|
|
Цифровые фотограмметрические системы для наземной фотограмметрии ⇐ ПредыдущаяСтр 9 из 9
Существует достаточно много фотограмметрических систем, предназначенных для решения не топографических задач по наземным снимкам. На рис. 1 представлена классификация этих систем. Эта классификация достаточно условная, но она дает представление о многообразии существующих систем.
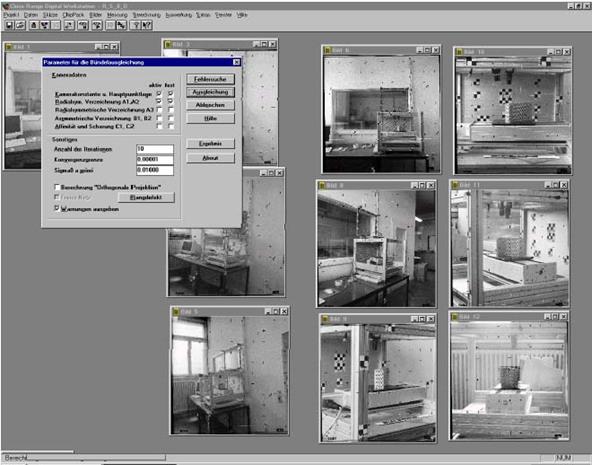
Рис. 1 В зависимости от принципа, положенного в основу измерения координат точек снимков фотограмметрические системы можно разделить на две большие группы: системы основанные на монокулярных и стереоскопических измерениях координат точек снимков. Системы первой группы предназначены в основном для изучения объектов в отдельных точках маркированных на поверхности объекта или в точках, являющимися четкими контурами. Системы второй группы применяются для построения цифровой модели объекта на основе стереоизмерений (автоматизированных или интерактивных) в любых точках поверхности объекта. В свою очередь фотограмметрические системы, основанные на монокулярных измерениях координат точек снимков можно также разделить на две группы. Это интерактивные и автоматические. Интерактивные системы. В этих системах объект снимается, как правило, одной камерой с различных точек фотографирования. В результате получают серию конвергентных (в общем случае) снимков. Измерения координат точек снимков (опорных, связующих и определяемых) выполняют монокулярно в интерактивном режиме, при этом отождествление соответственных точек на снимках выполняется оператором. В результате фототриангуляции по способу связок определяют элементы внешнего ориентирования снимков и координаты всех точек сети. Если требуется выполнить измерение дополнительных точек объекта, то в этом случае их координаты получаются в результате решения прямой многократной фотограмметрической засечки, используя элементы внешнего ориентирования снимков, определенных в результате фототриангуляции. Примером такой системы может служить CDW фирмы Rollei (рис. 2).
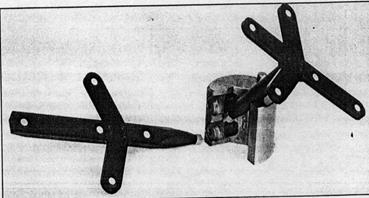
Рис.2 Основным применением таких систем является архитектура и машиностроение для изучения статических объектов, так как съемка выполняется одной камерой с разных точек пространства, поэтому объект не может изменяться во времени. Автоматические системы основаны на измерении маркированных точек, которые наносятся на исследуемый объект. При этом съемка объекта выполняется синхронно двумя или более камерами. Обработка снимков выполняется автоматически и заключается в идентификации соответственных точек на снимках, их измерении и выполнении фототриангуляции по способу связок. В результате фототриангуляции определяют координаты маркированных точек и элементы внешнего ориентирования снимков. Если используются неметрические камеры, то фототриангуляцию выполняют с самокалибровкой. На рис. 3 и 4 показаны примеры маркированных точек, которые применяются в системе V-STARS фирмы Leica.
Рис. 3
Рис.4
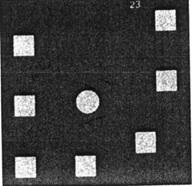
Для повышения надежности отождествления точек на перекрывающихся снимках некоторые системы используют маркированные точки с номерами в виде графических кодов. Каждый номер имеет свой индивидуальный графический образ. На рис. 5 приведен пример таких кодированных точек, разработанных фирмой Leica, а на рис. 6 – кодировка номеров точек предложенная ГОСНИИАС.
Рис. 5
Рис. 6 Соответствующие номера точек получают путем корреляции исходного изображения с эталонами графических образов номеров точек. Некоторые системы в качестве маркированных точек используют специальные проекторы и лазеры. Например, в системе «Mapvision» (рис. 7) применяется лазер для маркирования точки на поверхности объекта. В этом случае луч лазера сканирует
Рис. 7 поверхность объекта. При каждом положении луча лазера выполняется съемка двумя или более камерами. В результате на каждом снимке получается изображение только одной точки объекта, координаты которой в системе координат снимков определяются автоматически по известным алгоритмам. Проблема идентификации соответственных точек на снимках в этом случае отпадает, так как на всех снимках имеется изображение только одной точки. Затем, по этим координатам и известным элементам внешнего ориентирования снимков решается прямая многократная засечка для определения координат точки объекта. Такую систему удобно применять для изучения гладких поверхностей, например, для исследования полотна дороги (рис. 7). В случае применения проектора для задания на поверхности объекта сети маркированных точек, как это сделано в системе V-STARS фирмы Leica (рис. 8,9), на всех снимках одновременно изображаются все маркированные точки. В этом случае алгоритм получения координат точек объекта будет несколько другим. На первом этапе следует
Рис. 8
Рис. 9 выполнить автоматическое выделение всех точек на каждом снимке, затем определить соответствующие координаты этих точек в системе координат снимков. Теперь необходимо выполнить отождествление соответственных точек на снимках. Если съемка выполнялась тремя или более камерами (рис. 9) под разными углами, то отождествление можно осуществить достаточно просто, применяя теорию базисных линий (рис. 10).
Рис. 10
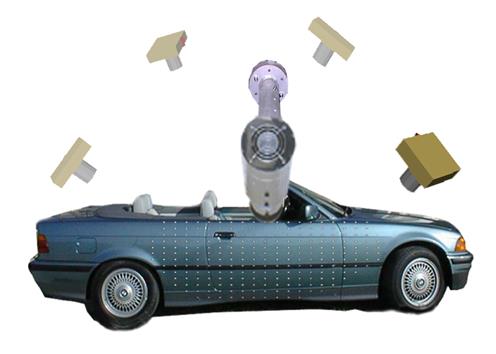
Для каждой точки (Р) первого снимка определяется множество точек (Рi) второго снимка, расстояние которых от базисной линии точки первого снимка на втором не более некоторого порога (точки - кандидаты). После этого определяются точки пересечения базисных линий точки первого снимка и точек - кандидатов второго снимка на третьем снимке. Соответствующей точкой на третьем снимке считается точка, для которой расстояние от какой-либо точки пересечения базисных линий до нее минимально. В результате применения этого алгоритма находятся сразу все соответственные точки на трех снимках. Затем решается прямая многократная засечка для определения пространственных координат точки объекта. Аналогичным образом поступают со всеми точками. Для решения прямых засечек необходимы элементы внешнего ориентирования снимков. Для их определения выполняют фототриангуляцию по снимкам тест-объекта или по снимкам исследуемого объекта с нанесенными на него опорными точками с графическими кодами номеров этих точек. На рис. 11 и 12 приведен пример использования
Рис. 11
Рис. 12
системы V-STARS фирмы Leica для исследования кузова автомобиля, на который наносятся маркированные точки. Система ProCam фирмы AICON (Германия) в качестве опорных точек использует пластины с нанесенной на них сетью точек с графическими кодами номеров (рис. 13). Эти пластины расставляются вокруг исследуемого объекта. Объект снимается на фоне этих пластин. Каждая пластина имеет свою систему координат, поэтому в процессе фототриангуляции определяются дополнительно по 6 элементов внешнего ориентирования каждой пластины относительно исходной. В качестве исходной может быть выбрана любая пластина.
Рис. 13
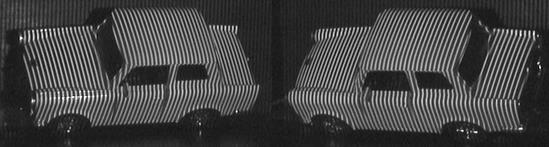
Фотограмметрические системы, предназначенные для создания цифровых моделей поверхности объекта можно разделить на две большие группы (рис. 1). Это системы, основанные на обработке стереопары и системы, использующие специальную подсветку объекта структурированным освещением. К фотограмметрическим системам первой группы можно отнести все системы, применяемые для обработки аэроснимков, такие как Фотомод, Талка, ЦФС, SOCET SET, ImageStation, VirtuoZO, OrthoBase и другие. Следует отметить, что эти системы применяются для обработки наземных снимков, полученных метрическими камерами. В этом случае обработка снимков ни чем не отличается от обработки аэроснимков. Некоторые из этих систем допускают применение не метрических камер, используя для этого проективные преобразования (Фотомод, SOCET SET и некоторые другие). Системы этой группы применяются в основном для целей архитектуры, в горном деле и т.д. Если поверхность исследуемого объекта достаточно гладкая, то методы корреляции, используемые для построения цифровых моделей рельефа в этом случае не работают. Поэтому для таких объектов разработаны специальные системы, использующие подсветку структурированным освещением. На рис. 14 приведена пример стереопары объекта в структурированном свете в виде случайного поля яркости, а на рис. 15 – в виде щелей.
Рис. 14
Рис. 15
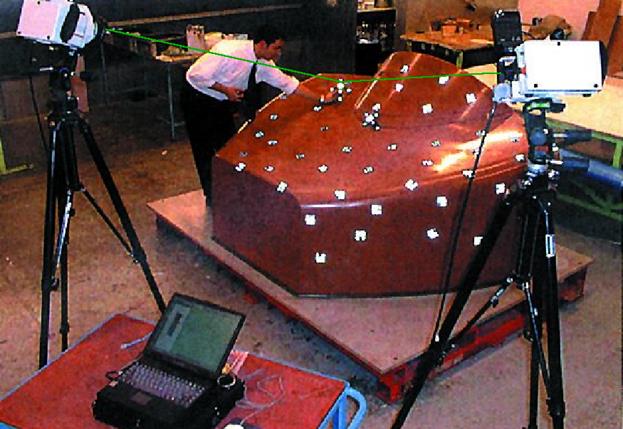
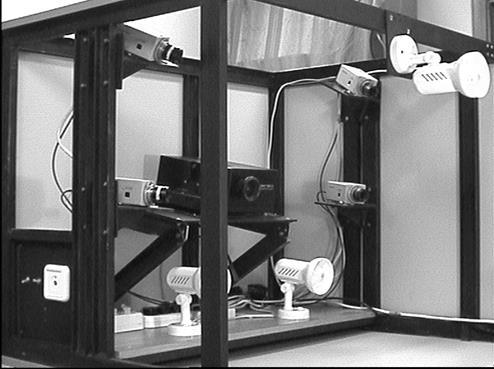
Если применяется подсветка в виде щели, то в этом случае объект можно снимать либо одной, либо двумя камерами. При применении одной камеры необходимо иметь калиброванный проектор, так как роль второй камеры выполняет сам проектор. Координаты точек объекта получаются как точки пересечения проектирующих лучей снимка и проектора. На рис. 16 и 17 приведены примеры системы InduScan, имеющей в своем составе две камеры (цифровые или фотокамеры UMK) и проектор случайного поля яркостей.
Рис.16
Рис. 17 На рис. 18 и 19 показана фотограмметрическая система, разработанная ГОСНИИАС для построения цифровых моделей черепов. Эта система состоит из 4 видео камер и проектора для подсвета объекта структурированным освещением в виде щели.
Рис.18
Рис.19 Существуют фотограмметрические системы, объединяющие в себе возможности всех перечисленных выше систем. Такие системы будем называть комбинированными. В них используются как маркированные точки, так и подсветка структурированным освещением. Примером таких систем может служить InduScan, GOM ATOS и некоторые другие.
  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|