|
|
Частотные критерии устойчивости САУЭто графоаналитические методы, позволяющие по виду частотных характеристик САУ судить об их устойчивости. Их общее достоинство в простой геометрической интерпретации, наглядности и в отсутствии ограничений на порядок дифференциального уравнения. Запишем характеристическое уравнение САУ в виде D(p) = a0 Его корни Pi = αi + jωi = |pi|ejarg(pi), где arg(pi) = arctg(ωi/ai) + k π;
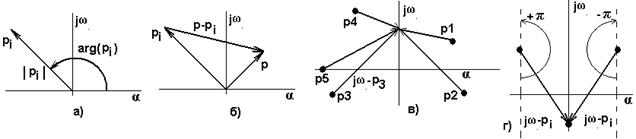
Каждый корень можно изобразить вектором на комплексной плоскости (рис.6.13а), тогда разность p - pi изобразится разностью векторов (рис.6.13б), где p - любое число. Если менять значение p произвольным образом, то конец вектора p - pi будет перемещаться по комплексной плоскости, а его начало будет оставаться неподвижным, так как pi - это конкретное неизменное значение. В частном случае, если на вход системы подавать гармонические колебания с различной частотой ω, то p = jω, а характеристическое уравнение принимает вид: D(jω) = a0 (jω - p1) (jω - p2)... (jω - pn).
Рисунок 6.13 – К определению корней характеристического уравнения на комплексной плоскости.
При этом концы векторов j ω - pi будут находиться на мнимой оси (рис.6.13в). Если менять ω от - Характеристическое уравнение можно представить в виде
D(jω) = |D(jω)|ejarg(D(jω)), где |D(jω)| = a0 arg(D(jω)) = arg(jω - p1) + arg(jω - p2) + …+ arg(jω - pn).
Пусть из n корней m - правые, а (n – m) - левые, тогда угол поворота вектора D(j ω) при изменении ω от -
или при изменении ω от 0 до +
Отсюда вытекает правило: изменение аргумента вектора D(j ω) при изменении частоты Это правило называется принцип аргумента. Он положен в основе всех частотных критериев устойчивости. Мы рассмотрим два наиболее распространенных критерия: критерий Михайлова и критерий Найквиста. Критерий устойчивости Михайлова. Так как для устойчивой САУ число правых корней m = 0, то угол поворота вектора D(j
САУ будет устойчива, если вектор D(j При этом конец вектора опишет кривую, называемую годографом Михайлова. Она начинается на положительной полуоси, так как D(0) = an, и последовательно проходит против часовой стрелки n квадрантов комплексной плоскости, уход в бесконечность в n - ом квадранте (рис.6.14а). Если это правило нарушается (например, число проходимых кривой квадрантов не равно n, или нарушается последовательность прохождения квадрантов (рис.6.14б), то такая САУ неустойчива - это и есть необходимое и достаточное условие критерия Михайлова. Этот критерий удобен своей наглядностью. Так, если кривая проходит вблизи начала координат, то САУ находится вблизи границы устойчивости и наоборот. Этим критерием удобно пользоваться, если известно уравнение замкнутой САУ. Для облегчения построения годографа Михайлова выражение для D(j ω) представляют суммой вещественной и мнимой составляющих: D(jω) = a0(jω - p1)(jω - p2)...(jω - pn) = a0(jω)n + a1(jω)n - 1 +... + an = ReD(j ω) + jImD(j ω), где: ReD(jω) = an - an - 2 ω 2 + an- 4 ω 4 -..., ImD(jω) = an - 1 ω - an - 3 ω 3 + an- 5 ω 5 -.... Меняя ωот 0 до
Рисунок 6.14 – Годограф Михайлова.
Критерий устойчивости Найквиста. Этот критерий позволяет судить об устойчивости замкнутой САУ по виду АФЧХ разомкнутой САУ (рис.6.15). Исследование разомкнутой САУ проще, чем замкнутой. Его можно производить экспериментально, поэтому часто оказывается, что АФЧХ разомкнутой САУ мы имеем или можем получить. Передаточная функция разомкнутой САУ: Wp(p) = Wp(p)/Dp(p) и ее уравнение динамики: y(t) = или Dp(p) y(t) = Kp(p ε(t), где Dp(p) – характеристическое уравнение разомкнутой САУ; Kp(p) - операторный коэффициент передачи разомкнутой САУ; ε(t) - рассогласование на входе разомкнутой САУ. По виду корней уравнения Dp(p) = 0 можно судить об устойчивости разомкнутой САУ. Но это пока ничего не говорит об устойчивости замкнутой САУ. Для того, чтобы получить уравнение динамики замкнутой САУ при свободном движении, считаем, что внешнее воздействие u = 0, тогда на вход первого звена САУ подается сигнал рассогласования ε(t) = u(t) - y(t) = - y(t). То есть Dp(p) y(t) = Kp(p (- y(t)), следовательно, уравнение замкнутой САУ: (Dp(p) + Kp(p)) y(t) = 0.
Рисунок 6.15 – К использованию критерия устойчивости Найквиста. Таким образом, характеристическое уравнение замкнутой САУ: Dз(p) = Dp(p) + Kp(p) = 0. По виду его корней уже можно судить об устойчивости замкнутой САУ. Воспользуемся вспомогательной функцией: F(j ω) = 1 + Wр(j ω) = По сути дела она представляет собой АФЧХ разомкнутой САУ, сдвинутую на единицу вправо. Степени полиномов Dз(j ω ) и Dp(j ω ) равны n. Эти полиномы имеют свои корни pзi и ppi, то есть можно записать: F(jω) = Каждую разность в скобках можно представить вектором на комплексной плоскости, конец которого скользит по мнимой оси ω. При изменении ω от - Пусть полином Dз(jω) имеет m правых корней и n - m левых, а полином Dp(j ω) имеет g правых корней и n - g левых. Тогда суммарный угол поворота вектора функции F(j ω) при изменении частоты ω от -
Если замкнутая САУ устойчива, то m = 0, тогда суммарный поворот вектора F(j ω) при изменении ω от - Отсюда можно сформулировать критерий устойчивости Найквиста: если разомкнутая САУ неустойчива и имеет g правых корней, то для того чтобы замкнутая САУ была устойчива, необходимо и достаточно, чтобы вектор F(jω) при изменении ω 0 до + На рис.6.16а приведены АФЧХ разомкнутых САУ, устойчивых в замкнутом состоянии, на рис. 6.16б - замкнутая САУ неустойчива. На рис. 6.16в и 6.16г показаны АФЧХ разомкнутых астатических САУ, соответственно устойчивых и неустойчивых в замкнутом состоянии. Их особенность в том, что АФЧХ при ω → 0 уходит в бесконечность.
разомкнутых и замкнутых САУ.
В этом случае при использовании критерия Найквиста ее мысленно замыкают на вещественную ось по дуге окружности бесконечно большого радиуса. Критерий Найквиста очень нагляден. Он позволяет не только выявить, устойчива ли САУ, но и, в случае, если она неустойчива, наметить меры по достижению устойчивости.
Качество регулирования САУ Качество работы САУ оценивают по величинам статической и динамической ошибок. По этим характеристикам автоматические системы бывают статические и астатические. Статическая ошибка - это разность величин регулируемого параметра в исходном и конечном (после окончания регулирования) состояниях равновесия системы.
Рисунок 6.17 – График регулирования астатической (а) и статической (б) САУ. В астатической системе статическая ошибка равна нулю, т.е. система после процесса регулирования возвращается в исходное состояние равновесия. В астатических САУ конечное и исходное равновесие совпадает с заданием. Поэтому в этих САУ динамическая ошибка равна максимальному отклонению параметра в процессе регулирования (рис. 6.17а). В статической системе в установившемся состоянии - через достаточно долгое время после начала регулирования τ, всегда имеется статическая ошибка регулирования (рис.6.17б). Динамическая ошибка - это максимальное в процессе регулирования отклонение регулируемого параметра от конечного состояния равновесия Δдин= (Yвых маx - Yвых ном). Время регулирования - это отрезок времени Δτ с момента нанесения на замкнутую САУ возмущающего воздействия, по истечении которого отличие регулируемого параметра от конечного состояния равновесия становится равным и меньше ± 5% от заданной величины. Если заданная величина равна нулю, то ± 5% берут от величины динамической ошибки. Перерегулирование - это динамическая ошибка, отнесённая к номинальной величине регулируемого параметра в процентах. Перерегулирование вычисляют по формуле: σ = (Yвых маx - Yвых ном)100%/Yвых ном . Степень затухания - это показатель качества, который характеризует, насколько процентов уменьшается амплитуда колебаний выходного сигнала системы за один период колебаний. Степень затухания Ψ определяется по формуле:
ψ = (Δдин - Δ3)100%/ Δдин ,
где: Δз - амплитуда колебаний третьего периода. Если Δз = 0, то Ψ = 100%. Обобщённый показатель качества. Для определения величины этого показателя вычисляют интеграл (площадь подынтегральной фигуры) изменения в процессе регулирования выходного сигнала системы за период времени регулирования: tрег J = ∫ (Δ)2dt. 0 Δ – амплитуду колебаний берут в квадрате, чтобы просуммировать как положительные, так и отрицательные отклонения выходного сигнала. Естественно, чем меньше динамическая, статическая ошибки и время регулирования, тем меньше величина интеграла J и выше качество работы САУ. Оптимальные процессы регулирования. На практике часто требования к качеству работы проектируемой САУ задаются не в виде величины отдельных показателей качества, а в виде требования реализации одного из трёх оптимальных процессов регулирования. Первый из них - апериодический процесс регулирования показан на рис. 6.18а. Регулируемый параметр после отклонения плавно возвращается к заданной величине. В этом процессе по сравнению с двумя последующими будет минимально время регулирования, но максимальна динамическая ошибка. Второй - процесс регулирования с 20% перерегулированием условно дан на рис. 6.18б. В этом процессе по сравнению с апериодическим меньше динамическая ошибка, но больше время регулирования. Для этого процесса перерегулирование не должно превышать 20%. Третий- процесс регулирования с минимальным интегральным показателем качества (рис. 6.18в). В этом процессе регулирования интегральный показатель качества сведён к минимуму, а из трёх рассмотренных оптимальных процессов регулирования будет минимальная динамическая ошибка, но время регулирования - максимальное. Выбор оптимального процесса из трёх определяется видом технологического процесса объекта управления. Иногда кратковременная большая динамическая ошибка может быть очень опасна. Например, при управлении давлением пара в котле. Для такого объекта апериодический процесс не самый лучший. В некоторых случаях большое время перерегулирования может быть опасным для проведения операции - например, при выпечке хлеба, значительное повышение температуры в печи не может быть длительным. Синтез и коррекция САР В ТАУ можно выделить две характерные задачи: 1) в заданной САУ найти и оценить переходные процессы - это задача анализа САУ; 2) по заданным переходным процессам и основным показателям разработать САУ - это задача синтеза САУ. Вторая задача сложнее ввиду своей неоднозначности, многое определяется творческими способностями проектировщика. Поэтому обычно задача синтеза САУ ставится ограниченно. Считается, что основная часть системы уже задана, что обычно имеет место. Требуется синтезировать корректирующие звенья, то есть выбрать их схему и параметры. При этом необходимо, чтобы в результате коррекции САУ обеспечивался требуемый запас устойчивости, точность управления в установившихся режимах и качество управления в динамических режимах.
Рисунок 6.18 – Оптимальные процессы регулирования: а) апериодический; б) колебательный с 20% перерегулированием; в) колебательный с минимальным интегральным показателем качества
В тех случаях, когда устойчивость и необходимые качества не могут быть достигнуты путем изменения параметров системы (коэффициентов передачи, постоянных времени), то применяется коррекция. Коррекция представляет собой введение в систему дополнительных элементов, называемых корректирующими. Корректирующие элементы (устройства) могут быть включены в структуру САР различными способами. Корректирующее устройство может быть включено в прямую цепь последовательно (рис.6.19). Последовательные корректирующие устройства обычно применяют в тех случаях, когда сигнал управления представляет собой напряжение постоянного тока. Если корректирующее устройство вводит производную от сигнала рассогласования D, то происходит увеличение запаса устойчивости и повышение качества переходного процесса. При введении интеграла и производной от сигнала рассогласования обеспечивается астатизм в сочетании с сохранением устойчивости и качества переходной характеристики.
Рисунок 6.19 – Последовательная коррекция.
Применяется также включение корректирующего устройства в виде обратной связи (рис.6.20).
Рисунок 6.20 – Коррекция в виде обратной связи.
Обычно параметры корректирующего устройства выбирают таким образом, чтобы выполнялось соотношение:
В этом случае свойства участка цепи, где включена коррекция и изменены её параметры, не оказывают влияния на свойства всей системы. Это важное свойство является причиной широкого применения коррекции в виде обратной связи. Обратная связь здесь обычно является отрицательной. Применяется третий способ коррекции - параллельный (рис.6.21). Параллельная коррекция имеет меньшие возможности, чем две предыдущие разновидности. Вместе с тем параллельное корректирующее устройство при меньшей сложности обеспечивает нужное преобразование сигнала рассогласования. Выбор параметров корректирующих устройств производится исходя из критериев устойчивости и проверяется по оценкам качества переходных процессов.
Рисунок 6.21 – Параллельная коррекция.
Контрольные вопросы к главе 6. 1. Что называется частотными критериями устойчивости САУ? 2. В чем преимущество частотных критериев устойчивости перед алгебраическими? 3. Сформулируйте критерий устойчивости Михайлова. Сформулируйте критерий устойчивости Найквиста. 4. По каким величинам оценивают качество работы САУ? 5. Что такое статическая ошибка? 6. Что такое динамическая ошибка? 7. Дайте определение астатической системы. 8. Дайте определение статической системы. 9. Что такое время регулирования? 10. Что такое перерегулирование? 11. Что такое степень затухания? 12. Что понимают под обобщенным показателем качества работы САУ? 13. Дайте понятие апериодического процесса регулирования. 14. Дайте понятие колебательного процесса регулирования. 15. Как подобрать передаточную функцию корректирующего устройства при компенсации возмущающего воздействия? 16. Какие характерные задачи решаются при проектировании САУ? 17. Что называется синтезом САУ? 18. Как включаются корректирующие устройства?   Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 (p - p1)
(p - p1)  .
.
 до +
до +  = (n - m)π - mπ,
= (n - m)π - mπ, = (n - 2m) (π /2).
= (n - 2m) (π /2). от -
от -  = nπ/2.
= nπ/2.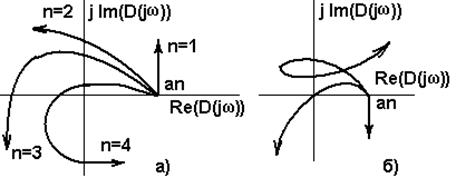
 ε(t),
ε(t),

 .
. = p[(n - m) - m)] - p[(n - g) - g] = 2p(g - m).
= p[(n - m) - m)] - p[(n - g) - g] = 2p(g - m). Рисунок 6.16 – Применение критерия Найквиста для анализа устойчивости
Рисунок 6.16 – Применение критерия Найквиста для анализа устойчивости