
|
|
Правило знаков для моментов пары.Стр 1 из 7Следующая ⇒ Пара сил и момент пары В предыдущей статье мы рассматривали сложение пары антипараллельных сил, не равных по модулю и пришли к выводу, что равнодействующая таких сил существует и ее величина равна алгебраической сумме сил; точка приложения равнодействующей пары антипараллельных сил находится в пропорциональной зависимости от соотношения между модулями сил пары. Если пара антипараллельных сил состоит из одинаковых по модулю сил, то такая система сил называется парой сил или просто парой. Плоскость, в которой расположена пара, называется плоскостью действия пары. Расстояние между линиями действия сил, составляющих пару, называется плечом пары. Моментом пары называется произведение модуля одной из сил, составляющих пару, на плечо: M(F1, F2) = F1h =F2h = m. Момент пары и момент силы имеют одинаковую размерность - ньютон×метр (Нм). Правило знаков для моментов пары. Условимся считать момент пары положительным, если она стремится вращать свое плечо против часовой стрелки, и наоборот. Если сделать геометрические построения (см. рисунок 1), то можно сделать вывод, что момент пары численно равен удвоенной площади треугольника, у которого основанием является вектор одной из сил пары, а высотой – плечо пары (как известно, площадь треугольника равна половине произведения основания на высоту). *** Основные свойства пары сил Основные свойства пары сил характеризуются следующими тремя теоремами. Теорема I.Пара сил не имеет равнодействующей. Дана пара сил (F1, F2) с плечом h. (см. рисунок 2а). Теорема II.Алгебраическая сума моментов сил, составляющих пару, относительно любой точки плоскости действия пары есть величина постоянная, равная моменту пары.
Дана пара сил (F1, F2) с плечом h. (см. рисунок 2b). Выберем в плоскости действия пары произвольную точку А и примем ее за центр моментов: MA(F1) = -F1a; MA(F2) = F2(a+h). Сложим правые и левые части этих равенств (не забываем, что |F1| = |F2|): MA(F1) + MA(F2) = -F1а + F2(a+h) = -F1а + F2а + F2h = F2h = m. Теорема доказана. Из этой теоремы следует, что при любом центре моментов пара сил войдет в уравнение моментов с одним и тем же знаком и одной и той же величиной. *** Теорема III.Алгебраическая сумма проекций сил пары на любую ось всегда равна нулю. Дана пара сил (F1, F2) и ось z, лежащая в плоскости действия пары (см. рисунок 3). Из равенства заштрихованных треугольников видно, что F1z = F2z, при этом проекция одной из сил положительная, проекция другой силы – отрицательная, следовательно, сумма этих проекций равна нулю. Из теорем I и III следует, что пара сил не может входить ни в уравнение сил, ни в уравнение проекций сил, поскольку ее нельзя заменить ни равнодействующей, ни проекцией силы. *** Эквивалентные пары Две пары называют эквивалентными, если одну из них можно заменить другой, не нарушая механического состояния свободного твердого тела. Теорема об эквивалентных парах формулируется так: если моменты двух пар алгебраически равны, то эти пары эквивалентны. Пусть даны две пары (F1, F2) и (Q1, Q2), моменты которых алгебраически равны (см. рисунок 4), т. е.: M(F1, F2) = M(Q1, Q2), или Fa = Qh. Продолжим линии действия сил пары до их взаимного пересечения в точках А и В. На основании следствия из III и IV аксиом статики перенесем силы F и F1 вдоль линий их действия в точки А и В. Силы T и Т1 представляют собой уравновешенную систему, так как они равны по модулю и действуют по одной прямой в противоположные стороны. На основанииаксиомы IV такую систему можно отбросить. Силы S и S1 представляют собой пару сил с плечом b. Рассмотрим треугольники AmB и AnB. М(F, F1) = М(S, S1) или Fa = Sb. По условиям теоремы Fa = Qb, следовательно Sb = Qb, отсюда S = Q, S1 = Q1. Силы S и Q равны по модулю, действуют вдоль одной прямой в одном направлении, следовательно они эквивалентны друг другу; на этом же основании можно сделать вывод об эквивалентности сил S1 и Q1. Очевидно, что тогда пара (Q,O1) ≡ паре (S,S1). Так как две пары порознь эквивалентны одной и той же третьей паре, то эти пары тоже будут эквивалентны между собой: М(F, F1) = М(Q, Q1), что и требовалось доказать. Из доказательства теоремы об эквивалентных парах вытекает четыре следствия: · не изменяя механического состояния тела, пару можно переносить как угодно в плоскости ее действия; · не изменяя механического состояния тела, можно менять силы и плечо пары, но так, чтобы ее момент оставался неизменным; · чтобы задать пару, достаточно задать ее момент, поэтому иногда слово "пара" заменяют словом "момент"; · условия равновесия плоской системы параллельных сил будут справедливы, если вместе с такой системой действуют и пары сил, так как их можно повернуть в плоскости действия и поставить силы пары параллельно другим силам системы. *** Теорема о сложении пар Решение. Отбросим опоры, заменив их реакциями, и рассмотрим равновесие балки. Применим условие равновесия плоской системы пар и составим уравнение равновесия: Σmi = 0; -m + Rh = 0, где h = lcos30˚. Подставив известные значения, получим: R = m/h = m/(lcos30˚) = 420/(4×0,866) ≈ 120 Н. Задача решена. *** Решение. Отбросим заделку, заменив ее реакциями, и рассмотрим равновесие балки. R = F = 3000 Н. Далее применим условие равновесия плоской системы пар и составим уравнение равновесия: m = Fl = 3000×2 = 6000 Нм. Задача решена. Момент силы Говорят, что когда-то великий Архимед изрек фразу: "Дайте мне точку опоры, и я переверну Землю". Современная физика утверждает, что с практической точки зрения, мудрый грек, конечно же, погорячился – даже сдвинуть на доли миллиметра такой массив, как планета с помощью мускульной силы человека – занятие не одного года, а уж перевернуть Землю... Что же такое – момент силы? Следует сразу оговориться, что момент силы - понятие относительное, поскольку без указания того, относительно какой точки он рассматривается, понятие момента силы теряет смысл (не путать с моментом пары сил, о котором речь пойдет вследующих статьях). Рассмотрим гайку, которую затягивают гаечным ключом определенной длины, прикладывая к концу ключа мускульное усилие. Понятие момента силы относительно точки ввел гениальный итальянец Леонардо да Винчи (1452-1519), который известен потомкам не только, как великий художник, но и видный ученый своего времени. Итак, по определению, момент силы относительно точки – это произведение модуля силы на ее плечо. М0(F) = Fh, где h – плечо силы относительно точки 0. Точка, относительно которой рассматривается момент силы, называется центром момента. Из приведенной выше формулы очевидно, что единицей измерения момента силы является ньютон × метр (Нм).
Теперь можно оценить справедливость высказывания Архимеда относительно возможности перевернуть Землю - при определенном плече силы, которую способны развить человеческие мускулы, это сделать теоретически возможно, но рука Архимеда должна была описать путь длиной в сотни тысяч километров для того, чтобы сдвинуть земной шар на доли миллиметра, поскольку потребовался бы огромной длины рычаг. Как вы понимаете, практически осуществить подобный подвиг нереально даже для такого уважаемого гения, как Архимед. Впрочем, бытующее утверждение о трудностях, связанных с перемещением Земли человеческой рукой не совсем безгрешны. Ведь мы, как обыватели, привыкли рассматривать Землю, как весомый предмет, забывая что она, будучи в космическом пространстве, обладает совсем другими весовыми категориями. Поэтому справедливее будет рассматривать не расстояние, на которое мог бы сдвинуть земной шар Архимед, а ускорение, с которым он попытался бы сдвинуть планету со своего места, т. е. фактически - побороть силу инерции Земли, как тела. Осталось разобраться со знаками для момента силы, ведь он, как и сила, является векторной величиной, т. е. характеризуется не только модулем, но и направлением своего вращающего действия. Одна и та же сила относительно разных точек может вызывать и положительный, и отрицательный момент(см. рисунок a). Отдельный случай, когда рассматриваемая точка (центр момента) лежит на линии действия силы. Очевидно, что в этом случае момент силы относительно этой точки будет равен нулю, поскольку плечо отсутствует (расстояние от линии действия силы до точки равно нулю). И еще одна важная деталь, которая следует из определения момента силы относительно точки: если переносить силу вдоль линии ее действия, то момент силы относительно любой точки не изменится, поскольку не изменится и расстояние от этой точки до линии действия силы, т. е. плечо (см. рисунок с). ***
ЗАДАЧА 2.5. (6)
Решение: За объект равновесия принимаем узел A, На узел действуют четыре силы: активная сила При составлении уравнений равновесия будем следовать рекомендациям п. 2.1.
Значения косинусов углов Из уравнений равновесия находим
Для равновесия пространственной системы произвольно расположенных сил необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил на каждую из трех осей координат была равна нулю и чтобы алгебраическая сумма моментов всех сил относительно каждой из этих осей была равна нулю. Строгое обоснование приведенного выше условия равновесия пространственной системы произвольно расположенных сил требует знания некоторых вопросов, не предусмотренных программами учреждений среднего профессионального образования, поэтому условие равновесия такой системы здесь приводится без доказательства. Математически условие равновесия пространственной системы произвольно расположенных сил можно записать в виде уравнений: · ΣX = 0; ΣMx(Fi) = 0; · ΣY = 0; ΣMy(Fi) = 0; · ΣZ = 0; ΣMz(Fi) = 0. Свободное тело в пространстве имеет шесть степеней свободы, а именно: возможность перемещаться в направлениях трех взаимно-перпендикулярных осей координат и возможность вращаться вокруг этих осей. Таким образом, шести степеням свободы тела в пространстве соответствуют шесть условий равновесия. Очевидно, что все выведенные ранее условия равновесия для различных систем сил являются частными случаями условия равновесия пространственной системы произвольно расположенных сил. Так как условия равновесия пространственной системы сил справедливы для любых прямоугольных осей координат, то при решении данной задачи систему координат можно изменять, т. е. часть уравнений равновесия составить для одних осей координат, а часть – для измененных. В некоторых случаях этот прием упрощает решение задач. *** Теорема о моменте равнодействующей относительно оси Теорема: момент равнодействующей относительно оси равен алгебраической сумме моментов, составляющих сил относительно этой же оси. Пусть даны пространственная система n произвольно расположенных сил, приложенных к телу, и равнодействующая этой системы сил FΣ (см. рисунок 4):
(F1, F2, F3,....Fn) ≡ FΣ. Приложим к телу другую систему сил, равнодействующая которой F’Σ по модулю равна FΣ и направлена по той же линии действия, но в противоположную сторону, т. е. является уравновешивающей данной системы сил. (F1, F2, F3,....Fn, F’Σ) ≡ 0, или (FΣ, F’Σ) ≡ 0. Так как обе записанные выше системы сил эквивалентны нулю, т. е. уравновешены, то к ним можно применить любое условие равновесия, например ΣMx(Fi) = 0. Запишем это условие для обеих систем: Mx(F1) = Mx(F2) + Mx(F2) +.... + Mx(Fn) + Mx(F’Σ) = 0; Так как правые части этих равенств равны, то будут равны и левые: Mx(F1) = Mx(F2) + Mx(F3) +.... +Mx(Fn) + Mx(F’Σ) = Mx(FΣ) + Mx(F’Σ). Сократив общее слагаемое Mx(F’Σ), получим: Mx(F1) = Mx(F2) + Mx(F3) +.... +Mx(Fn) = Mx(FΣ) или ΣMx(Fi) + Mx(FΣ). Теорема доказана. *** …
Пара сил и момент пары В предыдущей статье мы рассматривали сложение пары антипараллельных сил, не равных по модулю и пришли к выводу, что равнодействующая таких сил существует и ее величина равна алгебраической сумме сил; точка приложения равнодействующей пары антипараллельных сил находится в пропорциональной зависимости от соотношения между модулями сил пары. Если пара антипараллельных сил состоит из одинаковых по модулю сил, то такая система сил называется парой сил или просто парой. Плоскость, в которой расположена пара, называется плоскостью действия пары. Расстояние между линиями действия сил, составляющих пару, называется плечом пары. Моментом пары называется произведение модуля одной из сил, составляющих пару, на плечо: M(F1, F2) = F1h =F2h = m. Момент пары и момент силы имеют одинаковую размерность - ньютон×метр (Нм). Правило знаков для моментов пары. Условимся считать момент пары положительным, если она стремится вращать свое плечо против часовой стрелки, и наоборот. Если сделать геометрические построения (см. рисунок 1), то можно сделать вывод, что момент пары численно равен удвоенной площади треугольника, у которого основанием является вектор одной из сил пары, а высотой – плечо пары (как известно, площадь треугольника равна половине произведения основания на высоту). *** Основные свойства пары сил Основные свойства пары сил характеризуются следующими тремя теоремами. Теорема I.Пара сил не имеет равнодействующей. Дана пара сил (F1, F2) с плечом h. (см. рисунок 2а). Теорема II.Алгебраическая сума моментов сил, составляющих пару, относительно любой точки плоскости действия пары есть величина постоянная, равная моменту пары.
Дана пара сил (F1, F2) с плечом h. (см. рисунок 2b). Выберем в плоскости действия пары произвольную точку А и примем ее за центр моментов: MA(F1) = -F1a; MA(F2) = F2(a+h). Сложим правые и левые части этих равенств (не забываем, что |F1| = |F2|): MA(F1) + MA(F2) = -F1а + F2(a+h) = -F1а + F2а + F2h = F2h = m. Теорема доказана. Из этой теоремы следует, что при любом центре моментов пара сил войдет в уравнение моментов с одним и тем же знаком и одной и той же величиной. *** Теорема III.Алгебраическая сумма проекций сил пары на любую ось всегда равна нулю. Дана пара сил (F1, F2) и ось z, лежащая в плоскости действия пары (см. рисунок 3). Из равенства заштрихованных треугольников видно, что F1z = F2z, при этом проекция одной из сил положительная, проекция другой силы – отрицательная, следовательно, сумма этих проекций равна нулю. Из теорем I и III следует, что пара сил не может входить ни в уравнение сил, ни в уравнение проекций сил, поскольку ее нельзя заменить ни равнодействующей, ни проекцией силы. *** Эквивалентные пары Две пары называют эквивалентными, если одну из них можно заменить другой, не нарушая механического состояния свободного твердого тела. Теорема об эквивалентных парах формулируется так: если моменты двух пар алгебраически равны, то эти пары эквивалентны. Пусть даны две пары (F1, F2) и (Q1, Q2), моменты которых алгебраически равны (см. рисунок 4), т. е.: M(F1, F2) = M(Q1, Q2), или Fa = Qh. Продолжим линии действия сил пары до их взаимного пересечения в точках А и В. На основании следствия из III и IV аксиом статики перенесем силы F и F1 вдоль линий их действия в точки А и В. Силы T и Т1 представляют собой уравновешенную систему, так как они равны по модулю и действуют по одной прямой в противоположные стороны. На основанииаксиомы IV такую систему можно отбросить. Силы S и S1 представляют собой пару сил с плечом b. Рассмотрим треугольники AmB и AnB. М(F, F1) = М(S, S1) или Fa = Sb. По условиям теоремы Fa = Qb, следовательно Sb = Qb, отсюда S = Q, S1 = Q1. Силы S и Q равны по модулю, действуют вдоль одной прямой в одном направлении, следовательно они эквивалентны друг другу; на этом же основании можно сделать вывод об эквивалентности сил S1 и Q1. Очевидно, что тогда пара (Q,O1) ≡ паре (S,S1). Так как две пары порознь эквивалентны одной и той же третьей паре, то эти пары тоже будут эквивалентны между собой: М(F, F1) = М(Q, Q1), что и требовалось доказать. Из доказательства теоремы об эквивалентных парах вытекает четыре следствия: · не изменяя механического состояния тела, пару можно переносить как угодно в плоскости ее действия; · не изменяя механического состояния тела, можно менять силы и плечо пары, но так, чтобы ее момент оставался неизменным; · чтобы задать пару, достаточно задать ее момент, поэтому иногда слово "пара" заменяют словом "момент"; · условия равновесия плоской системы параллельных сил будут справедливы, если вместе с такой системой действуют и пары сил, так как их можно повернуть в плоскости действия и поставить силы пары параллельно другим силам системы. *** Теорема о сложении пар   Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 Тем не менее, с теоретической точки зрения Архимед прав – если найти соответствующую точку опоры, то с помощью рычага Землю сдвинуть с места может даже комар. Дело в том, что здесь играет роль не сила, как таковая, а ее момент.
Тем не менее, с теоретической точки зрения Архимед прав – если найти соответствующую точку опоры, то с помощью рычага Землю сдвинуть с места может даже комар. Дело в том, что здесь играет роль не сила, как таковая, а ее момент.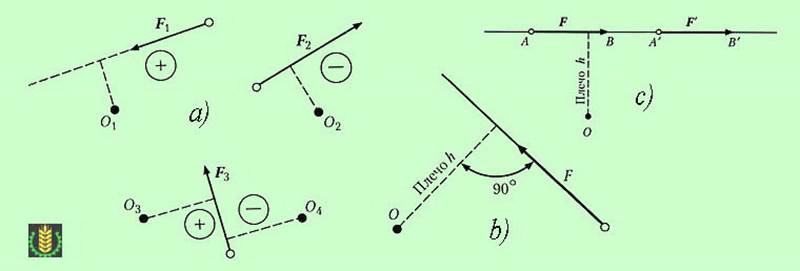 При расчетах в технической механике условно считают, что если момент силы стремиться вращать свое плечо вокруг центра момента против часовой стрелки, то он является положительным, если по часовой стрелке - отрицательным (см. рисунок a).
При расчетах в технической механике условно считают, что если момент силы стремиться вращать свое плечо вокруг центра момента против часовой стрелки, то он является положительным, если по часовой стрелке - отрицательным (см. рисунок a). Рис. 2.12.
Рис. 2.12.
 м,
м,  м,
м,  м. К узлу A прикреплен груз
м. К узлу A прикреплен груз  Н. Определить усилия в стержне и тросах, пренебрегая их весом.
Н. Определить усилия в стержне и тросах, пренебрегая их весом.
 , реакции тросов
, реакции тросов  и стержня
и стержня  . Направления реакций приняты в соответствии с указаниями п.п. 1.2.2 и 1.2.3.
. Направления реакций приняты в соответствии с указаниями п.п. 1.2.2 и 1.2.3.
 и
и  найдем из прямоугольных треугольников
найдем из прямоугольных треугольников  и
и  .
. ,
, Н,
Н, Н.
Н.