
|
|
САУ по отклонению, возмущению и комбинированные системы.
По принципу управления САУ можно разбить на три группы: · С регулированием по внешнему воздействию – принцип Понселе (применяется в незамкнутых САУ). · С регулированием по отклонению – принцип Ползунова-Уатта (применяется в замкнутых САУ). · С комбинированным регулированием. В этом случае САУ содержит замкнутый и разомкнутый контуры регулирования. Принцип управления по внешнему возмущению
Достоинства: · Можно добиться полной инвариантности к определенным возмущениям. · Не возникает проблема устойчивости системы, т.к. нет ОС. Недостатки: · Большое количество возмущений требует соответствующего количества компенсационных каналов. · Изменения параметров регулируемого объекта приводят к появлению ошибок в управлении. · Можно применять только к тем объектам, чьи характеристики четко известны. Принцип управления по отклонению
Достоинства: · ООС приводит к уменьшению ошибки не зависимо от факторов ее вызвавших (изменений параметров регулируемого объекта или внешних условий). Недостатки: · В системах с ОС возникает проблема устойчивости. · В системах принципиально невозможно добиться абсолютной инвариантности к возмущениям. Стремление добиться частичной инвариантности (не 1-ыми ОС) приводит к усложнению системы и ухудшению устойчивости. Комбинированное управление
Достоинства: · Наличие ООС делает систему менее чувствительной к изменению параметров регулируемого объекта. · Добавление канала(ов), чувствительного к заданию или к возмущению, не влияет на устойчивость контура ОС. Недостатки: · Каналы, чувствительные к заданию или к возмущению, обычно содержат дифференцирующие звенья. Их практическая реализация затруднена. · Не все объекты допускают форсирование.
Линеаризация характеристик Поведение АСР в процессе функционирования представляет собой сочетание статических и динамических режимов. Для синтеза АСР и еѐ отдельных элементов, а также исследования их характеристик необходимо иметь уравнения, связывающие входные и выходные параметры.Различают статическую и динамичекую модели (характеристики).
Статическая модель описывает поведение системы в равновесном состоянии:
где у – выходная величина, х – входная ве- личина.
x0 xВ общем случае функция (*) нелинейна, поэтому ее линеаризуют, раcкладывая в ряд Тейлора в окрестностях рабочей точки:
Оставляя только линейные члены ряда можно записать: где Если выходная величина объекта зависит от нескольких входных воз- действий, то при линеаризации по методу малых приращений следует опреде- лять частные производные по всем воздействиям, а приращение выходной ве- личины является суммой частных приращений входных воздействий, т.е:
Динамические характеристики Динамическая модель описывает изменение входных и выходных вели- чин во времени. Если объект имеет один выход, то динамическая модель в общем случае имеет вид:
где y(t), x(t) – выходная и входная величины; ai и bi, – постоянные коэф- фициенты; n – порядок уравнения, при этом n≥m – условие физической реализуемости элемента. Если входных величин несколько – то они и их производные записыва- ются в правой части уравнения. Если объект имеет k выходов, то его динамика описывается системой k дифуравнений. Динамические характеристики рассматривают при трех стандартных входных воздействиях: · единичном ступенчатом – 1(t), · единичном импульсном – δ(t), · периодическом (синусоидальном). В первых двух случаях полученные характеристики называются времен- ными, в третьем – частотными. По временным характеристикам определяют качество регулирования   Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 В структуре обязательны датчики возмущения. Система описывается передаточной функцией разомкнутой системы.
В структуре обязательны датчики возмущения. Система описывается передаточной функцией разомкнутой системы. Система описывается передаточной функцией разомкнутой системы и уравнением замыкания: x (t)= g (t)− y (t) W ос(p). Алгоритм работы системы заключен в стремлении свести ошибку x (t) к нулю.
Система описывается передаточной функцией разомкнутой системы и уравнением замыкания: x (t)= g (t)− y (t) W ос(p). Алгоритм работы системы заключен в стремлении свести ошибку x (t) к нулю. Комбинированное управление заключено в сочетании двух принципов управления по отклонению и внешнему возмущению. Т.е. сигнал управления на объект формируется двумя каналами. Первый канал чувствителен к отклонению регулируемой величины от задания. Второй формирует управляющее воздействие непосредственно из задающего или возмущающего сигнала.
Комбинированное управление заключено в сочетании двух принципов управления по отклонению и внешнему возмущению. Т.е. сигнал управления на объект формируется двумя каналами. Первый канал чувствителен к отклонению регулируемой величины от задания. Второй формирует управляющее воздействие непосредственно из задающего или возмущающего сигнала.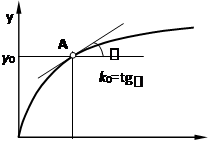 Статические характеристики АСР.
Статические характеристики АСР. , (*)
, (*)
 ,
, -коэффициент передачи объекта.
-коэффициент передачи объекта. , где Δx1, Δx2, …, Δxn – приращения входных воздействий.
, где Δx1, Δx2, …, Δxn – приращения входных воздействий. ,
,