|
|
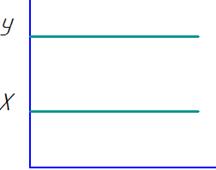
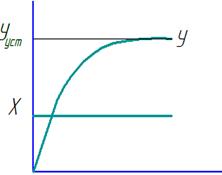
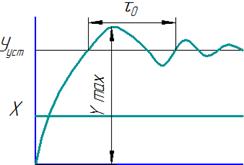
Стабилизирующая, программная, следящая АСР.В стабилизирующих АСР задание является постоянной величиной. В программных АСР задание изменяется по определенному, заранее заданному закону, а в следящих АСР —произвольно. Примером стабилизирующей АСР является система стабилизации уровня в емкости, когда заданное значение уровня Следует помнить, что сама стабилизация технологическогопараметра, как цель регулирования в АСР, предполагает любое изменение задания. Переходные характеристики линейных элементов. Режим, когда входные и выходные величины меняются с течением времени называется динамическим, а показатели, его характеризующие,— динамическими. Процесс, протекающий в элементе при изменении еговходной величины, называется переходным.Изменение выходной величины элемента с течением времени называется динамической характеристикой элемента, зависящей от его свойств и характера изменения его входной величины. При скачкообразном изменении входного сигнала хвх характеристика y = f(t) называется графиком переходного процесса элемента. На рис. 2.3 показаны различные графики переходных процессов. Элемент, динамическая характеристика которого представлена на рис. 2.3 а не обладает инерционностью, так как его выходной сигнал изменяется одновременно с входным сигналом без запаздывания. Элемент, динамическая характеристика которого приведена на рис. 2.3 б обладает инерционностью, т.к его выходная величина возрастает постепенно. Степень инерционности определяется постоянной времени Т элемента, которая представляет собой один из основных динамических его показателей. Если динамическая характеристика элемента носит колебательно-затухающий характер (рис. 2.3в), то его выходная величина у колеблется около установившегося значения ууст с постоянной частотой f0 = l/Tо и непрерывно убывающей амплитудой (Tо —периодколебаний).
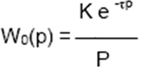
Передаточная функция Преобразование дифференциальных уравнений по Лапласу дает возможность ввести удобное понятие передаточной функции, характеризующей динамическиесвойствасистемы. Передаточной функцией называется отношение изображения выходноговоздействия Y(р) к изображению входного X(р) при нулевых начальных условиях Так как передаточная функция системы полностью определяет ее динамические свойства, то первоначальная задача расчетаСАР сводится к определению ее передаточной функции. При расчете настроек регуляторов широко используются достаточно простые динамические моделипромышленныхобьектовуправления. В частности, использование моделей инерционных звеньев первого или второго порядка с запаздыванием для расчета настроек регуляторов обеспечивает в большинстве случаев качественную работу реальной системы управления. В зависимости от вида переходной характеристики (кривой разгона) задаются чаще всего одним из трех видов передаточной функции объекта управления: 1. В виде передаточной функции инерционного звена первого порядка:
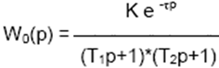
2. Для объекта управления без самовыравнивания передаточная функция имеет вид: 3. Более точно динамику объекта описывает модель второго порядка с запаздыванием:   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 . Из формулы следует, что изображение выходногосигнала можно найти как
. Из формулы следует, что изображение выходногосигнала можно найти как  .
.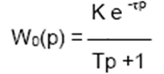 где: К - коэффициент усиления, Т - постоянная времени,
где: К - коэффициент усиления, Т - постоянная времени, - запаздывание, которые должны быть определены в окрестности номинального режима работы объекта.
- запаздывание, которые должны быть определены в окрестности номинального режима работы объекта.