|
|
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ. ОБЩИЕ СВЕДЕНИЯСтр 1 из 11Следующая ⇒ УДК 621.81(075) ББК 34.42я73
ISBN 978-5-8149-1038-7 © ГОУ ВПО «Омский государственный технический университет», 2010
Дисциплина «Детали машин и основы конструирования» является базовой при подготовке конструкторов широкого профиля – создателей новой техники, способствуя формированию умений и навыков, необходимых в инженерной деятельности. Цель настоящего пособия – изложить в лаконичной форме учебный материал, касающийся основ теории, расчета и принципов конструирования передач зацеплением и трением машин общего назначения. При этом подробно рассмотрены операции по выбору материалов передач и допускаемых напряжений, определению геометрических параметров передач, сил в зацеплении. Пособие написано в соответствии с принятой классификациией деталей машин. Приведенные термины, обозначения и расчёты передач машин соответствуют действующим стандартам.
Основные понятия «Детали машин» – научная дисциплина по теории, расчету и конструированию деталей и сборочных единиц общемашиностроительного применения. В её задачи входит обобщение инженерного опыта создания машиностроительных конструкций, разработка научных основ расчета и проектирования надежных элементов и сборочных единиц конструкций. «Детали машин» стали рассматривать как самостоятельную научную дисциплину во второй половине позапрошлого века. Первый в России курс «Детали машин» был создан в 1881 г. В.Л. Кирпичевым (1845–1913). Большой вклад в развитие науки в дальнейшем внесли П.К. Худяков (1857–1936), А.И. Сидоров (1866–1931), М.А. Саверин (1891–1952), Д.Н. Решетов и др. Конструирование – логико-математический творческий процесс поиска оптимального варианта структуры, форм, размеров, материалов и взаимосвязи совокупности отдельных элементов, предназначенных для выполнения заданных функций в соответствии с требованиями технического задания, с учетом достижений науки и техники, патентных оценок и перспектив развития отрасли.
Основные правила конструирования 1. Ориентирование на нормальные условия эксплуатации. 2. Поиск оптимального конструктивного решения. 3. Выполнение условия равнопрочности. Механизм – система сопряженных тел, предназначенных для преобразования движения одного или нескольких тел в требуемое движение других твердых тел. Машина – устройство, выполняющее движения для преобразования энергии, материалов или информации с целью облегчения физического или умственного труда человека и повышения его производительности. По характеру рабочего процесса машины делятся на энергетические, технологические, транспортные, транспортирующие и информационные. Энергетические машины преобразуют энергию любого вида (электрическую, паровую, тепловую) в механическую (электрические машины (электродвигатели), электромагнитные преобразователи тока, паровые машины, двигатели внутреннего сгорания (ДВС), турбины) или механическую энергию в энергию любого вида (генераторы, компрессоры, воздуходувки, гидравлические насосы). Технологические машины предназначены для преобразования обрабатываемого предмета (продукта), состоящего в изменении его размеров, формы, свойств или состояния (станки, сельскохозяйственные и строительные машины, аппараты и роботы). Транспортные машины преобразуют энергию двигателя в энергию перемещения пассажиров и грузов на значительные расстояния (самолеты, локомотивы, теплоходы, автомобили, велосипеды и т. д.). Транспортирующие машины преобразуют энергию двигателя в энергию перемещения пассажиров и грузов на незначительные расстояния (эскалаторы, конвейеры, элеваторы, подъемные краны, водоподъемные устройства и т. д.). Информационные машины предназначены для получения, преобразования и хранения информации (электронно-вычислительные машины, шифровальные машины). Механические движения в них служат для выполнения вспомогательных операций, и поэтому в общепринятом понимании к машинам они отнесены условно. Машины состоят из деталей, механизмов, сборочных единиц, агрегатов, соединенных при помощи специальных элементов в изделие. Изделием называют любой предмет или набор предметов производства, подлежащих изготовлению на предприятиях. ГОСТ 2.101-68 устанавливает следующие виды изделий: детали, сборочные единицы, комплексы, комплекты (в курсовом проекте задействованы только детали и сборочные единицы). Деталь – изделие, изготовленное из однородного по наименованию и марке материала без применения сборочных операций. В качестве конструкционных материалов, используемых в машиностроении для изготовления деталей машин, используют различные металлы (алюминий, железо, медь, титан), сплавы металлов (железоуглеродистые – чугун, сталь; магниевые; медноцинковые – латуни; меднооловянные – бронзы; сплавы алюминия и др.), неметаллы (пластмассы, древесину, текстолиты) и композиционные материалы. Сборочная единица – изделие, составные части которого подлежат соединению между собой на предприятии-изготовителе сборочными операциями (сваркой, свинчиванием, клепкой и др.). Комплекс – два и более специфицированных изделия, не соединенных на предприятии-изготовителе сборочными операциями, но предназначенных для выполнения взаимосвязанных эксплуатационных функций (поточная линия станка или автоматическая телефонная станция, например). Комплект – два и более изделия, не соединенных на предприятии-изготовителе сборочными операциями и представляющих набор изделий, имеющих общее эксплуатационное назначение вспомогательного характера (комплект запасных частей, комплект инструмента). Агрегат – укрупненный унифицированный элемент, обладающий полной взаимозаменяемостью и выполняющий определенные функции в технологическом процессе (например, в автомобиле это двигатель, коробка передач). Основные показатели машин – надежность, производительность, экономическая эффективность, металлоемкость, энергоемкость, степень автоматизации, простота и безопасность обслуживания, удобство сборки и разборки. Надежность – способность изделия сохранять во времени способность к выполнению требуемых функций в заданных режимах и условиях применения, технического обслуживания, хранения и транспортирования. Надежность характеризуется состояниями и событиями. Работоспособность – состояние изделия, при котором оно способно нормально выполнять заданные функции. Отказ – событие, заключающееся в полной или частичной утрате работоспособности. Показатели качества изделия по надежности: безотказность, долговечность и ремонтопригодность. Временные понятия надежности: наработка, ресурс, срок службы. Основные критерии работоспособности машин – прочность, жесткость, износостойкость, теплостойкость, виброустойчивость. Прочность – способность детали, сборочной единицы или машины сопротивляться разрушению под влиянием внешних нагрузок. Различают понятия объемной и поверхностной (контактной) прочности. При недостаточной объемной прочности деталь разрушается по всему сечению (поломка зуба шестерни, вала, разрыв стержня болта), при недостаточной поверхностной прочности происходит разрушение поверхности контакта (выкрашивание поверхности зуба шестерни, рабочей поверхности колец подшипника качения). Оценка прочности обеспечивается проведением соответствующих расчетов по определению напряжений и сравнением их с допускаемыми (пределом прочности, текучести и выносливости). Жесткость – способность детали, сборочной единицы или машины сопротивляться изменению положения и формы под влиянием внешних нагрузок. Недостаточная жесткость приводит к неравномерному распределению нагрузок (по длине зубьев колес при изгибе и кручении валов) и к снижению долговечности отдельных узлов машины (подшипники качения при относительном перекосе их колец). Оценка жесткости обеспечивается проведением их расчетов по определению линейных и угловых деформаций при изгибе, угла закручивания при кручении, удлинения при растяжении и сравнения их с допускаемыми. Износостойкость – способность контактирующих деталей при их относительном перемещении сопротивляться изменению формы и размеров рабочих поверхностей вследствие их изнашивания в процессе трения. Износ требует периодической регулировки и ремонта машины, снижает точность и КПД, увеличивает шум и может служить причиной ее поломки. Теплостойкость – способность машины, ее деталей и узлов работать при заданных тепловых режимах в течение заданного срока службы, обеспечивая заданные режимы работы. Для обеспечения нормального теплового режима работы проводят тепловые расчеты (тепловыделение за единицу времени должно быть не больше теплоотдачи). Виброустойчивость – способность конструкции работать в диапазоне режимов, достаточно далеких от области резонанса. Расчеты на виброустойчивость сводятся к определению частот собственных колебаний конструкции в целом и обеспечению их несовпадения с частотой вынужденных колебаний.
Классификация передач В самом общем виде передачи можно классифицировать по способу передачи движения: передачи трением (фрикционные, ременные); передачи зацеплением (зубчатые, червячные, цепные, винт–гайка); по способу соединения звеньев: передачи с непосредственным контактом (фрикционные, зубчатые, червячные, винт–гайка); передачи гибкой связью (ременные, цепные) (рис. 1.1). Звено передачи, которое получает движение от машины-двигателя, называется ведущим; звено, которому передается движение, называется ведомым; кроме того, в передачах бывают промежуточные звенья. Индекс 1присваивается параметрам, относящимся к ведущему звену, а индекс 2 – к ведомому.
а б
Рис. 1.1. Передачи: а – гибкой связью; б – с непосредственным контактом
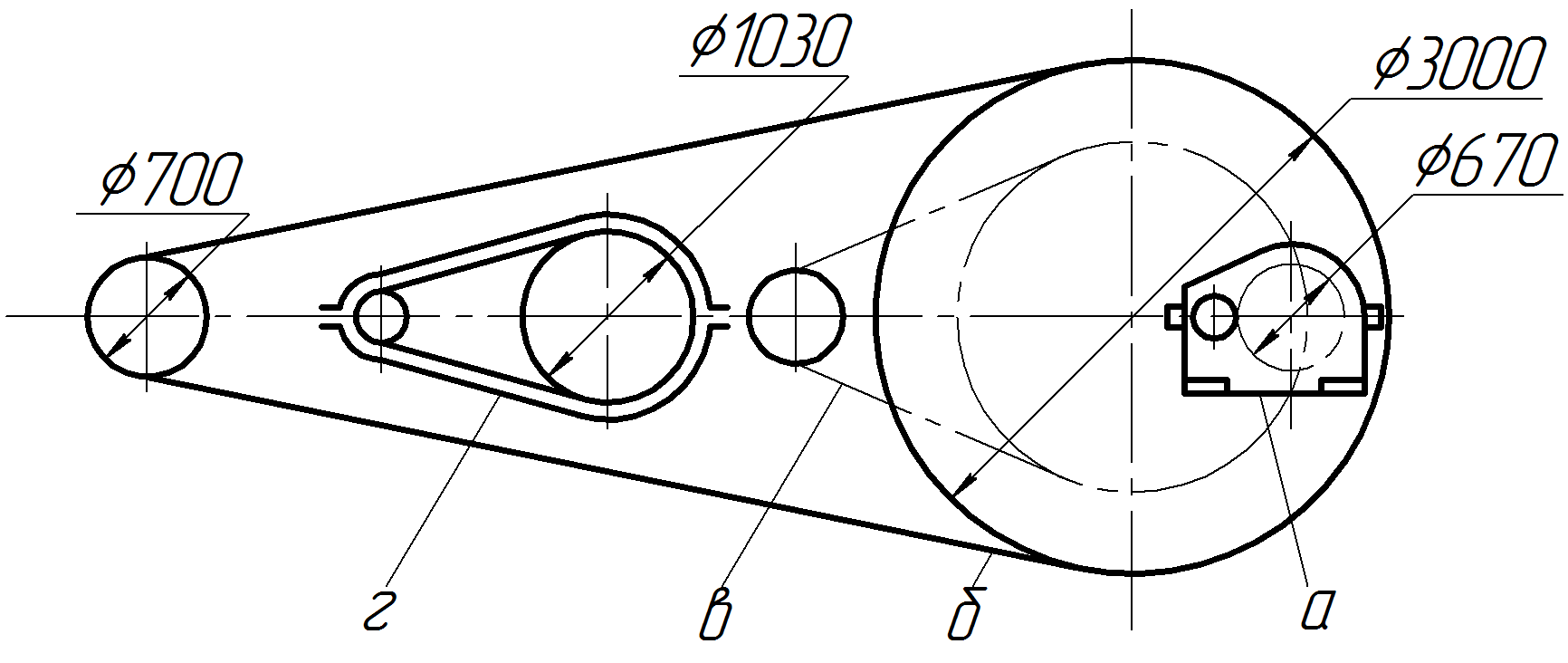
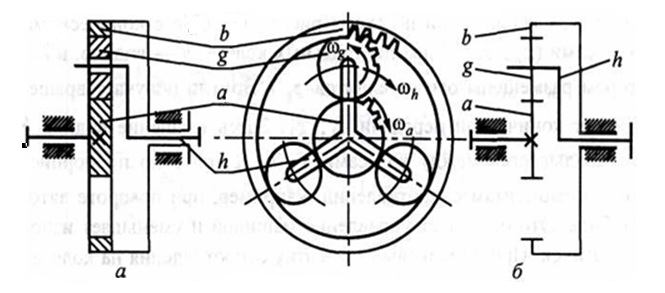
Рис. 1.2. Сравнительные размеры различных видов передач с одинаковыми параметрами: а – зубчатая; б – ременная; в – клиноременная; г – цепная ПЛАНЕТАРНЫЕ ПЕРЕДАЧИ 2.1. Общие сведения Планетарными называют передачи, имеющие зубчатые колеса с перемещающимися осями. Наиболее широко применяют простую одноряднуюпередачу(рис. 2.1), которая состоит из центрального вращающегося колеса а с неподвижной геометрической осью и наружными зубьями, неподвижного центрального колеса b (колесо соединено с корпусом)с внутренними зубьями, сателлитов g – колес с наружными зубьями, которые зацепляются одновременно с колесами а и b (число сателлитов nw в передаче может быть от 3 до 6, на рисунке nw = 3), и водила h, на котором расположены оси сателлитов. Водило соединено с тихоходным валом.
Рис. 2.1. Планетарные передачи: а – конструктивная схема, б – кинематическая схема
Передача работает следующим образом: при неподвижном колесе b вращение колеса а вызывает вращение сателлита g относительно собственной оси, а обкатывание сателлита по колесу b перемещает его ось и вращает водило h. Сателлит совершает вращение относительно водила и вместе с водилом вращается вокруг центральной оси. Движение сателлитов схоже с движением планет вокруг Солнца, поэтому передачи назвали планетарными. При неподвижном колесе b чащеведущим бывает центральное колесо а (тогда движение передаются oт колеса а к водилу h), но возможна передача движения и от водила h к колесу а. При неподвижном колесе b ведущим в планетарной передаче может быть (чаще всего) центральное колесо а (и тогда движение передается oт колеса а к водилу h) или водило (и тогда движение передается от водила h к колесу а). Основными звеньямипланетарной передачи являются звенья, воспринимающие внешние вращающие моменты. На рис. 2.1. основные звенья а, b, h – два центральных колеса (2К) и водило (h). Кратко такую передачу обозначают как «2К-h». Внешние моменты на звеньях обозначают: Та –момент на ведущем валу, Т b – момент на неподвижном колесе b (на корпусе), Th – на ведомом (тихоходном) валу. Следует иметь ввиду: · в планетарных передачах применяют не только цилиндрические, но и конические колеса с прямым или косым зубом; · для наиболее часто применяемых схем передач характерно наличие либо высокого КПД, либо большого передаточного отношения в одной передаче; · для получения больших передаточных отношений в силовых приводах применяют многоступенчатые планетарные передачи.
Достоинствами планетарных передач являются: · широкие кинематические возможности, позволяющие использовать их в силовых передачах и приборах в качестве редуктора с постоянным передаточным отношением (в передаче, изображенной на рис. 2.1. при заданной угловой скорости ведущего звена угловые скорости всех остальных звеньев принимают вполне конкретные значения, поэтому рассматриваемая передача имеет постоянное передаточное число); в качестве коробки скоростей, передаточное отношение в которой изменяют путем поочередного торможения различных звеньев; в качестве дифференциального механизма в автомобилях, тракторах, станках, приборах (см. ниже); часто применяют планетарную передачу, совмещенную с электродвигателем (мотор-редуктор, мотор-колесо); · компактность и малая масса (масса по сравнению с непланетарными зубчатыми может быть уменьшена в 2–4 раза), так как передаваемая мощность распределяется по нескольким потокам (равным числу сателлитов), что позволяет снизить нагрузку на зубья в каждом зацеплении в несколько раз; внутренне зацепление (колеса b и g) обладает повышенной нагрузочной способностью, т.к. у него больший приведенный радиус кривизны в зацеплении (см. знаки «±» в формуле определения приведенного радиуса кривизны); · большие передаточные отношения при малом числе колес (до тысячи и больше) без применения многоступенчатых передач (но нужно помнить, что с увеличением передаточного отношения в одной передаче КПД уменьшается); · малая нагрузка на опоры, т.к. при симметричном расположении сателлитов радиальные нагрузки на валы и их опоры уравновешиваются; · работа с меньшим шумом по сравнению с обычными зубчатыми передачами за счет повышенной плавности внутреннего зацепления, замыкания сил в механизме, обуславливающими передачу меньших сил на корпус. К недостаткам планетарных передач относятся: · повышенные требования к точности изготовления и монтажа; · большое число подшипников качения; · необходимость использования долбяка (зубодолбежных станков) для нарезания колес с внутренними зубьями. Если в планетарной передаче создать условия, когда все основные звенья подвижны (освободив неподвижное колесо и придав ему вращение), передачу называют дифференциальной: такая передача позволяет суммировать движения двух звеньев на одном или раскладывать движения одного звена на два остальных (рис. 2.2).
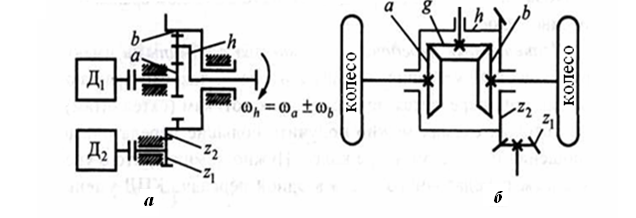
Рис. 2.2. Планетарные дифференциальные передачи: а – суммирующая скорости движения, б – раскладывающая скорости движения
Схема, приведенная на рис. 2.2, а, обеспечивает суммирование движений звена а (двигатель Д1) и звена b (двигатель Д2) на водиле h. Здесь между двигателем Д2 и колесом b поставлена дополнительная передача z1, z2 для получения необходимого вращающего момента на колесе b. Схема применяется в системах автоматического управления. Схема, приведенная на рис. 2.2, б, представляет собой дифференциал заднего моста автомобиля. Он состоит из конических зубчатых колес, которые насаживаются на ведущие полуоси автомобиля и сцепляются с сателлитом g, свободно сидящим на оси, закрепленной во вращающемся водиле h. Двигатель приводит водило в движение посредством конической зубчатой пары z1, z2 . Пока автомобиль движется по прямой дороге, силы сцепления колес с дорогой одинаковы, угловые скорости полуосей также одинаковы и равны угловой скорости водила. На закруглённом участке дороги колесо, движущееся по внешней кривой, проходит больший путь, чем колесо, движущееся по внутренней кривой. Если бы оба колеса автомобиля были закреплены на одной оси, то наблюдалось бы скольжение покрышек по дороге, что обусловливало бы их значительный износ. При использовании дифференциала сателлит g обкатывает колеса и одновременно вращается вокруг своей оси, в результате чего угловые скорости полуосей и ведущих колес автомобиля оказываются различными (т.е. при повороте одно колесо вращается быстрее другого). Скольжение покрышек по дороге прекращается или сводится к минимуму.
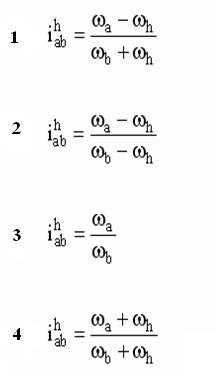
2.2. Передаточное отношение При определении передаточного отношения планетарной передачи используют метод Виллиса (метод остановки водила): всей планетарной передаче мысленно сообщают дополнительно вращение с угловой скоростью водила wh, но в обратном направлении. При этом водило как бы останавливается, а закрепленное колесо освобождается. Полученный при этом обращенный механизм (скорость водила Пусть для дифференциального механизма, изображенного на рис. 2.1 основные звенья имеют положительные угловые скорости Передаточное отношение примет выражение
где Передаточное отношение
имеет знак «–» для внешнего зацепления (ведущее и ведомые звенья вращаются в разные стороны) и имеет знак «+» для внутреннего зацепления (ведущее и ведомые звенья вращаются в одну сторону). В планетарной передаче любое основное звено может быть остановлено. Для планетарной передачи, у которой колесо b закреплено в корпусе неподвижно (wb = 0), колесо а является ведущим, а водило h – ведомым, из формулы (2.1) получим:
Отсюда следует
Для планетарной передачи, у которой колесо b закреплено в корпусе неподвижно (wb =0), водило h является ведущим, а колесо a – ведомым, имеем:
Таким образом, в зависимости от остановленного звена можно получить различные значения передаточного отношения планетарной передачи. Это свойство планетарных передач используют в коробках передач. 2.3. Вращающие моменты на основных звеньях При установившемся движении для системы (рис. 2.1) справедливы два уравнения: Ta+Tb+Th = 0 (при установившемся движении система находится в равновесии).
При wb = 0 имеем
При передаче движения от а к h
где Один из трех моментов (вращающий момент Та,Н∙м) определяется по известным мощности Ра,кВт и частоте вращения па,мин--1:
Два других находятся решением системы двух уравнений.
Так как 2.4. Силы в зацеплении Окружные силы в зацеплении вычисляют по вращающим моментам (Н∙м) и делительным диаметрам da, db, dg (мм) зубчатых колес (для передач без смещения):
где nw – число сателлитов, kw – коэффициент, учитывающий неравномерность распределения нагрузки между сателлитами (между потоками). На рис. 2.3, а показаны силы, действующие на один из сателлитов. Радиальные силы Frb =Ftatgaw и Frb = Ftb tgaw здесь уравновешены.
Рис. 2.3. Силы в зацеплениях сателлитов и методы их выравнивания: а – силы в зацеплениях; б – многоугольник сил для центральных колес; Если бы передача была совершенной (kw = 1), окружные силы на колесе а в зацеплении со всеми сателлитами были бы одинаковы по величине: Fta 1= Fta 2= = F ta 3 (тонкие линии многоугольника сил на рис. 2.3, б); в реальности силы распределены неравномерно (сказываются неточность изготовления, деформации под нагрузкой): Fta 1
2.5. Особенности расчета планетарных передач Расчет планетарных передач начинают с подбора чисел зубьев. Так как колеса взаимосвязаны, то наряду с выдержкой заданного передаточного отношения необходимо обеспечить следующие условия: соосности, симметричного расположения сателлитов, соседства. Для приведенной выше схемы планетарной прямозубой передачи (рис. 2.1) без смещения эти условия достигаются выполнением следующих действий. Число зубьев za центральной шестерни а задают из требованиянеподрезанияножки зуба: za Число зубьев zb неподвижного центрального колеса b определяют по заданному передаточному отношению ubah из формулы: Число зубьев zg сателлита g вычисляют из условия соосности. Условие соосности требует равенства межосевых расстояний различных пар зацепляющихся колес.
где d = mz – делительный диаметр соответствующего зубчатого колеса. Так как модули зацеплений планетарной передачи одинаковы, то формула (2.4) принимает вид:
Полученные числа зубьев za, zg, и zb проверяют по условиям симметричного расположения сателлитов (условие сборки) и соседства. Условие сборки симметричного расположения сателлитов требует, чтобы во всех зацеплениях центральных колес с сателлитами зубья одних совпадали с впадинамидругих (иначе собрать передачу нельзя). Проверено, что при симметричном расположении сателлитов условие сборки удовлетворяется, когда сумма зубьев центральных колес (za + zb) кратна числу сателлитов nw (обычно nw= 3), т.е. (za + zb)/nw равно целому числу. Условие соседстватребует, чтобы сателлиты не задевали зубьями друг друга. Для этого необходимо, чтобы сумма радиусов вершин зубьев соседних сателлитов, равная dga = m (zg + 2), была меньше расстояния l между их осями (см. рис. 2.3), т.е.
где aw = 0,5sin (za + zg) – межосевое расстояние. Из формулы (2.6) следует, что условие соседства выполнено, когда
2.6. Расчет планетарных передач на прочность Расчет на прочность планетарных передач ведут так же, как для обычных зубчатых передач. Расчет выполняют для каждого зацепления. В передаче, изображенной на рис. 2.1., необходимо рассчитать внешнее зацепление колес а и g и внутреннее – колес g и b. Так как модули и силы в этих зацеплениях одинаковы, а внутреннее зацепление по своим свойствам прочнее внешнего, то при одинаковых материалах колес достаточно рассчитать только внешнее зацепление. При определении допускаемых напряжений [ Для центральной шестерни где nw – число сателлитов; Lh – суммарное время работы передачи, ч; п'а = (na – nh) –относительная частота вращения центральной шестерни; па и nh – частоты вращения центральной шестерни и водила, мин –1. По п'а вычисляют окружную скорость, в соответствии с которой назначают степень точности передачи и выбирают коэффициенты КHV, КFV. Для сателлитов Nkg = 60 n 3 n'gLh, где n 3 – число нагружений зуба за один оборот сателлита; n'g = n'a za / zg – относительная частота вращения сателлита. Зуб сателлита за один оборот нагружается дважды – в зацеплениях с колесами а и b. Однако при определении числа циклов принимают п 3= 1, так как при расчете на контактную прочностьучитывают, что зуб сателлита работает с колесами а и b разными боковыми сторонами, а при определении для зубьев сателлита допускаемых напряжений изгиба[ σ ] Fg вводят коэффициент YА, учитывающий двухстороннее приложение нагрузки (симметричный цикл нагружения). Значения YA принимают: YA =0,65; 0,75; 0,9 соответственно для улучшенных, закаленных ТВЧ (или цементованных) и азотированных сталей. Межосевое расстояниепланетарной прямозубой передачи для пары колес внешнего зацепления (центральной шестерни с сателлитом) определяют по формуле:
где и' = zg / za – передаточное число пары колес; kw = 1,05... 1,15 – коэффициент неравномерности распределения нагрузки между сателлитами; Т 1 = Та – вращающий момент на валу центральной шестерни, Н∙м; nw - число сателлитов; ψba –коэффициент ширины венца колеса. Ширина bb центрального колеса b: bb = ψba aw. Ширину bg венца сателлита принимают на 2... 4 мм больше значения bb, центральной шестерни – Модуль зацепления m = 2 aw/ (zg + za). Полученный расчетом модуль округляют до ближайшего стандартного значения, а затем уточняют межосевое расстояние: aw = m(zg +za)/2. Расчет на изгиб выполняют как для обычных зубчатых передач. Контрольные вопросы 1. Какая зубчатая передача называются планетарной? Какова её конструкция и как она работает? 2. Как получить дифференциальную передачу? Какие возможности предоставляет дифференциальная передача? 3. Каковы основные достоинства и недостатки планетарных 4. Какой метод используют для определения передаточного отношения планетарной передачи? 5. Можно ли получить различные значения передаточного отношения планетарной передачи в зависимости от остановленного звена? 6. В чем сущность условий соосности, симметричного расположения сателлитов (сборки) и соседства планетарных передач?
7. Почему в планетарном редукторе центральную шестерню выполняют ("плавающей")? 8. По какой зависимости определяется передаточное отношение
3. ВОЛНОВЫЕ ПЕРЕДАЧИ
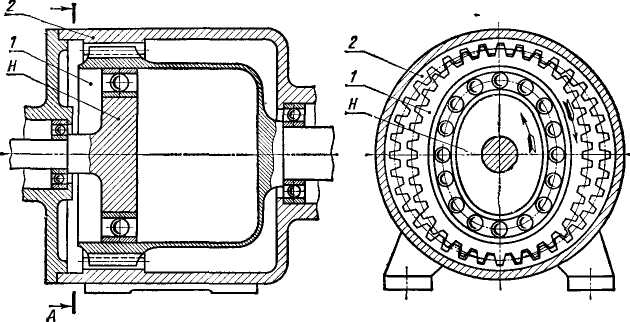
3.1. Общие сведения Волновой передачей называется механизм, содержащий контактирующие между собой гибкое и жесткие звенья и обеспечивающий передачу движения за счет бегущей волновой деформации гибкого звена. Существуют фрикционные, зубчатые и винтовые волновые передачи. Наиболее распространены зубчатые волновые передачи. Волновые зубчатые передачи кинематически представляют собой планетарные передачи с одним гибким зубчатым колесом. Наиболее распространенная волновая передача (рис. 3.1) состоит из водила Н, вращающегося гибкого колеса 1 с наружными зубьями и неподвижного жесткого колеса 2 с внутренними зубьями.
А А-А
Рис. 3.1. Волновая передача
Водило, являющееся генератором волн, состоит из овального кулачка и специального (гибкого за счет тонкостенных колец) шарикоподшипника. Такой подшипник допускает радиальную деформацию колец, соизмеримую с их толщиной, и обеспечивает передачу вращательного движения при деформированных кольцах. Кулачковый генератор лучше других сохраняет заданную форму деформирования под нагрузкой. Неподвижное колесо закрепляется в корпусе и представляет собой обычное зубчатое колесо с внутренним зацеплением. Гибкое зубчатое колесо выполнено в виде стакана с тонкой легко деформирующейся стенкой. В левой части стенки нарезаются зубья, правая часть повторяет форму вала. Длина стакана колеса приблизительно равна его диаметру. Жесткое зубчатое колесо соединено с корпусом. Зубья колес чаще всего эвольвентные. Делительный диаметр d 1гибкого колеса меньше делительного диаметра d2 жесткого колеса на величину d 2– d 1 = 2 W0. Размер овала подшипника качения водила по большой оси больше внутреннего диаметра обода гибкого колеса на величину 2 W0. При сборке в круглое гибкое колесо вставляют генератор волн, придающий колесу овальную форму (при этом как бы образуются два сателлита, связанные гибкой стенкой стакана), и вводят в зацепление с жестким колесом. В направлении большой оси эллипса зацепление зубьев гибкого колеса с зубьями жесткого колеса происходит по всей рабочей высоте зуба, в направлении малой оси эллипса зубья не зацепляются. Происходит это следующим образом: при деформировании гибкого колеса генератором волн зубья гибкого колеса под действием радиальных сил Fr перемещаются по радиусу и входят в зацепление с зубьями жесткого колеса в направлении большой оси эллипса. При переходе от большой оси к малой зубья гибкого колеса вследствие его деформации постепенно перемещаются к центру и выходят из зацепления с зубьями жесткого колеса. Между этими зонами зубья гибкого колеса погружены во впадины жесткого на разную глубину. В одновременном зацеплении находится большое число зубьев: 25–40 % от числа зубьев гибкого колеса. Даже при небольшой нагрузке на каждый зуб передача может передавать значительный вращающий момент. Пе   Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 = 0)представляет собой обычную непланетарную передачу, в которой геометрические оси всех колес неподвижны. Сателлиты при этом становятся промежуточными (паразитными) колесами, т.е. колесами, не влияющими на передаточное отношение механизма. Передаточное отношение в обращенном механизме определяют как в двухступенчатой передаче с одним внешним и одним внутренним зацеплением. Передаточное отношение определяют буквой с индексами, например
= 0)представляет собой обычную непланетарную передачу, в которой геометрические оси всех колес неподвижны. Сателлиты при этом становятся промежуточными (паразитными) колесами, т.е. колесами, не влияющими на передаточное отношение механизма. Передаточное отношение в обращенном механизме определяют как в двухступенчатой передаче с одним внешним и одним внутренним зацеплением. Передаточное отношение определяют буквой с индексами, например  , где нижние индексы – соответственно ведущее и ведомое звено, верхний – звено, обычно неподвижное, относительно которого рассматривается движение.
, где нижние индексы – соответственно ведущее и ведомое звено, верхний – звено, обычно неподвижное, относительно которого рассматривается движение. ,
,  ,
,  . После этого скорости звеньев изменятся и будут равны соответственно
. После этого скорости звеньев изменятся и будут равны соответственно 
 , (2.1)
, (2.1) и
и  – соответственно угловые скорости колес а и b относительно водила,
– соответственно угловые скорости колес а и b относительно водила,  и
и  числа зубьев колес a и b.
числа зубьев колес a и b.

 или
или 
 (2.2)
(2.2) (2.3)
(2.3) (при установившемся движении из условия сохранения энергии).
(при установившемся движении из условия сохранения энергии). и
и  .
. ,
, – коэффициент полезного действия, учитывающий потери при передаче движения.
– коэффициент полезного действия, учитывающий потери при передаче движения.
 ;
; ;
; .
. обычно велико, то вращающий момент на центральном колесе b мало отличается от момента на выходном валу:
обычно велико, то вращающий момент на центральном колесе b мало отличается от момента на выходном валу:  . Знаки моментов на колесах а и b одинаковые, а на ведомом – противоположный.
. Знаки моментов на колесах а и b одинаковые, а на ведомом – противоположный.
 ,
,
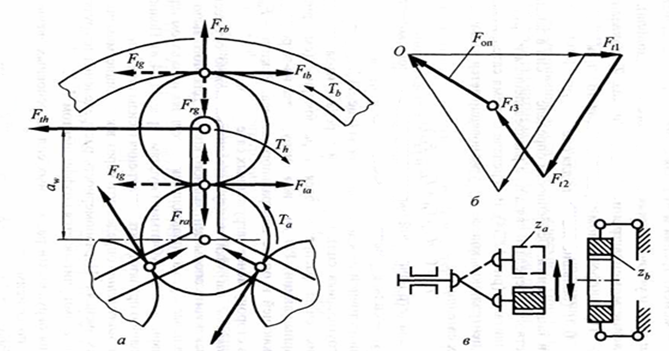
 Fta 2
Fta 2  F ta 3 (жирные линии многоугольника сил на рис. 2.3, б). Равновесие обеспечивается уравновешивающей силой Fоп, возникающей в опоре центрального колеса. Значения коэффициента kw при этом значительно больше единицы. Для уменьшения неравномерности распределения момента и выравнивания окружных сил колесо а выполняют без опор («плавающим») и соединяют его с ведущим валом с помощью зубчатой муфты, которая дает возможность компенсировать вероятные радиальные смещения
F ta 3 (жирные линии многоугольника сил на рис. 2.3, б). Равновесие обеспечивается уравновешивающей силой Fоп, возникающей в опоре центрального колеса. Значения коэффициента kw при этом значительно больше единицы. Для уменьшения неравномерности распределения момента и выравнивания окружных сил колесо а выполняют без опор («плавающим») и соединяют его с ведущим валом с помощью зубчатой муфты, которая дает возможность компенсировать вероятные радиальные смещения  шестерни (рис. 2.3, в). В этом случае колесо а под действием силы Fоп,самоустанавливается, стремясь достичь равновесного положения, преодолевая действие сил трения и инерции. При этом значения коэффициента kw становятсязначительно меньше – kw= 1,05... 1,15.
шестерни (рис. 2.3, в). В этом случае колесо а под действием силы Fоп,самоустанавливается, стремясь достичь равновесного положения, преодолевая действие сил трения и инерции. При этом значения коэффициента kw становятсязначительно меньше – kw= 1,05... 1,15. 17. Принимают za = 21 … 24 для Н
17. Принимают za = 21 … 24 для Н  350 НВ; za = 18…21 для 35 HRC < Н < 52 HRC и za = 17 при Н> 52 HRC.
350 НВ; za = 18…21 для 35 HRC < Н < 52 HRC и za = 17 при Н> 52 HRC. .
. (2.4)
(2.4) (2.5)
(2.5) (2.6)
(2.6)
 ] н, [
] н, [  ] f коэффициенты долговечности Z n и Y n находят по эквивалентным числам циклов нагружения
] f коэффициенты долговечности Z n и Y n находят по эквивалентным числам циклов нагружения 
 ?
?