|
|
Пропорциональный закон регулировки. ⇐ ПредыдущаяСтр 6 из 6 Наиболее простым и широко распространенным является такой закон регулирования, при котором выходной сигнал регулятора z линейно зависит от входного Δx: z = z0+ кΔх, где к —коэффициентпропорциональности, называемыйкоэффициентомпередачи регулятора, а zо—постоянная составляющая сигнала z. Как видно из формулы, Z0—этотакоезначениевыходного сигнала регулятора, при котором рассогласование Δx на его входе равно нулю. Закон регулирования, выраженный формулой, называется пропорциональным. Сокращенно говорят, что это П-закон регулирования, а сам регулятор с таким законом регулирования называют пропорциональным или П-регулятором. Этот закон действует, например, при регулировании уровня в емкости где регулирующее воздействие —степень открытия клапана — пропорционально перемещению поплавка, т. е. отклонению уровня в емкости от его задания.
№55 Интегральный закон регулирования формируют интегральные (или астатические) регуляторы. Величина регулирующего воздействия этих регуляторов пропорциональна интегралу отклонения регулируемого параметра от заданного значения по времени:
Отличительной особенностью интегрального регулятора является то, что он всегда приводит регулируемый параметр к заданному значению без статической ошибки, так как равновесие в системе регулирования может быть достигнуто только при х=0. В динамическом отношении данный регулятор подобен интегрирующему звену. У него сдвиг фаз между сигналами на входе и на выходе равен
№56 Пропорционально-интегральный закон регулирования описывается уравнением: Формирует этот закон ПИ-регулятор (или изодромный). Он имеет два параметра настройки kp и Ти, влияющие, соответственно, на характеристики регулятора. Его передаточную функцию определяют по формуле: Амплитудно-фазовая характеристика описывается уравнением:
Таким образом угол сдвига фаз ПИ-регулятора находится в пределах от 0 до - p/2.
№57 Пропорционально – интегрально –дифференциальныйзаконрегулирования реализуетсяввидеуравнения: У формирующих этот закон ПИД – регуляторов величина регулирующего воздействия пропорциональна отклонению регулируемого параметра от заданного значения, интегралу и скорости этого отклонения. Характеристика регулятора представлена на рисунке 1. При скачкообразном изменении регулируемой величины идеальный ПИД–регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на регулирующий орган; затем величина воздействия падает до значения, определяемого пропорциональной частью регулятора, после чего, как и в ПИ-регуляторе, постепенно начинает оказывать своё влияние интегральная составляющая регулятора. Передаточная функция регулятора имеет вид: При Тдстремящийся к 0 ПИД–регуляторпереходитвПИ–регулятор. ПриТистремящийсякбесконечностиПИД–регуляторпереходитвПД–регулятор.
№ 58Позиционныйрегулятор –этоустройство, вкоторомпридостиженииопределённогозначениявходнойвеличинывыходнаявеличинаизменяетсяскачком и принимает конечное число фиксированных значений. В теоретическом плане ПЗ –регуляторыможнопредставитькакидеальныеиреальные.В зависимости от типа технологического процесса регуляторы данного типа могут классифицироваться как регуляторы типов «откр-закр» и «вкл-выкл». Эти регуляторы характеризуются тем, что их регулирующий орган при непрерывном изменении регулируемой величины сам перемещается лишь с перерывами, через некоторые промежутки времени. Различают два основных вида регулирования: позиционное и шаговое. Для регуляторов прерывистого действия характерно периодическое нарушение связи между какими-либо частями, и перестановка регулирующего органа производится через некоторые промежутки времени, определяемые состоянием САР и настройкой регулятора. Как пример регулятора прерывистого действия можно рассматривать многопозиционный регулятор, который производит ступенчатую перестановку регулирующего органа в результате временного разрыва связи между регулирующим устройством и исполнительным механизмом. Частным случаем многопозиционного является двухпозиционный регулятор, регулирующий орган которого может занимать только два крайних положения.
№59 Регуляторы прямого действия относят к автоматическим регуляторам, у которых при изменении значения регулируемого параметра перемещение регулирующего элемента происходит только за счет усилий, возникающих, как правило, в измерительном элементе. Регуляторы прямого действия служат для поддержания постоянного давления в трубопроводе, эта необходимость может возникнуть в реальных рабочих условиях, когда в нём происходят колебания давления рабочей среды, недопустимые для нормальной работы технологической системы или установки. Регулятор прямого действия срабатывает непосредственно от среды в контролируемом участке трубопровода без использования посторонних источников энергии. Принцип работы: Предположим, что заданному номинальному давлению в трубопроводе соответствует установившийся поток среды через регулятор, при этом усилие от давления среды на чувствительном элементе компенсируется задатчикомнагружения (пружиной или грузом), то есть система находится в равновесии. При изменении давления в трубопроводе это равновесие нарушается и затвор арматуры перемещается, преодолевая усилие от задатчика, или наоборот, поддаваясь ему, при этом изменятся степень открытия регулирующего органа, а следовательно и расхода среды. С изменением расхода меняется давление и, при достижении исходного его значения, система снова приходит в равновесие и затвор прекращает двигаться.
№ 60 Выбор типа регулятора. При расчете АСР проверяют возможность использования наиболее простого закона регулирования, каждый раз оценивая качество регулирования, и если оно не удовлетворяет требованиям, переходят к более сложным законам. Основными исходными данными для выбора регулятора являются характеристики объекта регулирования и требуемое качество регулирования. Для выбора регулятора необходимо знать: 1) статические и динамические параметры объекта - коэффициент передачи объекта Коб; чистое запаздывание tоб; постоянную времени Тоб; (если Коб меняется в пределах эксплуатационных режимов агрегата, то следует брать его максимальное значение); 2) максимально возможное значение возмущения DXвх. max, выраженное в процентах хода регулирующего органа (% ХРО); 3) допустимое динамическое отклонение y1; 4) допустимое перерегулирование h; 5) допустимую статическую ошибку yст; 6) допустимое время регулирования tр. Требуемое качество регулирования зависит от условий протекания технологического процесса и работы агрегата. В каждом конкретном случае выявляются наиболее существенные показатели качества регулирования, соблюдение которых обеспечивает рациональное функционирование производственного процесса. В некоторых случаях решающее значение имеет максимальное динамическое отклонение параметра, в других - интегральный показатель или время регулирования.Выбор типа регулятора производится с учетом характеристик объекта и требуемого качества регулирования. В частности, пропорциональный или П-регулятор можно применять при работе как на устойчивых (статических), так и на нейтральных объектах, если допустима статическая ошибка регулирования.
№61 Исполни́тельноеустро́йство - устройствосистемыавтоматическогоуправленияилирегулирования, воздействующеенапроцессв соответствии с получаемой командной информацией.Под исполнительным устройством втеорииавтоматическогоуправленияпонимаютустройство, передающеевоздействиесуправляющегоустройстванаобъектуправления. Иногдарассматривается в качестве составной части объекта управления. Управляющим устройством может быть любая динамическая система. Входные и выходные сигналы исполнительных устройств, а также их методы воздействия на объект управления могут иметь различную природу. В технике, исполнительные устройства представляют собой преобразователи, превращающие входной сигнал в выходной сигнал (обычно в движение), воздействующий на объект управления. Устройства такого типа включают: электрические двигатели, электрические, пневматические или гидравлические приводы, релейные устройства, электростатические двигатели, хватающие механизмы роботов. Виртуальные (программные) приборы используют исполнительные устройства и датчики для взаимодействия с объектами реального мира. С помощью датчиков сигнал передаётся в виртуальный прибор, обрабатывается и выдаётся в реальный мир с помощью различного вида исполнительных устройств.
№62 Исполнительный механизм —любоймеханизмосуществляющийвоздействие на технологический объект управления (ТОУ) по сигналу от системы управления (ПЛК, регулятор).Типичными исполнительными механизмами являются: Задвижка, Регулирующий клапан регулятора, Насос, Шаговый электродвигатель, Теплонагревательный электрический элемент (ТЭН), Соленоид, Пневмоотсечная арматура. Исполнительный механизм (ИМ) предназначен для перемещения регулирующего органа под воздействием сигнала от управляющего устройства. По виду потребляемой энергии ИМ подразделяются: - электрические;- пневматические;- гидравлические. Наиболее часто применяются электрические и пневматические ИМ.Электрические ИМ по принципу действия подразделяются на электромагнитные и электродвигательные. Возможные отказы в работе электромагнитных ИМ связаны с изменением сопротивления изоляции электрических цепей и катушек, нарушением регулировки блокировочных контактов, неисправностью выпрямителя, изменением напряжениясрабатывания и отпускания электромагнитов, неисправностью механической части, что приводит к увеличению тока срабатывания и выходу из строя катушек.В качестве исполнительных механизмов в пневматических системах применяются поршневые и мембранные пневмоприводы. Поршневые отличаются от мембранных большей величиной перемещения рабочего органа и большим развиваемым усилием. Применяются они редко.Мембранно-пружинные исполнительные механизмы в зависимости от направления движения выходного звена подразделяются на ИМ прямого и обратного действия. №63 Регулирующий орган представляет собой звено исполнительного устройства, предназначенное для изменения каких-либо параметров (например, расхода жидкости) при регулировании режима работы объекта. Наибольшее распространение получили дроссельные регулирующие органы —клапаныизаслонки. При двухпозиционном регулировании (открыто-закрыто) затвор регулирующего органа быстро перемещается в одно из крайних положений. В этом случае регулирование параметра рабочей среды осуществляется за счет соотношения между промежутками времени, когда регулирующий орган закрыт или открыт. При непрерывном регулировании пропускная способность регулирующего органа определяется степенью его открытия. Регулирующие органы характеризуются многими параметрами, основными из которых являются: максимально допустимое давление на входе в РО, минимальный расход среды, перепад давления на РО, расход через полностью открытый клапан. Подбор РО осуществляется по перечисленным параметрам.
№64Вспомогательная аппаратура. Необходимость в дополнительных устройствах автоматики существует даже в системах с мощными контроллерами (например, релейные блоки для управления исполнительными механизмами), тем более необходимо использование дополнительных приборов в простейших системах регулирования. Потенциометр —задатчикзначенийрегулируемойвеличины, подключаетсякрегулятору. Мультиплексор —коммутаторканаловподключениякконтроллеру, расширяющийеговозможности. Конвертор —прибордляадаптацииэлектроприводовсдискретнымуправлениемканалоговомусигналуконтроллеру. Релейный блок —предназначендлягальваническойразвязкиэлектроцепейуправленияотсиловогоэлектроцепей. Гистерезисный блок и блок задержки срабатывания —служатдлярегулированияпериодазапаздывания, чтопозволяетизбежатьпреждевременногосрабатыванияисполнительныхустройств. Контроллер, препятствующий размораживанию теплообменников —представляетсобойустройствосжесткозаданной программой зашиты от замораживания. Пульт оператора —сегопомощьюможнопросмотретьиизменитьнекоторыепараметрыконтроллера. Источник питания —понижающийтрансформаторилиадаптер (спеременногонапостоянныйток) дляаппаратурысистемы автоматического регулирования. Термоконтактное реле —автоматическипрерываетподачунапряженияприперегреведвигателя. Такие реле могут быть подключены к сетевому напряжению, двигателю или термоконтактным проводам. Существуют модели отдельно стоящего термоконтактного реле или устанавливаемого на контрольной панели. Реле имеют небольшие размеры, их габариты не превышают 70-150 мм.
№65 Логические элементы —устройства, предназначенныедляобработкиинформациивцифровойформе. Логический элемент –этотакаясхемка, укоторойнескольковходовиодинвыход. Каждомусостояниюсигналовнавходах, соответствуетопределенныйсигналнавыходе. Элемент «И» (AND) Иначе его называют «конъюнктор».
Элемент «ИЛИ» (OR) По другому, его зовут «дизъюнктор».
Элемент «НЕ» (NOT) Чаще, его называют «инвертор».
Элемент «И-НЕ» (NAND)
Элемент «ИЛИ-НЕ» (NOR) Та же история –элемент«ИЛИ»синверторомнавыходе.
«Исключающее ИЛИ» (XOR)
Смотрим таблицу истинности. Когда на выходе единицы? Правильно: когда на входах разные сигналы. На одном – 1, надругом– 0.
№66 Аналого-цифровые преобразователи (АЦП) являются устройствами, которые принимают входные аналоговые сигналы и генерируют соответствующие им цифровые сигналы, пригодные для обработки микропроцессорами и другими цифровыми устройствами.Процедура аналого-цифрового преобразования непрерывных сигналов, которую реализуют с помощью АЦП, представляет собой преобразование непрерывной функции времени U(t), описывающей исходный сигнал, в последовательность чисел {U'(tj)}, j=0,1,2,:, отнесенных к некоторым фиксированным моментам времени. Эту процедуру можно разделить на две самостоятельные операции. Первая из них называется дискретизацией и состоит в преобразовании непрерывной функции времени U(t) в непрерывную последовательность {U(tj)}. Вторая называется квантованием и состоит в преобразовании непрерывной последовательности в дискретную {U'(tj)}. В основе дискретизации непрерывных сигналов лежит принципиальная возможность представления их в виде взвешенных сумм:
№67 Цифро-аналоговый преобразователь (ЦАП) предназначен для преобразования числа, определенного, как правило, в виде двоичного кода, в напряжение или ток, пропорциональные значению цифрового кода. Схемотехника цифро-аналоговых преобразователей весьма разнообразна. На рис. 1 представлена классификационная схема ЦАП по схемотехническим признакам. Кроме этого, ИМС цифро-аналоговых преобразователей классифицируются по следующим признакам: По виду выходного сигнала: с токовым выходом и выходом в виде напряжения По типу цифрового интерфейса: с последовательным вводом и с параллельным вводом входного кода По числу ЦАП на кристалле: одноканальные и многоканальные По быстродействию: умеренного и высокого быстродействия
№68 Операционный усилитель —усилительпостоянноготокасдифференциальнымвходоми, какправило, единственнымвыходом, имеющийвысокийкоэффициентусиления. ОУпочтивсегдаиспользуютсявсхемахсглубокойотрицательнойобратнойсвязью, которая, благодарявысокому коэффициенту усиления ОУ, полностью определяет коэффициент передачи полученной схемы. В настоящее время ОУ получили широкое применение как в виде отдельных чипов, так и в виде функциональных блоков в составе более сложных интегральных схем. Такая популярность обусловлена тем, что ОУ является универсальным блоком с характеристиками, близкими к идеальным, на основе которого можно построить множество различных электронных узлов.
V+: неинвертирующий вход, V−: инвертирующийвход, Vout: выход VS+: плюс источника питания, VS−: минусисточникапитания. Указанные пять выводов присутствуют в любом ОУ, они необходимы для его функционирования. Однако, существуют операционные усилители, не имеющие неинвертиующего входа. Идеальный ОУ является физической абстракцией, то есть не может реально существовать, однако позволяет существенно упростить рассмотрение работы схем на ОУ благодаря использованию простых математических моделей.
№ 69 Программи́руемыйлоги́ческийконтро́ллер (ПЛК) илипрограммируемыйконтроллер—электроннаясоставляющая промышленного контроллера, специализированного (компьютеризированного) устройства, используемого для автоматизации технологических процессов. В качестве основного режима длительной работы ПЛК, зачастую в неблагоприятных условиях окружающей среды, выступает его автономное использование, без серьёзного обслуживания и практически без вмешательства человека.ПЛК являются устройствами реального времени. В системах управления технологическими объектами логические команды преобладают над числовыми операциями, что позволяет при сравнительной простоте микроконтроллера (шины шириной 8 или 16 бит), получить мощные системы действующие в режиме реального времени. В современных ПЛК числовые операции реализуются наравне с логическими. В то же время, в отличие от большинства процессоров компьютеров, в ПЛК обеспечивается доступ к отдельным битам памяти.
№70 Типы ПЛК. Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:нано-ПЛК (менее 16 каналов);микро-ПЛК (более 16, до 100 каналов);средние (более 100, до 500 каналов); большие (более 500 каналов). По расположению модулей ввода-вывода ПЛК бывают: моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля. Часто перечисленные конструктивные типы контроллеров комбинируются, например, моноблочный контроллер может иметь несколько съемных плат; моноблочный и модульный контроллеры могут быть дополнены удаленными модулями ввода-вывода, чтобы увеличить общее количество каналов. По конструктивному исполнению и способу крепления контроллеры делятся на:панельные (для монтажа на панель или дверцу шкафа);для монтажа на DIN-рейку внутри шкафа; для крепления на стене;стоечные - для монтажа в стойке; бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования По области применения контроллеры делятся на следующие типы: универсальные общепромышленные;для управления роботами; для управления позиционированием и перемещением;коммуникационные;ПИД-контроллеры;специализированные. По способу программирования контроллеры бывают: программируемые с лицевой панели контроллера;программируемые переносным программатором; программируемые с помощью дисплея, мыши и клавиатуры; программируемые с помощью персонального компьютера.
Архитектурой контроллера называют набор его основных компонентов и связей между ними. Типовой состав ПЛК включает центральный процессор, память, сетевые интерфейсы и устройства ввода-вывода. Иногда эта конфигурация дополняется устройством для программирования и пультом оператора, устройствами индикации, реже - принтером, клавиатурой, мышью или трекболом. Процессорный модуль включает в себя микропроцессор (центральное процессорное устройство - ЦПУ), запоминающие устройства, часы реального времени и сторожевой таймер. Емкость памяти определяет количество переменных (тегов), которые могут быть обработаны в процессе функционирования ПЛК. В микропроцессорах время доступа к памяти является одним из существенных факторов, ограничивающих быстродействие.
№ 71 Назначение цели и задачи АСУТП. АСУТП предназначена для: - Целевого применения как законченное изделие под определенный объект автоматизации; - Стабилизации заданных режимов технологического процесса путем измерения значений технологических параметров, их обработки, визуального представления, и выдачи управляющих воздействий в режиме реального времени на исполнительные механизмы, как в автоматическом режиме, так и в результате действий технолога-оператора; - Анализа состояния технологического процесса, выявление предаварийных ситуаций и предотвращение аварий путем переключения технологических узлов в безопасное состояние, как в автоматическом режиме, так и по инициативе оперативного персонала; - Обеспечения административно-технического персонала завода необходимой информацией с технологического процесса для решения задач контроля, учета, анализа, планирования и управления производственной деятельностью. Целями создания АСУТП являются: - Обеспечение надежной и безаварийной работы производства; - Стабилизация эксплуатационных показателей технологического оборудования и режимных параметров технологического процесса; - Увеличение выхода товарной продукции; - Уменьшение материальных и энергетических затрат; - Снижение непроизводительных потерь человеческих, материально - технических и топливно-энергетических ресурсов, сокращение эксплуатационных расходов; - Выбор рациональных технологических режимов с учетом показаний промышленных анализаторов, установленных на потоках, и оперативной корректировки стратегии управления по данным лабораторных анализов; - Улучшение качественных показателей конечной продукции; - Предотвращение аварийных ситуаций; - Автоматическая и автоматизированная диагностика оборудования АСУТП. № 72-73 (походу одно и то же)Состав АСУТП. Архитектура управляющего вычислительного комплекса. Автоматизированные системы управления технологическими процессами строятся по многоуровневой схеме. Первый (нижний) уровень составляют датчики и исполнительные механизмы. К ним относятся не только простейшие преобразователи физических величин в электрические сигналы, но и довольно сложные устройства, обрабатывающие по собственным алгоритмам как входные сигналы, так и выходные команды. Второй уровень формируют программируемые контроллеры, включая загруженные в них программы сбора и обработки данных, а также удаленные модули ввода-вывода. Современная контроллерная техника позволяет максимально приблизить устройства сбора информации и выдачи команд к объектам первого уровня системы, что позволяет повысить надежность системы и сэкономить кабельные комплектующие. Третьим и последующими уровнями являются автоматизированные рабочие места (АРМ) местного, районного и т.д. уровней управления. Они могут включать в себя: - вычислительные комплексы обработки данных; - средства отображения (многомониторные дисплейные системы, экранные табло, мнемосхемы и т. п.); - коммуникационные средства (модемы, мосты, преобразователи и т. п.); - источники бесперебойного питания; - программное обеспечение; - серверы хранения архивов.
№74Устройство сопряжения с объектом (УСО). УСО представляют собой наборы агрегатных модулей сбора, коммутации и преобразования сигналов контроля и выдачи сигналов управления на объектах, оснащенных датчиками, системами местной (локальной) автоматизации и исполнительными механизмами. Агрегатность позволяет легко наращивать количество каналов и типов функций, благодаря чему УСО можно оптимально согласовывать с требованиями конкретных систем. По типу сигналов, вызываемых датчиками, УСО делят на подсистемы, состоящие из модулей ввода-вывода аналоговых сигналов и на подсистемы, состоящие из модулей ввода вывода дискретных сигналов. Модули аналогового ввода-вывода могут выполнять следующие функции: - Подключения. Сигналы с датчиков передаются на аналоговые входы по одиночным или парам проводов. Сигнальные провода должны оканчиваться в точке сопряжения с аналоговой подсистемой. Устройствами подключения, предназначенными для этой цели, могут служить клеммные колодки, кабельные разъемы и т.д.; - Нормализация сигнала, т.е. модификация сигнала (фильтрация, ослабление, смещение уровня, линейная или нелинейная компенсация, преобразование тока в напряжение (усиление исключается)). - Усиление сигнала. Осуществляется с помощью усилителей трех типов: а) усилители сигналов низкого уровня, коэффициент усиления которых может быть 1001000; б) буферный усилитель, имеющий высокое входное и низкое выходное сопротивление, коэффициент усиления 1 или 2; в) усилитель слежения-запоминания, его выход пропорционален входу до тех пор, пока не последует команда запоминания, после чего выходной сигнал остается неизменным до конца действия команды. -Коммутации, коммутатор состоит из электронного или электромеханического переключателя, последовательно подключающего каждый отдельный вход или выход к ТП. Коммутация осуществляется до или после усиления. Коммутаторы различают по уровням сигналов, быстродействию и числу направлений коммутации. - Аналого-цифровое (или цифро-аналоговое) преобразование, которое осуществляется с помощью преобразователей АЦП. Основные характеристики АЦП: время преобразования и длина разрядной сетки. На рис.1. приведена схема УСО при вводе аналоговых сигналов.
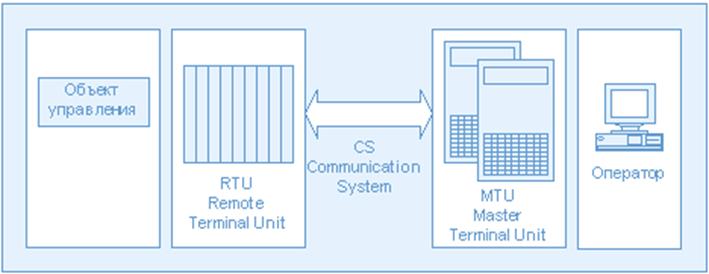
На рис.1приведена блок-схема цифрового ввода. Модули дискретного ввода вывода также как и аналоговые выполняют функции подключения, нормализации, усиления и коммутации. Кроме того, они способны подсчитывать число импульсов, поступающих с датчиков за определенный промежуток времени, или "расширять" импульсы до заданной величины. На вход модулей ввода-вывода дискретных сигналов могут поступать: - инициативные, т.е. уровневые сигналы, которые вырабатывает датчик, если его состояние изменяется из 0 в 1 (или из 1 в 0). - Дискретные сигналы, т.е. импульсные сигналы различной частоты следования и различной длительности. - Сигналы с датчиков типа "сухой контакт". №75 Определение и общая структура SCADA SCADA процесс сбора информации реального времени с удаленных точек (объектов) для обработки, анализа и возможного управления удаленными объектами. Требование обработки реального времени обусловлено необходимостью доставки (выдачи) всех необходимых событий (сообщений) и данных на центральный интерфейс оператора (диспетчера). В то же время понятие реального времени отличается для различных SCADA-систем.Все современные SCADA-системы включают три основных структурных компонента (см. рис. 2): RemoteTerminalUnit (RTU) удаленный терминал, осуществляющий обработку задачи (управление) в режиме реального времени. Спектр его воплощений широк от примитивных датчиков, осуществляющих съем информации с объекта, до специализированных многопроцессорных отказоустойчивых вычислительных комплексов, осуществляющих обработку информации и управление в режиме жесткого реального времени.
Рис. 2. Основные структурные компоненты SCADA-системы
MasterTerminalUnit (MTU), MasterStation (MS) диспетчерский пункт управления (главный терминал); осуществляет обработку данных и управление высокого уровня, как правило, в режиме мягкого (квази-) реального времени; одна из основных функций обеспечение интерфейса между человеком-оператором и системой (HMI, MMI). В зависимости от конкретной системы MTU может быть реализован в самом разнообразном виде от одиночного компьютера с дополнительными устройствами подключения к каналам связи до больших вычислительных систем (мэйнфреймов) и/или объединенных в локальную сеть рабочих станций и серверов. Как правило, и при построении MTU используются различные методы повышения надежности и безопасности работы системы. CommunicationSystem (CS) коммуникационная система (каналы связи), необходима для передачи данных с удаленных точек (объектов, терминалов) на центральный интерфейс оператора-диспетчера и передачи сигналов управления на RTU (или удаленный объект в зависимости от конкретного исполнения системы).
  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 где Т и –постояннаяинтегрирования, с.
где Т и –постояннаяинтегрирования, с. т.е. прохождение сигнала через интегральный регулятор при всех частотах будет запаздывать по отношению к входному воздействию на
т.е. прохождение сигнала через интегральный регулятор при всех частотах будет запаздывать по отношению к входному воздействию на  где kp - коэффициент пропорциональности; Т и -постоянная интегрирования, с.
где kp - коэффициент пропорциональности; Т и -постоянная интегрирования, с.
 . При Тистремящийся к бесконечности ПИ-регулятор превращается в П-регулятор, для которого j =0. При kpстремящийся к 0 ПИ-регулятор переходит в И-регулятор, для которого j = - p /2.
. При Тистремящийся к бесконечности ПИ-регулятор превращается в П-регулятор, для которого j =0. При kpстремящийся к 0 ПИ-регулятор переходит в И-регулятор, для которого j = - p /2. Рисунок 2 - Переходные процессы в системе с ПИ-регулятором
Рисунок 2 - Переходные процессы в системе с ПИ-регулятором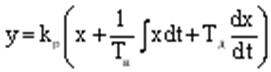 где Тд - постоянная дифференцирования, с.
где Тд - постоянная дифференцирования, с.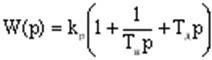 / Амплитудно-фазовую характеристику определяют по формуле:
/ Амплитудно-фазовую характеристику определяют по формуле: 
 Рисунок 2 - Переходные процессы в системе: 1 - с П–регулятором; 2 - сПИ - регулятором; 3 - сПИД–регулятором
Рисунок 2 - Переходные процессы в системе: 1 - с П–регулятором; 2 - сПИ - регулятором; 3 - сПИД–регулятором Исполнительное устройство в контуре простейшей следящей системы: сигнал рассогласования ε (разностьзадающегосигнала r и сигнала обратной связи u) с помощью управляющего устройства преобразуется в сигнал управления v, который передаётся на объект управления.
Исполнительное устройство в контуре простейшей следящей системы: сигнал рассогласования ε (разностьзадающегосигнала r и сигнала обратной связи u) с помощью управляющего устройства преобразуется в сигнал управления v, который передаётся на объект управления. Единица на выходе элемента «И» возникает только тогда, когда на оба входа поданы единицы. Это объясняет название элемента: единицы должны быть И на одном, И на другом входе.
Единица на выходе элемента «И» возникает только тогда, когда на оба входа поданы единицы. Это объясняет название элемента: единицы должны быть И на одном, И на другом входе.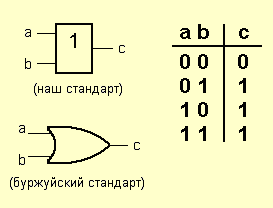 На выходе возникает единица, когда на один ИЛИ на другой ИЛИ на оба сразу входа подана единица. Этот элемент можно назвать также элементом «И» для негативной логики: ноль на его выходе бывает только в том случае, если и на один и на второй вход поданы нули.
На выходе возникает единица, когда на один ИЛИ на другой ИЛИ на оба сразу входа подана единица. Этот элемент можно назвать также элементом «И» для негативной логики: ноль на его выходе бывает только в том случае, если и на один и на второй вход поданы нули.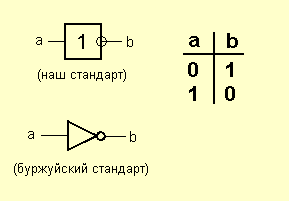
 Элемент И-НЕ работает точно так же как «И», только выходной сигнал полностью противоположен. Там где у элемента «И» на выходе должен быть «0», у элемента «И-НЕ» - единица. И наоборот. Э то легко понять по эквивалентной схеме элемента:
Элемент И-НЕ работает точно так же как «И», только выходной сигнал полностью противоположен. Там где у элемента «И» на выходе должен быть «0», у элемента «И-НЕ» - единица. И наоборот. Э то легко понять по эквивалентной схеме элемента: 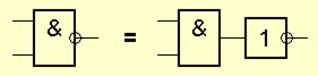
 Элемент
Элемент Операция, которую он выполняет, часто называют «сложение по модулю 2». На самом деле, на этих элементах строятся цифровые сумматоры.
Операция, которую он выполняет, часто называют «сложение по модулю 2». На самом деле, на этих элементах строятся цифровые сумматоры. где aj - некоторые коэффициенты или отсчеты, характеризующие исходный сигнал в дискретные моменты времени; fj(t) - набор элементарных функций, используемых при восстановлении сигнала по его отсчетам.
где aj - некоторые коэффициенты или отсчеты, характеризующие исходный сигнал в дискретные моменты времени; fj(t) - набор элементарных функций, используемых при восстановлении сигнала по его отсчетам.
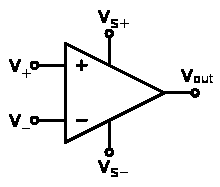 На рисунке показано схематичное изображение операционного усилителя. Выводы имеют следующее значение:
На рисунке показано схематичное изображение операционного усилителя. Выводы имеют следующее значение: