
|
|
ОСОБЕННОСТИ СТАТИКИ И ДИНАМИКИ ЭЛЕКТРОПРИВОДА КОНВЕЙЕРАМеханическая часть конвейера представляет собой сложную систему с распределенными по длине конвейера параметрами – массой перемещаемого груза, упругостью тягового органа и усилием статического сопротивления Упругость способствует возникновению колебаний, которые увеличивают динамические нагрузки рабочего оборудования Для качественного рассмотрения физического процесса, возникающего в пусковых режимах, реальная механическая система может быть представлена упрощенной динамической моделью, в которой распределенные массы, упругости и силы заменены эквивалентными сосредоточенными Основой для составления модели служит эпюра натяжения тягового органа конвейера в режиме пуска. Преобразованная эпюра натяжения имеет следующий вид:
mр, mо – результирующие массы рабочей и холостой ветвей конвейера с учетом приведенной к поступательному движению массы натяжного барабана
Ст экв – эквивалентная жесткость ветвей тягового органа Хп, Хр, Хо – координаты сосредоточенных масс соответственно mп, mр, mо
То – усилие натяжения Fст р, Fст о – результирующие усилия статического сопротивления рабочей и холостой ветвей тягового органа
Mп – момент привода Движение привода, согласно полученным уравнениям, описывается системой ДУ:
Решая систему ДУ относительно координат перемещения привода хп ,, получим ДУ:
Резонансные частоты механической части конвейера выражаются через собственные частоты собственных колебаний отдельных масс:
В процессе пуска при Fп=const на среднее значение ускорения, определяемое правой частью предыдущего уравнения, накладывается колебания с частотой Ωр1 и Ωр2 Для тяжелых и длинных конвейеров из-за больших поступательных движущихся масс частоты Ωр, Ωо значительно меньше Ωп и следовательно резонансные частоты Ωр1 и Ωр2 имеют следующий вид:
Если период низкочастотных колебаний
Максимальные ускорения существенно превышают его среднее. Это превышение тем больше, чем меньше масса привода относительно поступательно движущих масс конвейера Амплитудные значения ускорения создают опасность проскальзывания ленты или каната относительного приводного элемента Колебательный характер процесса пуска обуславливает динамические перегрузки тягового элемента Возникающие при пуске колебания демпфируются за счет вязкого трения во всей подвижной части привода внутри тягового элемента В конце процесса пуска, когда двигатель выходит на жесткую механическую характеристику, колебания эффективно демпфируются за счет самого привода Наиболее тяжёлый режим колебаний возникает при пуске ленточных конвейеров длиной в тысячи метров, используемых на открытых разработках полезных ископаемых При пуске таких конвейеров приходится учитывать скорость распространения упругих колебаний вдоль тягового элемента Если время пуска двигателя меньше времени распространения упругой волны от приводного элемента до натяжного, то двигатель успевает приобрести полную рабочую скорость, а хвостовой элемент тягового элемент остается неподвижным. Это означает, что когда упругая вона дойдет до конца конвейера, то к его хвостовым массам прикладывается импульс полной рабочей скорости. Происходит упругий удар, подобный рывку при выборе слабины каната приводом подъема крана. Упругая волна, отражаясь, возвращается к приводному элементу, возникающие при этом волновые процессы аналогичны таковым в длинных линиях электропередач Для того чтобы ослабить упругий удар и уменьшить распространяемый импульс скорости в таких конвейерных линиях используют пуск на предварительную пониженную скорость и уже с этой скорости выполняют пуск на полную рабочую скорость Для уменьшения колебания подвешенного груза, возникающего в процессе пуска, необходимо осуществить ограничение ускорения и рывка, что приводит к уменьшению динамических нагрузок в тяговом органе Одну из важнейших проблем для многодвигательного ЭП является обеспечение равномерно распределённых нагрузок между двигателем При параллельном включении двигателей, имеющих равные скорости идеального холостого хода и связанных общим механическим валом, нагрузка между линиями распределяется пропорционально модулю жёсткости механических характеристик Применительно к двухдвигательному приводу моменты М1, М2 определяются:
β1, β2 – модули жесткости механических характеристик 1 и 2 двигателя Мст – результирующий момент сопротивления приводной станции Если каждый из этих двух двигателей выбран на номинальный В приводных станция, где двигатели механически соединяются через упругих тяговый элемент, проблема выравнивания нагрузок под двигателем имеет свои особенности. Рассмотрим их на примере двух барабанной приводной станции ленточного конвейера:
Рис.1. Схема двух барабанной приводной станции ленточного конвейера Натяжение Т2 ленты в точке набегания 2 второго барабана < чем натяжение Т1 в точке набегания 1 первого барабана, поэтому сечение ленты Q1 и ее плотность γ1 точки 1 меньше, чем сечение Q2 и плотность γ2 ленты в точке 2 Т.к. масса ленты, проходящая в единицу времени одинакова для любой точки конвейера, то можно записать следующую формулу:
Подставляя в предыдущее выражение и переходя к угловой скорости получаем
Е – модуль упругости при растяжении тягового элемента Q – cечение ленты в недеформированном состоянии Т.к. Т1 > Т2, то ω1 > ω2 и при идентичности механических характеристик двигатель, имеющий меньшую угловую скорость испытывает большую нагрузку, чем другой
Рис.2. Механическая характеристика В общем случае модули жесткости β1 и β2 механических характеристик двигателя могут быть различными, при этом момент первого и второго двигателя М1 и М2 будут определяться:
Т.к. результирующий момент сопротивления Мст=М1+М2, то в последующем выражении и с учетом того, что скорости двигателе связаны соотношением
Приравнивая (1) и (2), находим условие равномерного распределения нагрузки между двигателями
ЭП МЕХАНИЗМОВ НЕПРЕРЫВНОГО ДЕЙСТВИЯ С МСТ=CONST Наиболее распространённым видом ЭП непрерывного действия является нерегулируемый ЭП переменного тока на основе АД или СД. Для установок, где не возникает необходимость регулирования скорости двигателя и момента при пуске находят применение АД с КЗР с двойной беличьей клеткой или глубоким пазом. Они обладают повышенным пусковым моментом при относительно неизменном его значении при пуске и обеспечивают меньший нагрев двигателя в условиях продолжительного пуска Мощность привода с асинхронным КЗ ротором ограничивается несколькими сотнями кВт. Использование двигателя большей мощности приводит к заметному снижению коэффициента мощности питающего сети, а также существенному падению напряжения сети при пуске конвейера Применение синхронного двигателя для более мощных установок позволяет существенно повысить энергетические показатели привода, но установки такой мощности обладают большой механической инерционностью и характеризуются тяжелым продолжительным пуском, достигающим 30-100 секунд. Такой пуск может вызвать недопустимое превышение температуры СД, а также недопустимое снижение напряжения сети на относительно большом интервале времени разгона. Поэтому СД широкого распространения в качестве привода конвейерных установок широкого распространения не получили Проблема пуска мощных конвейеров может решаться применением АД с ФР. При реостатном способе управления плавность пуска обеспечивается за счет увеличения числа пусковых ступеней, но это вынуждает использовать громоздкие релейно-контакторные панели с большим количеством тяжелой коммутационной аппаратуры. Указанного недостатка лишена схема управления АД с тиристорным коммутатором в роторной цепи Работа схемы построена на широтно-импульсном способе регулирования дополнительного сопротивления R1 роторной цепи. Тиристор VS1 выполняет функции ключа роторной цепи, который попеременно включается и отключается, тем самым изменяется эквивалентное дополнительное сопротивление роторной цепи в пределах от 0, когда ключ замкнут (механическая характеристика 1), до значения R1 при разомкнутом ключе (механическая характеристика 2)
Управление тиристорным ключом осуществляется релейным регулятором тока (РТ) функции выпрямленного тока Id.
Рис.3. Схема
При этом образуется колебательный контур С-L2, способствующий быстрому перезаряду конденсатора, благодаря диоду VD1, включенному в этот колебательный контур процесс перезаряда заканчивается, как только ток конденсатора снизится до 0 и конденсатор остается заряженным со знаком + на нижней обкладке если при снижении тока ИД разность Включённая цепь выпрямленного тока реактора L1 снижает пульсации выпрямленного тока и момента обеспечивает на начальном участке пуска плавное его нарастание Кп - аварийное отключение В ЭП конвейерных установок находят применение системы, в которых движение от нерегулируемых СД или АД с КЗР передаётся на механизм через регулируемую гидравлическую, порошковую или электромагнитную муфту
К достоинствам данного ЭП можно отнести: ¾ простоту надежность ЭП ¾ облеченный курс двигателя, осуществляемый при невозбужденной муфте ¾ возможность плавного изменения жесткости механической характеристики, благодаря чему сравнительно просто обеспечивается равномерное распределение нагрузки между двигателями в многодвигательном ЭП ¾ Для конвейеров, где требуется длительный режим работы ЭП на низких скоростях, используется система тиристорный преобразователь частоты - АД, в котором может осуществляться регулирование скорости и ускорения Эскалатор Машина непрерывного действия, используемые для перевозки пассажиров, называется эскалатором. Скорость движения ленточного полотна эскалатора выбирается в пределах от 0,45 до 1,0 м/с. Каждая ступень рассчитывается на 2 человека. Практика показывает, что эскалаторы целесообразно применять при высоте подъема от 4 до 65м и с углом наклона 30 градусов Производительность эскалатор не зависит от высоты подъёма и определяется по формуле
P – Производительность, т.е. число пассажиров, перевозимых в час
Е – Число пассажиров на ступенях
z – Шаг ступени
Мощность приводного двигателя эскалатора определяется:
n – Число пассажиров, на которое рассчитывается ступень, обычно 2 С – Число ступеней на наклонной части эскалатора q – Вес среднего пассажира, q=700-800Н
После выбора двигателя по условиям статического режима работы он должен быть проверен по условиям максимальной загрузки пускового периода. Ускорение а не должно превышать 0,6-0,7 м/с2 при пуске, оно обусловлено безопасностью пользования эскалатора Для ограничения бросков тока, а также некоторого снижения момента двигателя и ускорения ЭП при пуске в цепь статора вводится дополнительное сопротивление. В ЭП эскалаторов применяется аппаратура нормального исполнения и двигатели современных серий (4А, 5А) с КЗР или ФР. Мощность двигателя варьируется от 10 до 200 кВт в зависимости от протяженности эскалатора МОСТОВЫЕ КРАНЫ Существует большое разнообразие конструкций кранов. Основными конструкциями кранов являются: ¾ Мостовые ¾ Козловые или портальные ¾ Поворотные ¾ Перегрузочные ¾ Тельферы (электроталь) ¾ Специальные краны. К ним относят краны, имеющие специальные захватывающие устройства ¾ Загрузочные (завалочные) краны, обслуживающие мартеновские печи Кроме специальных кранов, работающих в специальных территориях, большой удельный вес имеют передвижные краны – автомобильные, гусеничные, железнодорожные, плавучие Мостовые краны состоят из моста, передвигающего на катках или колесах по подкрановым балкам или рельсам. Рельс устанавливаются на выступах колонн или выступах стен. Вдоль моста перемещается в обоих направлениях тележка, снабженная ходовым механизмом с катками или колесами. На тележке помещается подъемный механизм – лебедка, связанная стальными канатами с захватывающим груз крюком или другим захватывающим устройством Мостовые краны строятся на различные номинальные грузоподъемности G= 1-1000т. Под грузоподъемностью понимается наибольший вес груза, допускаемый к подъему и передвижению на кране. С 15-20т возможно использование вспомогательного подъема Мостовые краны имеют 3 движения: 1. Движение моста вдоль подкрановых балок вдоль цеха 2. Движение тележки вдоль моста 3. Подъем и спуск груза Электрооборудование крановых установок: 1. Крановые ЭД 2. контроллеры 3. сопротивления 4. тормозные электромагниты 5. конечные выключатели 6. Защитные панели 7. Главные мостовые троллеи 8. Токоприёмники 9. Преобразовательные устройства (тиристорный преобразователь ТП, ТПН, преобразователи частоты статические) Рис.1. Принципиальная схема питания крановой установки   Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 - масса привода
- масса привода - упругие усилия рабочей и холостой ветвей тягового органа
- упругие усилия рабочей и холостой ветвей тягового органа



 превосходит время разгона привода до рабочей скорости, то на процесс пуска будут сказываться только высокочастотные колебания. В этом случаем низкочастотными колебаниями можно пренебречь и предыдущее ДУ примет вид:
превосходит время разгона привода до рабочей скорости, то на процесс пуска будут сказываться только высокочастотные колебания. В этом случаем низкочастотными колебаниями можно пренебречь и предыдущее ДУ примет вид:
 , то двигатель с большим значением β окажется перегруженным. При длительном режиме работы даже небольшая перегрузка может вывести из строя двигатель, поэтому должно β1= β2. Для выполнения этого условия применяют строго идентичные по исполнению мощности и скорости двигателей. Если же жесткости их характеристик различаются, то, например, для АД с ФР более жесткая характеристика смягчается за счет введения в роторную цепь дополнительного сопротивления
, то двигатель с большим значением β окажется перегруженным. При длительном режиме работы даже небольшая перегрузка может вывести из строя двигатель, поэтому должно β1= β2. Для выполнения этого условия применяют строго идентичные по исполнению мощности и скорости двигателей. Если же жесткости их характеристик различаются, то, например, для АД с ФР более жесткая характеристика смягчается за счет введения в роторную цепь дополнительного сопротивления

 -Линейные скорости ленты на входных точках первого и второго барабана
-Линейные скорости ленты на входных точках первого и второго барабана - Изменение плотности ленты обусловлены изменением ее объема при деформации растяжения
- Изменение плотности ленты обусловлены изменением ее объема при деформации растяжения -относительные удлинения ленты в точках 1 и 2, обусловленные натяжением Т1 и Т2
-относительные удлинения ленты в точках 1 и 2, обусловленные натяжением Т1 и Т2


 , то получаем
, то получаем

 Рис.4. Механическая характеристика
Рис.4. Механическая характеристика
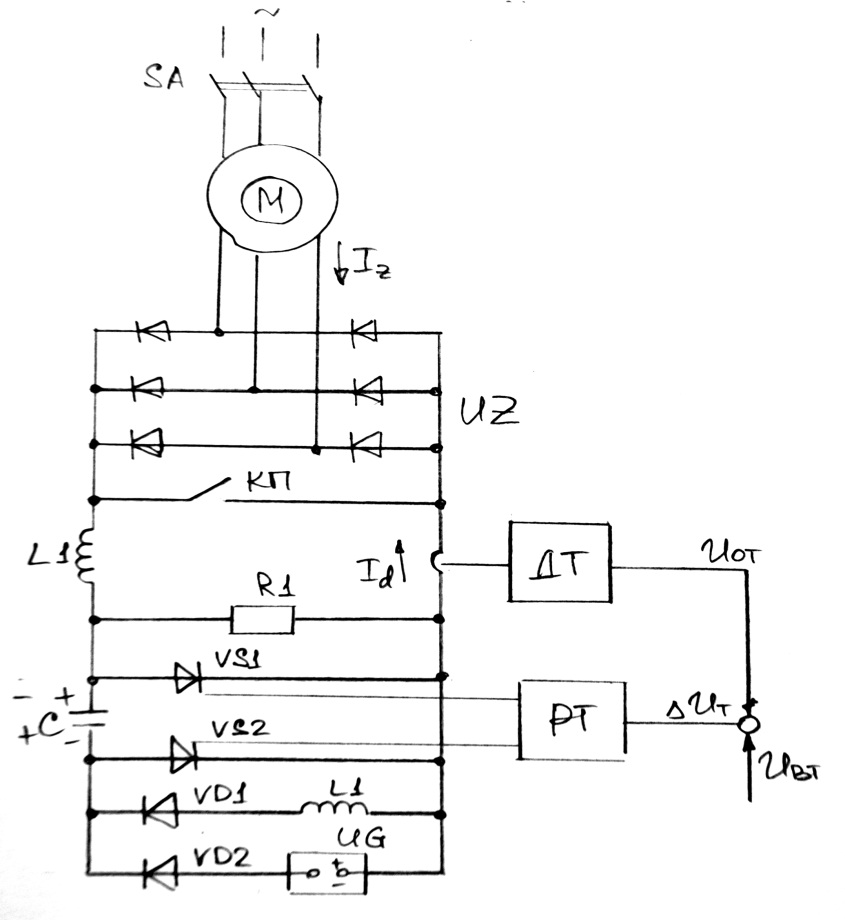
 , то РТ подает управляющий импульс тиристор VS1, VS1 открывается и шунтирует сопротивления R1, что вызывает возрастание тока Id. При этом через открывшийся VS1 происходит заряд конденсатора С от источника UG. Когда
, то РТ подает управляющий импульс тиристор VS1, VS1 открывается и шунтирует сопротивления R1, что вызывает возрастание тока Id. При этом через открывшийся VS1 происходит заряд конденсатора С от источника UG. Когда  РТ подает управляющий импульс на VS2, который открываясь создает разрядный контур для конденсатора С. Под действием разрядного тока конденсатора С тиристор VS1 закрывается. А конденсатор С продолжает перезаряжаться от напряжения роторной цепи. По окончании процесса перезаряда тиристор VS2 запирается. Введеное сопротивление R1 снижает тока Id и при
РТ подает управляющий импульс на VS2, который открываясь создает разрядный контур для конденсатора С. Под действием разрядного тока конденсатора С тиристор VS1 закрывается. А конденсатор С продолжает перезаряжаться от напряжения роторной цепи. По окончании процесса перезаряда тиристор VS2 запирается. Введеное сопротивление R1 снижает тока Id и при  вновь открывает тиристор VS1
вновь открывает тиристор VS1 снова станет больше 0, вновь будет открыт тиристор VS1 и все повторится
снова станет больше 0, вновь будет открыт тиристор VS1 и все повторится
 – Коэффициент заполнения полотна эскалатора
– Коэффициент заполнения полотна эскалатора – Скорость
– Скорость
 – угол наклона эскалатора
– угол наклона эскалатора – КПД
– КПД