
|
|
Дать определение интегрирующего звена. Определить дифференциальное уравнения для звена. Определить передаточную функцию звена. Привести примеры интегрирующего звена.Стр 1 из 3Следующая ⇒ Дать определение интегрирующего звена. Определить дифференциальное уравнения для звена. Определить передаточную функцию звена. Привести примеры интегрирующего звена. Решение. Интегрирующим называется такое звено, в котором выходная величина у пропорциональна интегралу по времени от входной величины X:
где к- коэффициент усиления интегрирующего звена. Можно также дать и другое определение. Интегрирующим называется такое звено, у которого скорость изменения выходной величины пропорциональна входной величине и которая описывается дифференциальным уравнением (первого порядка): dy/dt = кх Интегрирующее звено иногда называют астатическим. Чтобы найти передаточную функцию интегрирующего звена, необходимо дифференциальное уравнение dy/dt = кх записать в операторной форме, заменив при этом d/dt на р. Тогда уравнение в операторной форме будет иметь следующий вид: PY(p)= кх(р), откуда находим передаточную функцию звена: W(p) = к/р. К интегрирующим звеньям можно отнести электрический ДПТ с НВ (при условии что электромеханическая и электромагнитная постоянные времени относительно малы и ими можно пренебречь), конденсатор, заряженный током (входной величиной является ток, а выходной - напряжение на конденсаторе), поршневой гидравлический исполнительный двигатель при пренебрежении массы и силами трения (вход -ной величиной является скорость подачи жидкости в цилиндр, а выходной - перемещение поршня), идеальный дроссель с нулевым активным сопротивлением (входной величиной является напряжение, а входной - ток) и т. д. Практическое задание №2 Дать определение инерционного звена 1-го порядка. Определить дифференциальное уравнения для звена. Определить передаточную функцию звена. Привести примеры интегрирующего звена. Решение. Это такое звено в каком при скачкообразном изменении входной величины х выходная величина у по экспоненциальному закону стремится к новому установившемуся значению. Данное звено имеет свойство накапливать энергию и описывается обыкновенным дифференциальным уравнением первого порядка с постоянными коэффициентами: Tdy/dt +y = к*х Где Т и к- постоянные коэффициенты, которые зависят от принципа действия элемента и его конструкции. Экспонента- это кривая переходных процессов, в которых время, необходимое для того чтобы выходная величина достигла установившегося значения, теоретически бесконечно велико. Заменив d/dt на р, запишем дифференциальное уравнение в операторной форме: Тру(р)+у(р)=к*х(р), W(p) = к/Тр+1 Примерами инерционных звеньев 1-ого порядка является генератор постоянного тока с НВ (входной величиной служит напряжение возбуждения, а выходной — напряжение якоря генератора), термопара (входная величина - термоЭДС), пассивные четырехполюсники, которые состоят из индуктивности и емкости (LC - контур) или из сопротивления и емкости (RC - контур), электродвигатели (вхожая величина- ток якоря, выходная - угловая скорость) и др. Практическое задание №3 Дать определение инерционного звена 2-го порядка. Определить дифференциальное уравнения для звена. Определить передаточную функцию звена. Решение Инерционным звеном второго порядканазывается такое звено, у которого корни характеристического уравнения является вещественными отрицательными (равными или неравными). У этого звена коэффициент затухания 6 > 1. Оно может быть разложено на 2 апериодических звена первого порядка, соединённых последовательно. Уравнение динамики для этого звена можно записать в следующем виде: Т2* d2y/dt2 + 2 где Т - постоянная времени, В зависимости от значения коэффициента затухания, который принимает значения О > Запишем дифференциальное уравнение в операторной форме при нулевых начальных условиях (Т2 p2 +2 откуда передаточная функция звена W(p) = к/T2p2+2 Практическое задание №4 Решение Дифференцирующее звено- звено, в котором выходная величина у пропорциональна скорости изменения входной величины X, т.е. выходная величина пропорциональна производной от входной величины. Различают два вида этих звеньев: идеальное и реальное. Дифференциональное уравнение для идеального дифференцирующего звена записывается в виде: у = к * dx/dt, где dx/dt - скорость изменения входной величины. Запишем уравнение в операторной форме при нулевых начальных условиях: Y(p) = крх(р) Из него найдём передаточную функцию идеального дифференциального звена: W(p) = кр. Примером такого звена могла бы служить CR - цепочка, если бы в ней сопротивление R = 0 и выходное напряжение снималось бы с этого сопротивления. Идеальное дифференцирующее звено практически осуществить невозможно, поэтому в технике применяются реальные дифференцирующие звенья. Последние обладают инерционностью и в них имеются потери энергии. Дифференциальное уравнениедля реального дифференцирующего звена можно записать: T*dy/dt+y=кT*dx/dy где Т и к- постоянные коэффициенты. Заменив в уравнении d/dt на р, получим уравнение в операторной форме при нулевых начальных условиях: (Тр+1)У(р)= кТрХ(р), откуда передаточная функция звена: W(р)=(кTP)/(Tp+1) Примерами реальных дифференцирующих звеньев могут служить трансформатор, CR - контур, где выходной величиной является напряжение, снимаемое с сопротивления R, цепь с активным сопротивлением и индуктивностью, где выходной величиной является напряжение, снимаемое с индуктивности L.
Практическое задание №5 Решение Все критерии устойчивости дают возможность установить следующее: отрицательны ли вещественные части всех корней характеристического уравнения или нет, причём применение того или иного критерия зависит от конкретных условий. В качестве примера алгебраического критерия устойчивости рассмотрим критерий, предложенный в 1876 г. русским учёным И.А. Вышнеградским. Этот критерий разработан для анализа САР, имеющих дифференциальное уравнение третьего порядка:
1. Разделим все члены уравнения на
2. Введём новую переменную:
3. Поставив в формулу вместо r значения q со и сделав преобразования, запишем уравнение в форме Вышнеградского:
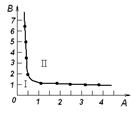
4. Построим плоскость с параметрами А и В и нанесём границу устойчивости. Уравнение границы устойчивости можно записать так АВ = 1 (при А > 0; В > 0). Граница устойчивости, котораяая представляет собой равнобокую гиперболу, строится по точкам. Например, если А = 0.5, то В = АВ/А = 1/0.5 = 2 и т.д. Равнобокая гипербола, для которой А и В является асимптотами, делит плоскость на 2 части: 1 - неустойчивая часть, 2 - устойчивая. Приведённый график называется диаграммой Вышнеградского. Критерий устойчивости Вышнеградского можно формулировать следующим образом -САР, описываемая дифференциальным уравнением третьего порядка, является устойчивой если параметры А и В положительны и произведение их АВ>1;А>0, В>0иАВ>1. Для суждения о степени близости САР к границе устойчивости пользуются запасами устойчивости.
Практическое задание №6 Решение Различают последовательное, параллельное и встречно-параллельное соединение звеньев. При последовательном соединении звеньев выходная величина каждого предыдущего звена является входной величиной для последующего звена. Передаточная функция равна произведению передаточных функций отдельных звеньев.
Параллельное соединение звеньев- это соединение, при котором входная величина является общей для всех звеньев. Передаточная функция равна сумме передаточных функций отдельных звеньев.
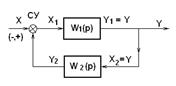
Встречно-параллельное соединение звеньев - в состав которого входит положительная или отрицательная обратная связь. Передаточная функция равна:
где «+» соответствует отрицательной обратной связи, «-»- положительной обратной связи.
Практическое задание №7 Решение Генератор постоянного тока приводится во вращение асинхронным двигателем. Нагрузкой генератора служит электрический двигатель Д. Составим структурную схему. В схеме объектом регулирования ОР является генератор постоянного тока Г, измерительным устройством Из.У- электромагнит 2 и возвратная пружина 4, регулирующим органом РО- реостат 1. Внешние возмущения могут создаваться за счет изменения момента нагрузки на валу двигателя, частоты вращения генератора и т.д. Рассмотрим в отдельности каждый элемент схемы и разобьем элементы на типовые динамические звенья.
1. Объект регулирования (генератор постоянного тока). Входной величиной Г является ток
2. Измерительное устройство (электромагнит с возвратной пружиной). Разбиваем измерительное устройство на две части: электрическую и механическую. Электрическая часть состоит из обмотки электромагнита 2 и реостата настройки 3.. Входной величиной является напряжение генератора U, а выходной ток
Механическая часть состоит из якоря электромагнита 2, скрепленного с движком реостата 1 и пружиной 4. Входной величиной является ток
3. Регулирующий орган (реостат 1). Входной величиной является перемещение S движка реостата 1, а выходной- сопротивление реостата, изменяющее ток возбуждения
Зная структурную схему и передаточные функции, входящих в нее динамических звеньев, функциональную схему системы можно представить в следующем виде:
Практическое задание №8 Изобразить схему преобразователя напряжения в код (АЦП). Описать принцип функционирования схемы. Решение
Они предназначены для преобразования аналоговой величины в цифровой код. По принципу получения кода АЦП можно разделить на два типа: ступенчатого и разрядного кодирования. В ступенчатых АЦП код изменяется до требуемого значения ступеньками, поэтому их быстродействие ниже быстродействия АЦП разрядного кодирования. Под быстродействием здесь понимается время, которое требуется затратить на преобразование одной выборки входного сигнала в код. В АЦП ступенчатого типа для кодирования используется счетчик, который суммирует счетные импульсы. На вход схемы преобразователя напряжения в код ступенчатого типа подается напряжение UBX, которое с помощью времяимпульсного преобразователя ВИП преобразуется в электрический импульс. Длительность этого импульса прямо пропорциональна входному напряжению UBx- В период tM действия импульса открыта схема совпадения и на вход двоичного счетчика поступают импульсы стабильной частоты от генератора импульсов ГИ. Состояние каждого триггера счетчика соответствует разряду двоичного числа (2°, 21,..., Практическое задание №9 Решение Реостатные и потенциометрические датчики служат для преобразования углового или линейного перемещения в электрический сигнал. Преобразователи активного сопротивления представляют собой резистор переменного сопротивления. В электрическую цепь резистор может включаться по схеме реостата, такие преобразователи называются реостатными.
В электрическую цепь резистор может включаться по схеме потенциометра, такие преобразователи называются потенциометрическими.
Рассмотрим статическую характеристику преобразования активного сопротивления, когда за вход принято перемещение l движка реостата, а за выход- значение r его активного сопротивления в электрической цепи. При полном перемещении движка l=lmax сопротивление равно полному сопротивлению R резистора. С учетом этого статическая характеристика r=kl, где k=R/lmax - передаточный коэффициент. Подставляя k в (1) и обозначив r= Это выражение применяется в технике для определения степени введения в электрическую цепь переменного резистора.
Практическое задание №10 Решение Двоичные коды в аналоговые эквиваленты преобразуются различным способом, но все они основаны на сложении аналоговых составляющих, пропорциональных некоторым двоичным приращениям (элементам) исходного двоичного числа. Преобразователи кода в угол поворота часто называют цифровыми следящими системами. Схема работает следующим образом. На сумматор цифровой следящей системы поступают по двум каналам параллельные коды. Один код поступает от задающего устройства — ЭВМ, а второй — от преобразователя «вал — код». В сумматоре происходит вычитание этих кодов. Разность кодов поступает на преобразователь кода в напряжение ПКН, а с его выхода — на вход усилителя У следящей системы. Усиленный сигнал передается на управляющую обмотку исполнительного двигателя следящей системы. Двигатель поворачивает датчик Д на угол, пропорциональный выходному коду сумматора. Двигатель Дв поворачивается до тех пор, пока разность на выходе сумматора не будет равна нулю. В этом случае угол поворота двигателя или датчика будет с определенной точностью соответствовать входному двоичному коду.
Дать определение интегрирующего звена. Определить дифференциальное уравнения для звена. Определить передаточную функцию звена. Привести примеры интегрирующего звена. Решение. Интегрирующим называется такое звено, в котором выходная величина у пропорциональна интегралу по времени от входной величины X:
где к- коэффициент усиления интегрирующего звена. Можно также дать и другое определение. Интегрирующим называется такое звено, у которого скорость изменения выходной величины пропорциональна входной величине и которая описывается дифференциальным уравнением (первого порядка): dy/dt = кх Интегрирующее звено иногда называют астатическим. Чтобы найти передаточную функцию интегрирующего звена, необходимо дифференциальное уравнение dy/dt = кх записать в операторной форме, заменив при этом d/dt на р. Тогда уравнение в операторной форме будет иметь следующий вид: PY(p)= кх(р), откуда находим передаточную функцию звена: W(p) = к/р. К интегрирующим звеньям можно отнести электрический ДПТ с НВ (при условии что электромеханическая и электромагнитная постоянные времени относительно малы и ими можно пренебречь), конденсатор, заряженный током (входной величиной является ток, а выходной - напряжение на конденсаторе), поршневой гидравлический исполнительный двигатель при пренебрежении массы и силами трения (вход -ной величиной является скорость подачи жидкости в цилиндр, а выходной - перемещение поршня), идеальный дроссель с нулевым активным сопротивлением (входной величиной является напряжение, а входной - ток) и т. д. Практическое задание №2   Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 Т* dy/dt + у = кх
Т* dy/dt + у = кх
 :
:
 , где
, где 
 , где
, где 






 в цепи обмотки возбуждения ОВ2, а выходной-напряжение U, снимаемое с зажимов генератора. Генератор для данной схемы представляет собой апериодическое звено, передаточную функцию которого можно записать:
в цепи обмотки возбуждения ОВ2, а выходной-напряжение U, снимаемое с зажимов генератора. Генератор для данной схемы представляет собой апериодическое звено, передаточную функцию которого можно записать:
 , проходящий по цепи обмотки электромагнита 2. Электрическая часть представляет собой апериодическое звено, передаточную функцию которого можно записать:
, проходящий по цепи обмотки электромагнита 2. Электрическая часть представляет собой апериодическое звено, передаточную функцию которого можно записать:




 ). При поступлении на вход счетчика определенного числа N импульсов за время tH триггеры счетчика принимают определенные состояния, характеризующие двоичное число, пропорциональное входному напряжению. Описанным способом формируется двоичный код, числовое значение которого пропорционально входному напряжению
). При поступлении на вход счетчика определенного числа N импульсов за время tH триггеры счетчика принимают определенные состояния, характеризующие двоичное число, пропорциональное входному напряжению. Описанным способом формируется двоичный код, числовое значение которого пропорционально входному напряжению

 перемещение движка реостата в относительных единицах l/lmax, получаем
перемещение движка реостата в относительных единицах l/lmax, получаем

