|
|
Универсальные устройства управления.Стр 1 из 3Следующая ⇒ · Указать основные функции устройств управления. · Описать структуру универсального устройства управления по предложенной схеме. · Указать назначение блоков, входящих в схему.
Ответ
К основным функциям устройств управления относятся определение последовательности выборки команд из памяти, расшифровка команд и их реализация, выполнение операций управления. Независимо от типа и вида универсальные устройства управления в общем случае имеют одинаковую структуру и состоят из блоков управления командами БУК (для преобразования команд), микрокоманд БМК (для выработки управляющих сигналов), прерываний БП (для реакций ЭВМ на внешние воздействия), пульта управления ПУ (для ручного управления). Блок управления командами предназначен для реализации всех операций, связанных с выполнением первых трех основных функций УУ: выборки очередной команды; хранения команды в течение цикла; преобразования адресной части команды. Блок микрокоманд предназначен для преобразования операционной части команды и формирования необходимых наборов управляющих сигналов для выполнения заданных операций. Код операции, как исходная информация, поступает в БМК из блока управления командами БУК в начале цикла. Для преобразования кодов в управляющие сигналы в БМК используются дешифраторы и шифраторы (сборки). При этом в БМК существуют дешифраторы кодов операции и дешифраторы признаков. Схемы дешифраторов в БМК будут функционировать только в том случае, если с кодом операции в БМК поступает код признака модификации выполняемой операции. В некоторых случаях в БМК передаются также коды других признаков. Для синхронизации работы устройства управления в блок микрокоманд БМК поступают синхросигналы управления (ССУ). Таким образом, БМК может быть представлен как совокупность узлов, обеспечивающих дешифрирование кодов операций и признаков и временное распределение микрокоманд и шифрацию (объединение) микрокоманд по типам. Такие узлы представляют собой логические схемы, дополненные запоминающими элементами, построенными на триггерах», Для временного распределения сформированных управляющих сигналов с целью их тактирования используются генераторы тактовых или синхронизируемых импульсов. Устройства управления с БМК, построенные по этому принципу, относятся к УУ со схемным формированием наборов управляющих сигналов.
Индуктивные датчики. · Указать назначение индуктивных датчиков. · Изобразить схему индуктивного датчика с подвижным якорем. · Описать принцип работы. · Описать принцип работы индуктивного датчика с подвижным сердечником по предложенной схеме. · Описать принцип работы.
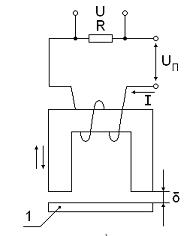
Ответ Принцип действия основан на изменении индуктивности катушки с подвижным якорем вследствие изменения магнитной проницаемости. Индуктивные датчики можно использовать как датчики пути, положения или размерные.
На рисунке изображен индуктивный датчик с подвижным якорем. Если перемещать якорь 1 датчика, воздушный зазор δ будет изменяться, что вызовет изменение индуктивности обмотки. Сила тока в цепи обмотки датчика I=U/Z=UП/√R2+XL2, Где Z – полное сопротивление цепи, UП – напряжение питания датчика; R – активное сопротивление цепи; XL = 2π f L– индуктивное сопротивление обмотки. Если UП, R, f постоянны, то сила тока I в катушке, а следовательно, и напряжение U будут пропорциональны воздушному зазору δ. Датчики работают при частоте питающей сети 50 – 5000Гц. Индуктивный дифференциальный размерный датчик (рисунок б) состоит из двух катушек 2, 4, на которых расположены обмотки, подключаемые по дифференциальной схеме или в плечи измерительного моста. В катушках расположен сердечник 3, соединенный с измерительным штоком 1, который контактирует с измеряемой поверхностью. При среднем положении сердечника, т.е. при δ1 = δ2 ,параметры катушек одинаковы, тогда I1 = I2. Так как обмотки соединены по дифференциальной схеме, сигнал на выходе датчика равен нулю. При изменении положения сердечника, когда δ1 ≠ δ2, происходит изменение индуктивности обмотки, тогда I1 = I2, I1 > I2, I1 < I2. Сигнал будет пропорционален перемещению сердечника, а его знак будет определять направление перемещения. В индуктивных дифференциальных датчиках трансформаторного типа при изменении положения сердечника (плунжера) меняется взаимоиндукция между первичной и вторичной обмотками, что вызывает во вторичных обмотках изменение индуцируемой ЭДС.
  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|