.4). Консервативное звено - частный случай колебательного звена, когда отсутствует демпфирование. Если обратиться к приведенному выше примеру (см. рис.2.5), то должны отсутствовать потери в контуре (выполняться условие R=0). В этом случае колебания стали бы незатухающими, и переходная характеристика описывалась бы выражением:
На сопрягающей частоте ЛАЧХ консервативного звена имеет всплеск бесконечной амплитуды, т.е. претерпевает разрыв, а ЛФЧХ из нулевого значения скачком достигает значения минус p. При x ³ 1 передаточную функцию звена второго порядка можно преобразовать следующим образом:
где То есть апериодическое звено второго порядка не является типовым или элементарным, так как его можно представить двумя последовательно соединенными более простыми звеньями - апериодическими первого порядка. Пример 2.7. Определить, при каком соотношении параметров элементов схемы колебательный контур (см. рис.2.5) является колебательным звеном. Запишем полученную в примере 2.4 передаточную функцию с использованием коэффициента демпфирования:
Отсюда выразим коэффициент демпфирования:
Звено будет колебательным, если z<1, т.е.
В противном случае, т.е. при
контур будет являться апериодическим звеном второго порядка. При этом следует обратить внимание на то, что лишь с позиций математического описания схему можно представить как последовательное соединение двух апериодических звеньев первого порядка. Расчленить же принципиальную схему на два участка, каждый из которых был бы соответствующим апериодическим звеном первого порядка, невозможно.
25. Звено с опаздываем. А) Обратные связи Параллельное соединение звеньев При параллельном соединении звеньев входные координаты всех звеньев равны, а выходные суммируются (рис.1.23). Для построения статической характеристики параллельных звеньев необходимо в одной системе координат с одинаковым масштабом построить статические характеристики отдельных звеньев и их ординаты сложить (рис.1.24).
5.
При линейных статических характеристиках:
Хвых2 = к2 · Хвх2, Хвых3 = к3 · Хвх3, (1.35) …………………. Хвых = (к1 + к2 + к3+…+ кn) Хвх = К · Хвх
Статический коэффициент передачи параллельно соединенных звеньев равен сумме коэффициентов передачи отдельных звеньев: К = (к1 + к2 + к3+…+ кn) (1.36)
  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|


 Хвых1 = к1 · Хвх1,
Хвых1 = к1 · Хвх1, При последовательном соединении более трех звеньев сначала проводится их комбинация по три, находятся характеристики групп по три звена в каждой и аналогичным способом находится затем уже характеристика соединения.
При последовательном соединении более трех звеньев сначала проводится их комбинация по три, находятся характеристики групп по три звена в каждой и аналогичным способом находится затем уже характеристика соединения.


 Хвых1 = к1 Хвх1,
Хвых1 = к1 Хвх1, входами,
входами,  выходами и
выходами и  переменными состояния описание имеет вид:
переменными состояния описание имеет вид:

 ;
;  ;
;  ;
; ,
,  ,
,  ,
,  ,
,  .
. — вектор состояния, элементы которого называются состояниями системы
— вектор состояния, элементы которого называются состояниями системы — вектор выхода,
— вектор выхода, — вектор управления,
— вектор управления, — матрица системы,
— матрица системы, — матрица управления,
— матрица управления, — матрица выхода и
— матрица выхода и — матрица прямой связи.
— матрица прямой связи.






 .
. для рабочей точки
для рабочей точки  справедливо следующее выражение:
справедливо следующее выражение:


 в ряд Тейлора, ограниченное первыми двумя членами даёт следующее выражение:
в ряд Тейлора, ограниченное первыми двумя членами даёт следующее выражение:
 по вектору переменных состояний
по вектору переменных состояний  и вектору входных воздействий
и вектору входных воздействий  получаются матрицы Якоби соответствующих систем функций:
получаются матрицы Якоби соответствующих систем функций:

 , линеаризованное описание динамической системы в окрестности рабочей точки примет вид:
, линеаризованное описание динамической системы в окрестности рабочей точки примет вид:





















 и
и  , то звенья имеют однозначную связь между входной и выходной величиной в статическом режиме. Они называются статическими, или позиционными. Звенья, у которых
, то звенья имеют однозначную связь между входной и выходной величиной в статическом режиме. Они называются статическими, или позиционными. Звенья, у которых  ,
,  ,
,  -функцию при нулевых начальных условиях называется импульсной переходной характеристикой (функцией). Она обозначается через
-функцию при нулевых начальных условиях называется импульсной переходной характеристикой (функцией). Она обозначается через  .
.
 , (88)
, (88) . (89)
. (89)
 . (90)
. (90) и при
и при  для i=1... n.
для i=1... n. , (91)
, (91) – возмущенная составляющая, определяемая частным решением неоднородного уравнения и равна
– возмущенная составляющая, определяемая частным решением неоднородного уравнения и равна  ;
;  – свободная составляющая, определяемая частным решением соответствующего однородного дифференциального уравнения в виде:
– свободная составляющая, определяемая частным решением соответствующего однородного дифференциального уравнения в виде: , (92)
, (92) – постоянные интегрирования, определяемые из начальных условий. Заметим, что собственный оператор D(p) представляет собой характеристическое уравнение, корни которого
– постоянные интегрирования, определяемые из начальных условий. Заметим, что собственный оператор D(p) представляет собой характеристическое уравнение, корни которого  есть
есть  в выражении (92).
в выражении (92). .
.

 .
. .
.
 ,
, ;
; ) и т.д.
) и т.д.
 .
. ,
, .
. и, следовательно, статической характеристикой звена является прямая
и, следовательно, статической характеристикой звена является прямая  .
.
 на линейно нарастающее воздействие
на линейно нарастающее воздействие 
 ).
). 1(t)=D x2(t)/D t, где D t - интервал времени, D x2 -соответствующее приращение сигнала x2. При уменьшении интервала D t можно получить значение
1(t)=D x2(t)/D t, где D t - интервал времени, D x2 -соответствующее приращение сигнала x2. При уменьшении интервала D t можно получить значение  .
.

 ,
, .
. выполняется
выполняется 
 . (101)
. (101) . (102)
. (102) . (103)
. (103)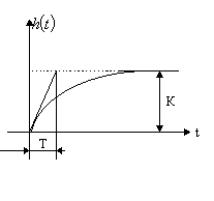
 . (104)
. (104) . (105)
. (105) , (106)
, (106) , (107)
, (107) . (108)
. (108) в алгебраической форме:
в алгебраической форме: , (109)
, (109) , (110)
, (110) . (111)
. (111) . (112)
. (112) . (113)
. (113) . (114)
. (114)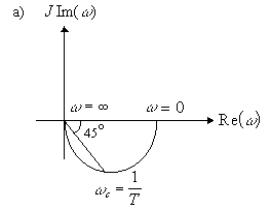
 (115)
(115) . (116)
. (116)




 . (117)
. (117) . (118)
. (118) , (119)
, (119) . (120)
. (120) . (121)
. (121) . (122)
. (122) , (123)
, (123) . (124)
. (124) , из (124) получим:
, из (124) получим:










 (
( и в подкоренном выражении можно оставить лишь
и в подкоренном выражении можно оставить лишь  , пренебрегая остальными членами. Высокочастотная асимптота G(w)вч описывается формулой:
, пренебрегая остальными членами. Высокочастотная асимптота G(w)вч описывается формулой: , как показано на рис.2.17.
, как показано на рис.2.17. G(w) Точная ЛАЧХ
G(w) Точная ЛАЧХ lg 1/T
lg 1/T
 несколько отличается от асимптотической
несколько отличается от асимптотической  . Максимальная ошибка - в районе около сопрягающей частоты. Для упрощенных расчетов можно считать, что наибольшая ошибка будет при
. Максимальная ошибка - в районе около сопрягающей частоты. Для упрощенных расчетов можно считать, что наибольшая ошибка будет при  :
:


 точная ЛАЧХ идет ниже асимптотической при
точная ЛАЧХ идет ниже асимптотической при  и выше - при
и выше - при  . При значениях
. При значениях  ошибка становится существенной (более трех децибел) и ее необходимо учитывать, используя приведенную выше формулу либо поправочные кривые из справочной литературы.
ошибка становится существенной (более трех децибел) и ее необходимо учитывать, используя приведенную выше формулу либо поправочные кривые из справочной литературы.







 k
k







 0 t
0 t