
|
|
Теорема: Всякая плоская система пар эквивалентна одной результирующей паре, момент которой равен алгебраической сумме моментов данных пар.Пусть даны три пары с моментами m1, m2 и m3, действующие в одной плоскости (рис. 1а). Тогда вместо заданной системы пар получим новую систему, эквивалентную данной, причем моменты данных и новых пар будут равны, т. е. m1 = -P1d; m2 = F1d; m3 = -Qd. Сложив три силы в точке А, получим равнодействующую R1, модуль которой R1 = P1 + Q1 – F1. Сложив три силы в точке В (рис. 4b), получим равнодействующую R2, модуль которой R2 = P2 + Q2 – F2, причем очевидно, что силы R1 и R2 равны по модулю, параллельны и противоположно направлены. Момент этой результирующей пары: m = -R1d = -(P1 + Q1 – F1)d = -P1d – Q1d + F1d, или m = m1 +m2 + m3. Аналогичное доказательство можно привести для любой плоской системы пар, т. е. в общем виде можно записать: m = Σmi, что и требовалось доказать. *** Условие равновесия плоской системы пар Применяя доказанную ранее теорему о сложении пар к плоской системе пар, находящихся в равновесии, запишем: m = Σmi = 0. Следовательно, условие равновесия плоской системы пар в общем виде будет выглядеть так: Σmi = 0, а формулируется следующим образом: для равновесия плоской системы пар необходимо и достаточно, чтобы алгебраическая сумма моментов данных пар равнялась нулю. *** Опоры и опорные реакции балок Опоры балок по их устройству могут быть разделены на три основных типа (см. рисунок 6): шарнирно-подвижная (опора А), шарнирно-неподвижная (опора В) и жесткая заделка (опора С). На приведенном рисунке показаны два способа условного изображения шарнирно-неподвижной опоры (опора А). Применим правило для определения направления реакций связей и определим, какое направление могут иметь реакции представленных опор в зависимости от ограничений, накладываемых на балку. Шарнирно-подвижная опора допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. Если пренебречь трением на опоре и в шарнире, то реакция такой связи будет направлена перпендикулярно опорной плоскости, и неизвестна только по модулю (одно неизвестное). Шарнирно-неподвижная опора допускает только поворот вокруг оси шарнира, и не допускает никаких линейных перемещений. Реакция такой опоры будет направлена перпендикулярно оси шарнира; модуль и направление ее заранее не известны (два неизвестных). Жесткая заделка (защемление) не допускает ни линейных перемещений, ни поворотов защемленного конца балки. Жесткую заделку заменяют реактивной силой, неизвестной по модулю и направлению, и реактивным моментом (три неизвестных). Кроме перечисленных выше трех основных типов опор балок в конструкциях нередко балка свободно опирается на плоскость (поверхность) или ребро призмы (угол). В этих случаях направление реакций определяют, как для аналогичных типов связей, рассмотренных здесь. *** Пример решения задачи по определению реакций опор балки Пусть горизонтальная балка длиной l = 4 м закреплена на опорах, как показано на рисунке 7, и нагружена парой сил с моментом m = 420 Нм. Решение. Отбросим опоры, заменив их реакциями, и рассмотрим равновесие балки. Применим условие равновесия плоской системы пар и составим уравнение равновесия: Σmi = 0; -m + Rh = 0, где h = lcos30˚. Подставив известные значения, получим: R = m/h = m/(lcos30˚) = 420/(4×0,866) ≈ 120 Н. Задача решена. *** Пример решения задачи по определению реакции в жесткой заделке Пусть консольная балка длиной l = 2 м нагружена на свободном конце силой F = 3000 Н (рис. 8). Решение. Отбросим заделку, заменив ее реакциями, и рассмотрим равновесие балки. R = F = 3000 Н. Далее применим условие равновесия плоской системы пар и составим уравнение равновесия: m = Fl = 3000×2 = 6000 Нм. Задача решена. Момент силы Говорят, что когда-то великий Архимед изрек фразу: "Дайте мне точку опоры, и я переверну Землю". Современная физика утверждает, что с практической точки зрения, мудрый грек, конечно же, погорячился – даже сдвинуть на доли миллиметра такой массив, как планета с помощью мускульной силы человека – занятие не одного года, а уж перевернуть Землю... Что же такое – момент силы? Следует сразу оговориться, что момент силы - понятие относительное, поскольку без указания того, относительно какой точки он рассматривается, понятие момента силы теряет смысл (не путать с моментом пары сил, о котором речь пойдет вследующих статьях). Рассмотрим гайку, которую затягивают гаечным ключом определенной длины, прикладывая к концу ключа мускульное усилие. Понятие момента силы относительно точки ввел гениальный итальянец Леонардо да Винчи (1452-1519), который известен потомкам не только, как великий художник, но и видный ученый своего времени. Итак, по определению, момент силы относительно точки – это произведение модуля силы на ее плечо. М0(F) = Fh, где h – плечо силы относительно точки 0. Точка, относительно которой рассматривается момент силы, называется центром момента. Из приведенной выше формулы очевидно, что единицей измерения момента силы является ньютон × метр (Нм).
Теперь можно оценить справедливость высказывания Архимеда относительно возможности перевернуть Землю - при определенном плече силы, которую способны развить человеческие мускулы, это сделать теоретически возможно, но рука Архимеда должна была описать путь длиной в сотни тысяч километров для того, чтобы сдвинуть земной шар на доли миллиметра, поскольку потребовался бы огромной длины рычаг. Как вы понимаете, практически осуществить подобный подвиг нереально даже для такого уважаемого гения, как Архимед. Впрочем, бытующее утверждение о трудностях, связанных с перемещением Земли человеческой рукой не совсем безгрешны. Ведь мы, как обыватели, привыкли рассматривать Землю, как весомый предмет, забывая что она, будучи в космическом пространстве, обладает совсем другими весовыми категориями. Поэтому справедливее будет рассматривать не расстояние, на которое мог бы сдвинуть земной шар Архимед, а ускорение, с которым он попытался бы сдвинуть планету со своего места, т. е. фактически - побороть силу инерции Земли, как тела. Осталось разобраться со знаками для момента силы, ведь он, как и сила, является векторной величиной, т. е. характеризуется не только модулем, но и направлением своего вращающего действия. Одна и та же сила относительно разных точек может вызывать и положительный, и отрицательный момент(см. рисунок a). Отдельный случай, когда рассматриваемая точка (центр момента) лежит на линии действия силы. Очевидно, что в этом случае момент силы относительно этой точки будет равен нулю, поскольку плечо отсутствует (расстояние от линии действия силы до точки равно нулю). И еще одна важная деталь, которая следует из определения момента силы относительно точки: если переносить силу вдоль линии ее действия, то момент силы относительно любой точки не изменится, поскольку не изменится и расстояние от этой точки до линии действия силы, т. е. плечо (см. рисунок с). ***
  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 На основании следствия из теоремы об эквивалентных парах преобразуем эти пары так, чтобы их плечи стали равными d, и перенесем к произвольно взятому на плоскости отрезку АВ длиной d.
На основании следствия из теоремы об эквивалентных парах преобразуем эти пары так, чтобы их плечи стали равными d, и перенесем к произвольно взятому на плоскости отрезку АВ длиной d. Тем не менее, с теоретической точки зрения Архимед прав – если найти соответствующую точку опоры, то с помощью рычага Землю сдвинуть с места может даже комар. Дело в том, что здесь играет роль не сила, как таковая, а ее момент.
Тем не менее, с теоретической точки зрения Архимед прав – если найти соответствующую точку опоры, то с помощью рычага Землю сдвинуть с места может даже комар. Дело в том, что здесь играет роль не сила, как таковая, а ее момент.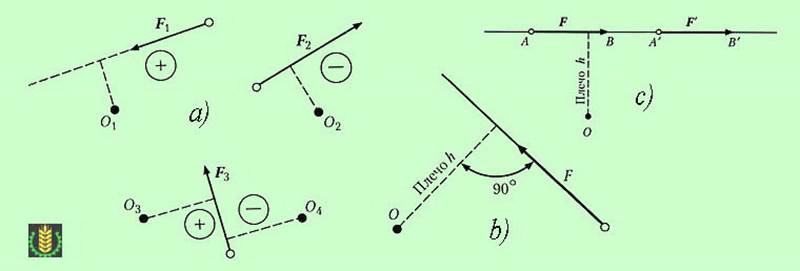 При расчетах в технической механике условно считают, что если момент силы стремиться вращать свое плечо вокруг центра момента против часовой стрелки, то он является положительным, если по часовой стрелке - отрицательным (см. рисунок a).
При расчетах в технической механике условно считают, что если момент силы стремиться вращать свое плечо вокруг центра момента против часовой стрелки, то он является положительным, если по часовой стрелке - отрицательным (см. рисунок a).