|
|
Понятие структурной устойчивости. АФЧХ астатических САУ
САУ может быть неустойчивой по двум причинам: неподходящий состав динамических звеньев и неподходящие значения параметров звеньев. САУ, неустойчивые по первой причине называются структурно неустойчивыми. Это означает, что изменением параметров САУ нельзя добиться ее устойчивости, нужно менять ее структуру. Например, если САУ состоит из любого количества инерционных и колебательных звеньев, она имеет вид, показанный на рис.72 Если САУ астатическая, то при ее размыкании характеристическое уравнение можно представить в виде: p
W(j
Так как порядок знаменателя больше порядка числителя, то при Так как АФЧХ терпит разрыв, трудно сказать, охватывает ли она точку (-1,j0). В этом случае пользуются следующим приемом: если АФЧХ терпит разрыв, уходя в бесконечность при Если САУ имеет два интегрирующих звена (порядок астатизма
W(j
При Структурно неустойчивую САУ можно сделать устойчивой, включив в нее корректирующие звенья (например, дифференцирующие или форсирующие) или изменив структуру САУ, например, с помощью местных обратных связей.
Понятие запаса устойчивости
В условиях эксплуатации параметры системы по тем или иным причинам могут меняться в определенных пределах (старение, температурные колебания и т.п.). Эти колебания параметров могут привести к потере устойчивости системы, если она работает вблизи границы устойчивости. Поэтому стремятся спроектировать САУ так, чтобы она работала вдали от границы устойчивости. Степень этого удаления называют запасом устойчивости. Согласно критерия Найквиста, чем дальше АФЧХ от критической точки (-1, j0), тем больше запас устойчивости. Различают запасы устойчивости по модулю и по фазе. Запас устойчивости по модулю характеризует удаление годографа АФЧХ разомкнутой САУ от критической точки в направлении вещественной оси и определяется расстоянием h от критической точки до точки пересечения годографом оси абсцисс (рис.75). Запас устойчивости по фазе характеризует удаление годографа от критической точки по дуге окружности единичного радиуса и определяется углом
Обычно при создании САУ задаются требуемыми запасами устойчивости h и
Анализ устойчивости по ЛЧХ
Оценку устойчивости по критерию Найквиста удобнее производить по ЛЧХ разомкнутой САУ. Очевидно, что каждой точке АФЧХ будут соответствовать определенные точки ЛАЧХ и ЛФЧХ. Пусть известны частотные характеристики двух разомкнутых САУ (1 и 2), отличающихся друг от друга только коэффициентом передачи K1 < K2. Пусть первая САУ устойчива в замкнутом состоянии, вторая нет.(рис.79).
Если W1(p) - передаточная функция первой САУ, то передаточная функция второй САУ W2(p) = K Поэтому ЛАЧХ второй САУ: L2( а ЛФЧХ: Пересечениям АФЧХ вещественной оси соответствует значение фазы Сравнивая АФЧХ и ЛФЧХ можно заключить, что система в замкнутом состоянии будет устойчива, если значению ЛФЧХ Особыми точками являются точки пересечения АФЧХ с единичной окружностью. Частоты В точках пересечения A( Исходя из сказанного, критерий устойчивости Наквиста по логарифмическим ЧХ, в случаях, когда АФЧХ только один раз пересекает отрезок вещественной оси [-
Если АФЧХ разомкнутой САУ имеет сложный вид (рис.80), то ЛФЧХ может несколько раз пересекать линию
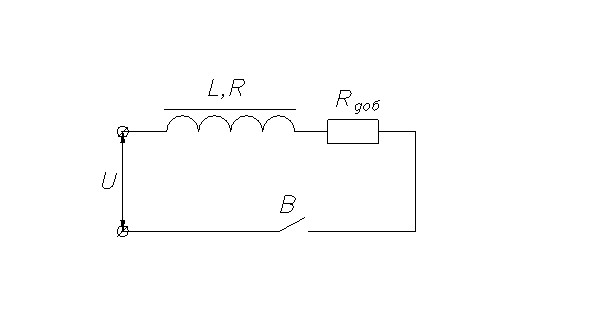
39. По временным параметрам (время срабатывания tСР и время отпускания tОТП) реле можно разделить на безынерционные (tСР ≤ 0,001 с; tОТП ≤ 0,001 с), быстродействующие (tСР ≤ 0,05 с; tОТП ≤ 0,05 с), замедленные (tСР ≥ 0,15с; tОТП ≥ ≥ 0,15 с) и нормальные (0,05 с ≤ tСР ≤ 0,15 с). Обычно tСР и tОТП не равны между собой, и поэтому одно и тоже реле может быть, например, быстродействующим при срабатывании и замедленным при отпускании, и наоборот. Как известно, при включении и выключении реле в цепи обмотки происходит переходной процесс. Время отпускания tОТП, как и время срабатывания реле, состоит из двух составляющих – времени трогания при отпускании и времени движения: Рассмотрим переходной процесс при включении реле. Электромагнитное реле можно представить себе как катушку с магнитопроводом и изобразить в виде последовательного соединения индуктивности L и активного сопротивления R обмотки (рис. 1).
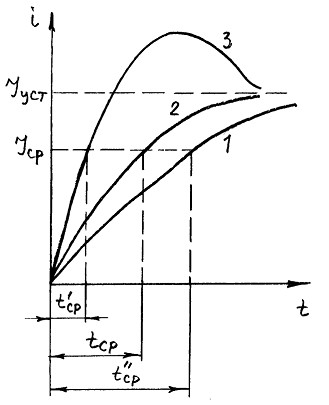
При ступенчатом изменении входного сигнала от 0 до IУСТ ток срабатывания IСР = IУСТ (1-е-t/τ) (1) где IУСТ = U/R – установившееся значение тока в обмотке; τ = L/R – электромагнитная постоянная времени обмотки при начальном положении якоря (при отпущенном якоре). Уравнение представляет собой экспоненту, которая графически изображается штриховой кривой 1 (рис. 1б) и выводится в предположении, что индуктивность обмотки реле и процесс срабатывания есть величина постоянная. Однако в действительности в процессе движения якоря изменяется магнитная проводимость воздушного зазора, следовательно, индуктивность обмотки также изменяется и не является постоянной. Изменение тока в реальных условиях показано на рисунке 1б сплошной кривой 2. Начиная от точки А (начало движения якоря), ток I изменяется не по экспоненте, а по какому-то другому закону, т.к. индуктивность обмотки начинает возрастать. Некоторое уменьшение тока после начала движения объясняется ростом противо-э.д.с., вызванным изменением индуктивности обмотки. После окончания движения якоря ток продолжает увеличиваться до своего установившегося значения IУСТ вновь по экспоненте, но с другой (большей) постоянной времени. При достижении током некоторого значения
Рис.1. Переходные процессы при включении и выключении реле Обычно время движения якоря значительно меньше, чем время трогания
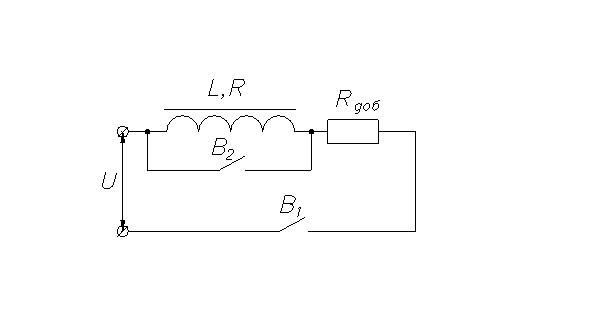
где kЗ.СР = iУСТ/iСР – коэффициент запаса при срабатывании. Переходный процесс при отключении реле рассмотрим также с момента трогания. Отпускание якоря реле может быть вызвано либо отключением напряжения питания U от обмотки с помощью выключателя В1, либо замыканием этой обмотки накоротко выключателем В2 (рис. 1в). Для того, чтобы избежать короткого замыкания источника питания U (второй случай), в схеме предусматривается резистор RДОБ. В первом случае при отключении напряжения питания U (рис. 1в) ток в обмотке практически мгновенно уменьшается от iУСТ до нуля (рис. 1г – штриховая линия). Однако, следует указать, что при размыкании выключателя В1 энергия, запасённая в магнитном поле обмотки, создаёт переходной процесс небольшой длительности, поддерживая некоторое время ток за счёт дугового разряда между контактами реле. При этом вся энергия, запасённая в магнитном поле, переходит в тепло. Учитывая, что длительность этого процесса мала, можно полагать, что время трогания при отпускании приблизительно равно нулю ( При отпускании реле путём замыкания обмотки накоротко (рис. 1г) ток переходного процесса:
Графически эта зависимость представлена экспонентой 1 (рис. 1г). Якорь реле начнёт отходить от сердечника в момент, когда тяговое усилие будет меньше, чем противодействующее. Ток, при котором начинается отход якоря от сердечника, соответствует току трогания iТР. Если в (4) вместо тока iОТ подставим его значение iОТ = iТР, то получим выражение для определения времени трогания при отпускании:
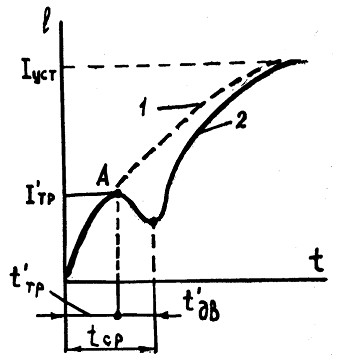
где τ2 = L/R – электромагнитная постоянная времени; L – индуктивность обмотки при притянутом якоре. На рис. 1г кривая 2 показывает изменение тока в обмотке реле с момента начала движения якоря (точка А) до окончания переходного процесса. Здесь, как и при срабатывании, наблюдается некоторое отклонение кривой 2 (всплеск) от экспоненты 1 вследствие изменения индуктивности обмотки от максимального до минимального значения. После того, как якорь отойдёт от сердечника, ток будет продолжать уменьшаться по экспоненте с прежней постоянной (как и при начальном положении якоря), т.е. τ1 = L/R. Время движения при отпускании Время срабатывания и отпускания реле можно изменить как схемными, так и конструктивными методами. Применяя схемные методы, можно изменять длительность переходного процесса. Учитывая, что для реле данного типа величина iСР = const, из формулы (3) следует, что изменять величину tСР можно, изменяя iУСТ или τ1. Так, например, увеличение установившегося значения iУСТ приводит к уменьшению tСР, а увеличение постоянной времени τ1 – к увеличению tСР. Однако, практические возможности здесь ограничены, а именно: при увеличении iУСТ может произойти перегрев обмотки, а уменьшение iУСТ приводит к уменьшению коэффициента запаса при срабатывании kЗ.СР = iУСТ/iСР. Рассмотрим схемные методы ускорения срабатывания реле (рис. 2). На рис. 2б кривая 1 характеризует переходной процесс в обмотке реле без принудительного ускорения срабатывания реле, при этом время срабатывания реле обозначено, как
где LОБ и RОБ – соответственно индуктивность и активное сопротивление обмотки реле; RДОБ – добавочное сопротивление резистора, включенного с обмоткой. Ещё большее быстродействие (в 5...10 раз) можно получить, включив параллельно RДОБ ёмкость С (рис. 2а, штриховая линия). При замыкании выключателя В ток переходного процесса iПЕР проходит через С в обход RДОБ, т.к. ёмкостное сопротивление конденсатора С значительно меньше RДОБ. Зарядный ток конденсатора резко увеличивается до значительной величины, поэтому ток в обмотке реле быстрее достигает значения тока срабатывания и, следовательно,
Рис. 2. Схема ускорения срабатывания реле (а) и зависимость изменения тока в катушке реле при срабатывании реле (б).
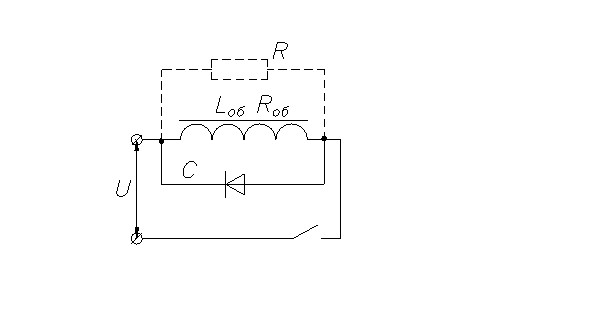
В рассмотренных методах ускорения срабатывания реле для сохранения величины установившегося тока iУСТ необходимо увеличить напряжение питания U на величину ΔU. Следует указать, что для уменьшения tСР и tОТП магнитопровод выполняют из материалов, обладающих большим удельным сопротивлением и уменьшающих вихревые токи – при этом время трогания увеличивается. К таким материалам относятся кремниевые стали, низконикелевые пермаллоевые стали и т. п. В схеме, приведённой на рис. 3а, замедление срабатывания реле осуществляется с помощью конденсатора С, включенного параллельно обмотке. При включении обмотки ток переходного процесса iПЕР в начале проходит через С в обход LОБ, т.к. индуктивное сопротивление обмотки значительно больше ёмкостного сопротивления конденсатора. В конце переходного процесса, когда скорость изменения тока невелика, ток проходит через обмотку реле, вызывая замедление срабатывания, пропорциональное величине ёмкости конденсатора С. Время протекания тока через конденсатор и, следовательно, величина замедления определяется соотношением величин U, C, LОБ, RОБ. Из-за возможности образования резонансных явлений данная схема не нашла широкого применения.
Рис. 3. Схемы замедления срабатывания и отпускания реле при параллельном включении конденсатора (а), короткозамкнутой обмотки (б), диода и резистора (в).
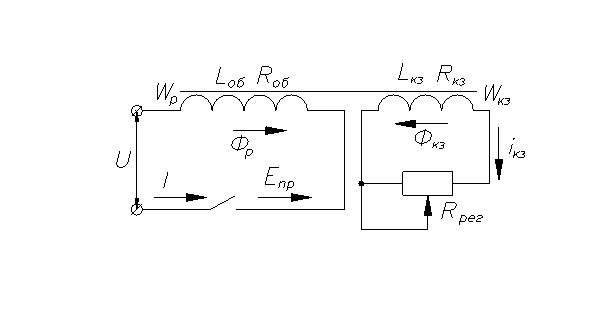
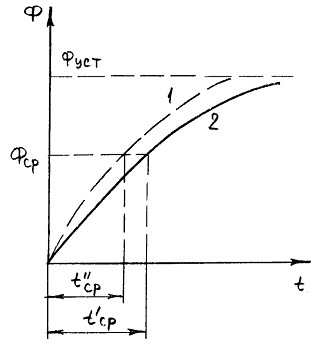
Весьма эффективным способом получения замедления срабатывания реле является электромагнитное демпфирование (способ воздействия на скорость изменения магнитного потока в магнитопроводе называют демпфированием). Сущность магнитного демпфирования состоит в том, что на сердечнике размещают кроме рабочей обмотки W (см. рис. 3б) ещё и короткозамкнутую обмотку WКЗ (называемую демпфирующей), которая обладает большой индуктивностью LКЗ и малым активным сопротивлением RКЗ. В демпфирующей обмотке при включении выключателя в переходном режиме создаётся ток iКЗ, образующий магнитный поток ФКЗ, который наводит в рабочей обмотке WР противо-э.д.с. – Е. По закону Ленца эта э.д.с. препятствует нарастанию тока i и магнитного потока ФР в рабочей обмотке и, следовательно, замедляет срабатывание реле. По окончании переходного процесса магнитный поток ФР в рабочей обмотке становится постоянным, и действие обмотки WКЗ прекращается. Время нарастания магнитного потока до величины ФСР и время срабатывания реле до величины
Рис. 4. Изменение величины магнитного потока у реле с короткозамкнутой обмоткой (1) и без нее (2).
Время замедления можно регулировать при помощи регулировочного резистора RРЕГ (см. рис. 3б), включенного в цепь обмотки WКЗ. При замыкании этой обмотки накоротко время замедления имеет максимальное значение. Короткозамкнутая катушка обычно выполняется в виде массивной втулки (гильзы) из меди или алюминия, надетой на сердечник. Наличие втулок способствует увеличению вихревых токов, а, следовательно, их магнитных потоков (см. рис. 5). Увеличение времени отпускания реле можно получить шунтированием катушки реле резистором R и диодом VD (рис. 3в). Лабораторный макет состоит из измерителя временных параметров реле Ф291, лабораторного стенда с испытываемыми реле (МКУ - 48С, РКМП - 2) и блока питания Б5 - 50 (рис. 6а, б, в, г). Прибор Ф291 позволяет измерять по первому замыканию (размыканию) контакта проверяемого реле следующие временные параметры: а) время отпускания реле; б) разность времени срабатывания (отпускания) любой комбинации двух пар контактов;
Рис. 5. Магнитное демпфирование реле с помощью короткозамкнутых катушек: 1 – короткозамкнутая катушка, 2 – сердечник, 3 – обмотка.
в) время срабатывания реле с размыкающими и замыкающими контактами; г) время кратковременного замыкания и размыкания контакта; На лицевой панели прибора Ф291 расположены: а) кнопка включения прибора; б) переключатель "РЕЖИМ" для выполнения коммутаций схемы прибора, соответствующих соотношению контактов и режиму работы проверяемого реле; в) кнопка "КНТ" (контакт) для измерения функций проверяемых контактов; г) кнопка "РАЗН" (разность) для работы в режимах определения разности времени срабатывания любой комбинации двух замыкающих и размыкающих контактов и определения времени кратковременного замыкания или размыкания контакта; д) кнопка "100" для работы прибора на пределе 100000 ms; е) кнопка "СУМ" (сумма) для суммирования показаний прибора при неоднократном измерении параметров реле;
ж) кнопка "СБР" (сброс) для сброса показаний отсчётного устройства прибора; з) тумблер "ПУСК" для подключения напряжения к обмотке проверяемого реле и подключения генератора импульсов к счётным декадам. На задней панели прибора Ф291 расположены: а) клеммы 1, 2 (цепь реле) для подключения обмотки реле к цепи питания; б) клеммы 3, 4 (контакт 1), 3, 6 (контакт 2) для подключения контактов проверяемого реле в) разъём "ЦПУ" для вывода результатов на печатающее устройство; г) разъём "ДУ" для подключения дистанционного управления; е) клемма заземления. В лабораторной работе используются следующие режимы работы прибора Ф291:
Лабораторный макет представляет собой испытательный стенд с расположенными на нём реле типа МКУ - 48С и РКМП - 2 и выведенными клеммами питания, контактными группами реле и клеммами конденсатора и резистора. Имеется возможность менять номинал резистора (100 Ом /220 Ом) при помощи тумблера на лицевой панели. Напряжение питания реле МКУ-48С – 24 В, РКМП - 2 – 42 В. Блок питания Б5 - 50 представляет собой импульсный источник постоянного тока с возможностью дискретной установки фиксированных значений напряжения и тока. Шаг дискретного значения напряжения и тока 1 В, 1 мА. Пределы установки выходного напряжения 0 - 299 В; пределы установки выходного тока 0 - 299 мА. ЗАПРЕЩАЕТСЯ ВКЛЮЧАТЬ ИСТОЧНИК Б5-50 ПРИ ПОЛОЖЕНИИ ДИСКРЕТНЫХ НАБОРНЫХ ПЕРЕКЛЮЧАТЕЛЕЙ, РАВНЫХ ПОКАЗАНИЯМ "000" В, "000" мА.
40. К системам автоматического регулирования (САР) предъявляются требования не только Если исследуемая САР является устойчивой, возникает вопрос о том, насколько качественно происходит регулирование в этой системе и удовлетворяет ли оно технологическим требованиям обьекта управления. На практике качество регулирования определяется визуально по графику переходной характеристики. Однако, имеются точные но более сложные математические методы, дающие конкретные числовые значения (которые не рассматриваются в данной методике). Классификация показателей качества состоит из нескольких групп:
Прямыми показателями качества процесса управления, определяемые непосредственно по 1. Установившееся значение выходной величины Yуст, 2. Степень затухания?, 3. Время достижения первого максимума tmax, 4. Время регулирования tp, 5. Ошибка регулирования Ест (статистическая или среднеквадратическая составляющие), 6. Перерегулирование у, 7. Динамический коэффициент регулирования Rd, 8. Показатель колебательности М. Например, переходная характеристика, снятая на объекте управления при отработке ступенчатого воздействия, имеет колебательный вид и представлена на рис.1. Рисунок 1 - Определение показателей качества по переходной характеристике
  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 . При увеличении коэффициента усиления САУ K каждая точка ее АФЧХ удаляется от начала координат, пока при некотором значении Kкрит АФЧХ не пересечет точку (-1, j0). При дальнейшем увеличении K, САУ будет неустойчива. И наоборот, при уменьшении K такую САУ в принципе возможно сделать устойчивой, поэтому ее называют структурно устойчивой.
. При увеличении коэффициента усиления САУ K каждая точка ее АФЧХ удаляется от начала координат, пока при некотором значении Kкрит АФЧХ не пересечет точку (-1, j0). При дальнейшем увеличении K, САУ будет неустойчива. И наоборот, при уменьшении K такую САУ в принципе возможно сделать устойчивой, поэтому ее называют структурно устойчивой. D1p(p) = 0, где n - порядок астатизма, равный количеству последовательно включенных интеграторов. Это уравнение имеет нулевые корни, поэтому при
D1p(p) = 0, где n - порядок астатизма, равный количеству последовательно включенных интеграторов. Это уравнение имеет нулевые корни, поэтому при 
 0, АФЧХ стремится к
0, АФЧХ стремится к  (рис.71в и 71г). Например, пусть Wр(p) =
(рис.71в и 71г). Например, пусть Wр(p) =  , здесь
, здесь  = P(
= P(
 Например, пусть Wр(p) =
Например, пусть Wр(p) =  , тогда АФЧХ САУ:
, тогда АФЧХ САУ: = P(
= P(

 между отрицательным направлением вещественной полуоси и лучом, проведенным из начала координат в точку пересечения годографа с единичной окружностью.
между отрицательным направлением вещественной полуоси и лучом, проведенным из начала координат в точку пересечения годографа с единичной окружностью. Как уже отмечалось, с ростом коэффициента передачи разомкнутой САУ растет модуль каждой точки АФЧХ и при некотором значении K = Kкр АФЧХ пройдет через критическую точку (рис.76) и попадет на границу устойчивости, а при K > Kкр замкнутая САУ станет неустойчива. Однако в случае “клювообразных” АФЧХ (получаются из-за наличия внутренних обратных связей) не только увеличение, но и уменьшение K может привести к потере устойчивости замкнутых САУ (рис.77). В этом случае запас устойчивости определяется двумя отрезками h1 и h2, заключенными между критической точкой и АФЧХ.
Как уже отмечалось, с ростом коэффициента передачи разомкнутой САУ растет модуль каждой точки АФЧХ и при некотором значении K = Kкр АФЧХ пройдет через критическую точку (рис.76) и попадет на границу устойчивости, а при K > Kкр замкнутая САУ станет неустойчива. Однако в случае “клювообразных” АФЧХ (получаются из-за наличия внутренних обратных связей) не только увеличение, но и уменьшение K может привести к потере устойчивости замкнутых САУ (рис.77). В этом случае запас устойчивости определяется двумя отрезками h1 и h2, заключенными между критической точкой и АФЧХ.
 W1(p), где K = K2/K1. Вторую САУ можно представить последовательной цепочкой из двух звеньев с передаточными функциями K (безынерционное звено) и W1(p), поэтому результирующие ЛЧХ строятся как сумма ЛЧХ каждого из звеньев.
W1(p), где K = K2/K1. Вторую САУ можно представить последовательной цепочкой из двух звеньев с передаточными функциями K (безынерционное звено) и W1(p), поэтому результирующие ЛЧХ строятся как сумма ЛЧХ каждого из звеньев. . Это соответствует точке пересечения ЛФЧХ
. Это соответствует точке пересечения ЛФЧХ 
 ,
,  .
. начинается движение якоря: время, прошедшее от момента включения, соответствует времени трогания:
начинается движение якоря: время, прошедшее от момента включения, соответствует времени трогания: (2)
(2) а)
а)
 б)
б)
 в)
в)
 г)
г)
 и может быть принято постоянным для реле данного типа (
и может быть принято постоянным для реле данного типа ( = (0,1...0,4)
= (0,1...0,4)  (3)
(3) см. рис. 1г).
см. рис. 1г). (4)
(4) (5)
(5) определяется так же, как при срабатывании реле. Вычислить момент срабатывания реле по формуле (3) затруднительно, т.к. невозможно точно определить индуктивность обмотки L; кроме того, при вычислении tСР не учитываются погрешности, которые возникают из-за влияния вихревых токов. Более точные результаты определения tСР дают экспериментальные методы.
определяется так же, как при срабатывании реле. Вычислить момент срабатывания реле по формуле (3) затруднительно, т.к. невозможно точно определить индуктивность обмотки L; кроме того, при вычислении tСР не учитываются погрешности, которые возникают из-за влияния вихревых токов. Более точные результаты определения tСР дают экспериментальные методы. . Включение последовательно с обмоткой реле добавочного активного сопротивления RДОБ (см. рис. 2а) приводит к уменьшению постоянной времени цепи, т.е. к уменьшению времени срабатывания реле tСР (кривая 2, рис. 2б). В этом случае постоянная времени цепи будет
. Включение последовательно с обмоткой реле добавочного активного сопротивления RДОБ (см. рис. 2а) приводит к уменьшению постоянной времени цепи, т.е. к уменьшению времени срабатывания реле tСР (кривая 2, рис. 2б). В этом случае постоянная времени цепи будет становится меньше (кривая 3, рис. 2б). За малый промежуток времени существования ток переходного процесса не успевает перегреть обмотку реле. В установившемся режиме ток iУСТ проходит через резистор RДОБ (т.к. конденсатор не пропускает постоянный ток), и поэтому величина его будет значительно меньше по сравнению с броском тока. Следовательно, перегрева обмотки в этом случае не будет.
становится меньше (кривая 3, рис. 2б). За малый промежуток времени существования ток переходного процесса не успевает перегреть обмотку реле. В установившемся режиме ток iУСТ проходит через резистор RДОБ (т.к. конденсатор не пропускает постоянный ток), и поэтому величина его будет значительно меньше по сравнению с броском тока. Следовательно, перегрева обмотки в этом случае не будет.