
|
|
Пропорционально-интегральный регулятор, ПИ-регулятор.
Уравнение закона регулирования Передаточная функция Пи-регулятора Если внутренняя обратная связь охватывает исполнительный механизм (Рис. 9.1,а), то передаточная функция ПИ-регулятора
при тех же условиях
а значит передаточная функция УОС будет:
Таким образом, устройство обратной связи должно иметь характеристики реального дифференцирующего звена. Такая внутренняя обратная связь называется гибкой обратной связью и реализуется вне зависимости от типа ИМ: Если внутренняя обратная связь не охватывает ИМ (Рис. 9.1, б), то передаточная функция ПИ-регулятора будет
при принятых ранее условиях: Получим Допустим исполнительный механизм с пропорциональной скоростью, его передаточная функция
а передаточная функция УОС
Следовательно, УОС должно быть реальным дифференциальным звеном. Такой ПИ-регулятор называется регулятором с упругой обратной связью или изодромным. Если исполнительный механизм будет с характеристиками интегрального звена, т.е. ИМ с переменной скоростью, то его передаточная функция
а передаточная функция ПИ-регулятора:
следовательно, передаточная функция УОС
что соответствует
т.е. передаточной функции апериодического звена. Таким образом, внутренняя обратная связь является инерционной жесткой обратной связью.
Выбор типа регулятора. Во многих случаях возможность выбора регулятора по виду реализуемого в нем закона регулирования ограничена, поскольку большинство систем регулирования предназначено для автоматической стабилизации параметров при весьма ограниченном диапазоне их допустимых отклонений. Выбор закона регулирования осуществляется в зависимости от сложности ОР и требований к точности поддержания регулируемой величины. В тех случаях, когда допускаются относительно большие колебания регулируемого параметра, целесообразно устанавливать простейшие релейно-пропорциональные регуляторы, работающие по принципу «открыто – закрыто» и реализующие
При наладке этих регуляторов важно соблюдать одно требование Статическая характеристика
Рис. 9.2 Статическая характеристика Рп-регулятора.
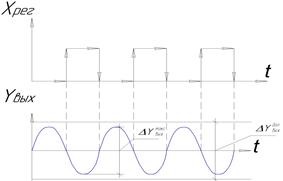
Динамическая характеристика
Рис. 9.3 Динамическая характеристика Рп-регулятора.
При более жестких требованиях к автоматической системе регулирования, например, при недопустимости автоколебательных режимов, возникающих в системах с позиционными
где
Для ОР без самовыравнивания П- регулятор устанавливается при условии, что
Если
  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 (9-18)
(9-18) (9-19)
(9-19) (9-20)
(9-20) ;
;  получаем в результате
получаем в результате , (9-21)
, (9-21) , (9-22)
, (9-22) (9-23)
(9-23) , (9-24)
, (9-24) , (9-25)
, (9-25) (9-26)
(9-26) , (9-27)
, (9-27) (9-28)
(9-28) , (9-29)
, (9-29) , (9-30)
, (9-30) , (9-31)
, (9-31) , (9-32)
, (9-32) -закон регулирования.
-закон регулирования. . То есть максимальное отклонение или ошибка регулируемого параметра в статике не должно быть больше допустимой. Для обеспечения этого условия пропускная способность регулирующего органа при его открытии должна превышать максимально возможное возмущение по нагрузке. Такой способ регулирования называется двухпозиционным – по числу позиций, которые может занимать регулировочный орган. При этом динамические процессы регулирования имеют колебательный характер.
. То есть максимальное отклонение или ошибка регулируемого параметра в статике не должно быть больше допустимой. Для обеспечения этого условия пропускная способность регулирующего органа при его открытии должна превышать максимально возможное возмущение по нагрузке. Такой способ регулирования называется двухпозиционным – по числу позиций, которые может занимать регулировочный орган. При этом динамические процессы регулирования имеют колебательный характер.
 -регуляторов. Основанием для установки
-регуляторов. Основанием для установки  ,
, -численное значение оптимальной степени обратной связи регулятора, численное значение которого определяется расчетом;
-численное значение оптимальной степени обратной связи регулятора, численное значение которого определяется расчетом; - установившееся значение регулируемой величины, определяется по кривой переходного процесса;
- установившееся значение регулируемой величины, определяется по кривой переходного процесса; - максимально допустимые по условиям технологического процесса или безопасной работы объекта остаточное отклонение регулируемой величины или ошибка регулирования;
- максимально допустимые по условиям технологического процесса или безопасной работы объекта остаточное отклонение регулируемой величины или ошибка регулирования; - максимально возможное ступенчатое возмущающее воздействие по нагрузке или эквивалентное возмущению воздействие со стороны регулировочного органа.
- максимально возможное ступенчатое возмущающее воздействие по нагрузке или эквивалентное возмущению воздействие со стороны регулировочного органа. ;
;