
|
|
Структура АСР и ее основные элементы.Стр 1 из 16Следующая ⇒ ГЛАВА 1. Основные понятия и определения в теории и практике автоматического регулирования
Основная задача автоматического регулирования энергетической установки - обеспечить ее работу во всей области гарантированных режимов. Режимы работы различных энергоустановок характеризуются значениями одной или несколькими величин. Так, режимы работы парового котла характеризуются давлением и температурой пара при выходе из котла, его паропроизводительностью. Режим работы турбины – частотой вращения ротора турбины и напряжением на клеммах генератора для конденсационного турбогенератора, для турбин с отборами пара для потребителя еще и давлением пара в отборах- теплофикационном или производственном. Те параметры режима работы энергоустановки, которые регламентируются внешним потребителем, называются внешними регулируемыми параметрами, остальные внутренними. Для турбогенератора внешними являются частота вращения ротора, напряжение на клеммах генератора и давление в отборах пара к потребителю. Для котельной установки- давление, температура и расход свежего пара. Внутренние регулируемые параметры в большинстве своем относятся к параметрам, определяющим регламентное состояние и работу вспомогательного оборудования электростанций. Если в процессе работы энергоустановки регулируемые величины существенно отклоняются от требуемых (нормируемых) значений, то в работу вступают регулировочные органы энергоустановки, изменяя в необходимом направлении значения этих величин. В таком случае энергоустановка становится объектом управления в широком смысле или объектом регулирования, например, по одному внешнему параметру регулирования. Для того, чтобы была обеспечена нормальная работа объекта регулирования (ОР) во всей области гарантированных режимов, он должен обладать определенной статической характеристикой, которая связывает режимные параметры энергоустановок в равновесных процессах, последняя может быть выражена аналитической или графической зависимостью регулируемой величины от нагрузки. Например: n=f(Рн) или w=f(Nт), где Рн – нагрузка турбогенератора, Nт – электрическая мощность турбогенератора, n - число оборотов ротора турбины, w - его угловая скорость вращения. Р=f(Dп) - давление пара при выходе из котла, Dп- расход пара, tпп = f(Dп) – температура свежего пара.
Рис. 1.1 Статические характеристики объекта регулирования. а) турбины по скорости вращения ротора,б), в) котла по давлению и температуре пара.
Естественная характеристика ОР зачастую может не удовлетворять потребителя. Чтобы привести ее в соответствие с требованиями потребителя применяется система регулирования, которая позволяет получить надлежащую статическую характеристику ОР. Система регулирования может состоять из нескольких элементов, каждый из которых имеет свою статическую характеристику. Статическая характеристика ОР может быть получена на основании статических характеристик элементов, входящих в состав системы регулирования. Таким образом, статическая характеристика ОР является результирующей, поскольку, влияя на статические характеристики элементов системы регулирования, можно получить приемлемую для потребителя статическую характеристику ОР. Задача нахождения требуемой статической характеристики относится к статике регулирования - регулированию в установившихся (равновесных) процессах. Режимы работы ОР и их систем регулирования называются равновесными или установившимися, если регулируемая величина и все действующие в системе возмущения не изменяются во времени. Так, установившиеся движение турбогенератора возможно при равенстве момента движущих сил Мт, развиваемых паром или газом на лопатках турбины, и момента сил сопротивления - электромагнитных сил генератора Мг, т.е. При неустановившемся (неравновесном) режиме в действие приходит система регулирования. Связи между элементами системы регулирования и объектом регулирования в переходных процессах называются динамическим направленного действия. Они определяют характер переходных процессов в системе. Задача системы регулирования – перевести ОР в такой режим, который соответствует равновесному состоянию системы. Изучение переходных процессов составляет вторую основную задачу автоматического регулирования и относится к динамике регулирования. Первым шагом при изучении динамики регулирования должно быть разграничение систем годных от систем не годных для целей управления объектом. Такое разграничение выполняется путем исследования устойчивости систем регулирования. Система регулирования называется устойчивой, если будучи выведенной из состояния равновесия сообщением ей некоторых начальных отклонений в своем дальнейшем движении будет стремиться к некоторому равновесному состоянию. Регулирование, не удовлетворяющее этому условию, называется неустойчивым. Исследование устойчивости регулирования имеет целью дать качественную оценку той или иной принципиальной схеме регулирования, то есть установить правильно ли будет функционировать данная система регулирования при каких-либо нарушениях равновесного режима или нет. В исследованиях динамических процессов регулирования, предполагают, что к ОР или регулятору приложены некоторые воздействия. Их называют соответственно: возмущающими и управляющими. В зависимости от характера связей системы регулирования делятся на системы работающие по: 1) замкнутому циклу (Рис. 1.2)
Рис. 1.2 Схема замкнутого регулирования Р-Р- регулятор, ОР- объект регулирования, ГОС – главная обратная связь,
2) разомкнутому циклу (Рис. 1.3.)
Рис. 1.3 Схема разомкнутого регулирования.
Наличие обратной связи между ОР и регулятором, которую называют главной, является необходимым условием автоматической системы регулирования (АСР), т.е. АСР это замкнутые динамические системы направленного действия. В теплоэнергетике находят применение системы регулирования нескольких величин. При этом их регуляторы связаны вне ОР. Такие схемы называются системами связанного регулирования, например, АСР теплофикационных турбин. Системы регулирования, где управляющее воздействие изменяется в зависимости от времени по заданному закону, носят название систем программного регулирования.
Переходные процессы в АСР. Нарушения равновесных режимов в АСР происходят под влиянием различных факторов, например, управляющего воздействия, направленного к регулятору от задатчика, или возмущающего воздействия приложенного к объекту регулирования. Системы регулирования ведут себя по отношению к этим воздействиям существенно различным образом. В то время как управляющее воздействие определяет величину и направление изменения регулируемого параметра, возмущающее воздействие не должно существенно влиять на изменение регулируемых параметров Виды переходных процессов в АСР при единичных ступенчатых воздействиях
Рис. 1.6 Переходные процессы в устойчивых АСР. а) – при управляющем воздействии, б) – при возмущающем воздействии.
Для устойчивых АСР переходные процессы сходящиеся, т.е.
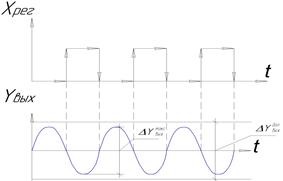
Рис. 1.7 Переходные процессы в АСР: а) неустойчивых, б) находящихся на границе устойчивости.
АСР может находится на границе устойчивости, когда регулируемый параметр не принимает заданного значения и его отклонения имеет постоянную амплитуду отклонения от заданного значения (Рис. 1.7,б). При том или ином воздействии требуемые и действительные значения регулируемой величины могут отличаться друг от друга. Разность между заданным
Рис. 1.8 Ошибки и отклонения для АСР.
Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и некоторым фиксированным ее значением, принятым за начало отсчета. Различают динамическую ошибку и отклонение в переходных процессах и ошибку и отклонение в равновесных режимах - статическая ошибка, отклонение.
Теорема Ляпунова.
А.М. Ляпунов при исследовании устойчивости динамических систем пришел к следующим выводам относительно законности использования линеаризованных дифференциальных уравнений для суждения об устойчивости действительной системы в малом. 1) Если характеристическое уравнение линеаризованной системы имеет все корни с отрицательными вещественными частями, то действительная система будет устойчива. При этом никакие отброшенные при линеаризации уравнения члены второй и высших степеней отклонения регулируемого параметра не могут изменить устойчивость системы. 2) Если характеристическое уравнение линеаризованной системы имеет хотя бы один корень с положительной вещественной частью, то действительная система будет неустойчива. При этом никакие отброшенные при линеаризации члены второй и высших степеней отклонения регулируемого параметра не могут придать устойчивость системе. 3) Если характеристическое уравнение линеаризованной системы имеет хотя бы один нулевой корень или пару чисто мнимых сопряженных корней, то поведение действительной системы не может определяться ее линеаризованным уравнением. В этих случаях отброшенные при линеаризации уравнения члены вторых и высших степеней отклонения регулируемого параметра коренным образом изменяют описание динамического процесса реальной системы. Следует отметить, что приведенная теорема Ляпунова об устойчивости линеаризованных систем справедлива только тогда, когда у нелинейной системы функция, выражающая зависимость регулируемой величины от переменных параметров имеет конечные, непрерывные и однозначные производные в окрестности точки, относительно которой исследуется процесс регулирования. Если динамика системы точно описывается линейным дифференциальным уравнением с постоянными коэффициентами, то устойчивость в малом обеспечивает неограниченную устойчивость системы, т.е. устойчивость в большом независимо от величины отклонения. Относительно систем, движение которых описывается нелинейными дифференциальными уравнениями, этого сказать нельзя. Возможны случаи, когда система, устойчивая в малом, оказывается неустойчивой в большом. Поэтому методы исследования устойчивости нелинейных систем существенно отличается от методов исследования линейных систем. Если отложить в прямоугольных координатах плоскости корней по оси абсцисс вещественные части, а по оси ординат – коэффициенты при мнимых частях корней характеристического уравнения, то в этой плоскости каждому корню будет соответствовать точка. Вещественные корни определяют точки на оси абсцисс, а пара сопряженных комплексных корней две точки, расположенные симметрично относительно оси абсцисс.
Рис 5.1 Плоскость корней характеристического уравнения.
1) Таким образом, для того чтобы действительная система была устойчива, необходимо и достаточно, чтобы корни характеристического уравнения линеаризованной системы находились в комплексной плоскости корней слева от мнимой оси. Если хотя бы одна точка лежит на мнимой оси, то система находится на границе устойчивости. Следовательно, для суждения об устойчивости АСР нет необходимости вычислять все корни характеристического уравнения, достаточно лишь выяснить, все ли они расположены слева от мнимой оси. Однако уравнения степени выше четвертой не решаются в радикалах. Таким образом, возникает необходимость иметь признаки, которые позволили бы без решения характеристического уравнения, во-первых, проверить устойчивость конкретной АСР, а во-вторых, определили бы необходимые и достаточные условия для того чтобы переходные процессы в АСР протекали устойчиво. При исследовании устойчивости возможны две постановки задачи для определения устойчивости системы. Первая сводится к тому, что если известны все заданные конструктивные и настроечные параметры системы, то нужно определить будет ли система устойчива. Решение этой задачи достигается с помощью использования критериев устойчивости. Вторая постановка предполагает известными некоторые параметры, например, конструктивные. Решение этой задачи сводится к определению пределов изменения остальных параметров, например, настроечных, обеспечивающих устойчивость исследуемой системы, что достигается построение областей устойчивости.
Законы регулирования.
К числу реализуемых законов регулирования в теплоэнергетике относят: - пропорциональный закон регулирования, П – закон; - интегральный закон, И – закон; - пропорционально - -интегральный закон, ПИ – закон; - пропорционально – дифференциальный закон, ПД – закон; - пропорционально – интегрально - дифференциальный закон, ПИД - закон; Действие регулятора всегда направленно в сторону противоположную отклонению регулируемого параметра, поэтому в уравнениях, описывающих законы регулирования, регулирующее воздействие в сторону объекта регулирования всегда со знаком действия, противоположным отклонению регулируемой величины.
Выбор типа регулятора. Во многих случаях возможность выбора регулятора по виду реализуемого в нем закона регулирования ограничена, поскольку большинство систем регулирования предназначено для автоматической стабилизации параметров при весьма ограниченном диапазоне их допустимых отклонений. Выбор закона регулирования осуществляется в зависимости от сложности ОР и требований к точности поддержания регулируемой величины. В тех случаях, когда допускаются относительно большие колебания регулируемого параметра, целесообразно устанавливать простейшие релейно-пропорциональные регуляторы, работающие по принципу «открыто – закрыто» и реализующие
При наладке этих регуляторов важно соблюдать одно требование Статическая характеристика
Рис. 9.2 Статическая характеристика Рп-регулятора.
Динамическая характеристика
Рис. 9.3 Динамическая характеристика Рп-регулятора.
При более жестких требованиях к автоматической системе регулирования, например, при недопустимости автоколебательных режимов, возникающих в системах с позиционными
где
Для ОР без самовыравнивания П- регулятор устанавливается при условии, что
Если
Статическая настройка.
Цель статической настройки – установить точность поддержания заданного значения регулируемой величины в установившемся режиме. В объем статической настройки входят следующие операции: - балансировка измерительного блока регулятора, которая выполняется совместно с настройкой датчиков таким образом, чтобы выходной сигнал схемы после ИБ был равен нулю при заданном значении измеряемого параметра; - фазировка сигналов, при этом включение регулятора в строну «меньше» должно приводить к прикрытию регулировочного органа и наоборот, включение в сторону «больше» к их открытию; - обеспеченье статической точности регулирования, задаваясь значением допустимого изменения регулируемой величины. Обычно принимают, что зона нечувствительности регулятора в единицах регулируемого параметра, должна составлять половину допускаемого отклонения этого параметра; - настройка статического соотношения параметров, которая должна обеспечивать правильное соотношение регулируемых параметров регулирования на входе в КУУ в любой точке регулируемого диапазона АСР; - отстройка от пульсаций сигналов, выполняеемая для стабильной работы регулятора. Значение измеряемых параметров в АСР, например, расхода и давления жидкостей, газов и уровней в сосудах обычно пульсирует. Это приводит к тому, что в сигналах датчиков таких параметров содержатся случайные колебания – пульсации сигналов. На практике принято считать работу регулятора стабильной, если при отсутствии возмущающих воздействий на объект регулирования регулятор включается под действием самопроизвольных изменений регулируемой величины не более 3 – 4 раз в минуту; - определение диапазона действия задатчика. Его выбирают по технологически возможному и допустимому диапазону изменения выходной регулируемой величины.
Динамическая настройка.
Целями динамической настройки является, во первых, обеспеченье устойчивости работы АСР, во вторых, получение приемлемого качества переходных процессов. Обычно настройка рассчитывается для одного из каналов воздействий, по которому регулирование является наиболее чувствительным и может обеспечить компенсацию возмущений, поступающих на объект регулирования по другим каналам. Параметры динамической настройки могут быть получены различными методами, которые условно можно разделить на две группы: экспериментальные и расчетные методы. Основное преимущество экспериментальных методов в том, что параметры настройки регуляторов определяются непосредственно на действующем оборудовании. Расчетные методы в некоторых случаях позволяет уменьшить время, затрачиваемое на настройку системы. Расчет настроек предусматривает определение численных значений параметров настройки регуляторов, обеспечивающих достижение требуемого качества регулирования: минимальные динамические и статические погрешности в процессе регулирования, минимальное время регулирования или же минимум линейного (квадратичного) интегрального показателя переходного процесса в замкнутой АСР. Настройка, обеспечивающая достижение требуемого качества регулирования и удовлетворяющая принятым ограничениям по перемещению регулировочного органа, считается оптимальной. Исходными данными для расчета настроек служат динамические, в частности, разгонные характеристики объектов регулирования, получаемые при регулирующем воздействием на объект регулирования со стороны регулировочного органа. При графической обработке переходных (разгонных) характеристик определяются следующие динамические параметры объекта: коэффициент усиления К, постоянную времени Т, время запаздывания t, отношение t/Т, коэффициент пропорциональности интегрирующего звена Ки=К/Т для объекта без самовыравнивания. Для определения настроек регулятора по найденным величинам рекомендуется расчетные формулы (Табл. 10.1) для настроек параметров регулятора при реализации тех или иных законов регулирования: Кр и d, Ти и Тд. Приведенные в таблице 10.1 настройки рассчитаны на степень затухания j=0,75 и минимум квадратичного интегрального критерия Формулы для расчета настроек являются приближенными, и требуется экспериментальная проверка полученных значений настроек на моделях или в условиях промышленной эксплуатации АСР. Существуют также полуэкспериментальные методы, в которых количество расчетов настройки сведено к минимальному. Это метод «раскачки» разомкнутой АСР и метод выведения замкнутой АСР на границу устойчивости. Расчетные формулы для настроек регуляторов приведены в таблицах 10.2 и 10.3 соответственно.
Рис. 10.1 Обработка кривых для определения параметров модели. Таблица 10.1
Таблица 10.2 Расчетные формулы настройки регуляторов при раскачке АСР
Таблица 10.3 Расчетные формулы настройки регуляторов при выведения АСР на границу устойчивости
Кр – коэффициент усиления регулятора, при котором получены критические колебания.
ГЛАВА 1. Основные понятия и определения в теории и практике автоматического регулирования
Основная задача автоматического регулирования энергетической установки - обеспечить ее работу во всей области гарантированных режимов. Режимы работы различных энергоустановок характеризуются значениями одной или несколькими величин. Так, режимы работы парового котла характеризуются давлением и температурой пара при выходе из котла, его паропроизводительностью. Режим работы турбины – частотой вращения ротора турбины и напряжением на клеммах генератора для конденсационного турбогенератора, для турбин с отборами пара для потребителя еще и давлением пара в отборах- теплофикационном или производственном. Те параметры режима работы энергоустановки, которые регламентируются внешним потребителем, называются внешними регулируемыми параметрами, остальные внутренними. Для турбогенератора внешними являются частота вращения ротора, напряжение на клеммах генератора и давление в отборах пара к потребителю. Для котельной установки- давление, температура и расход свежего пара. Внутренние регулируемые параметры в большинстве своем относятся к параметрам, определяющим регламентное состояние и работу вспомогательного оборудования электростанций. Если в процессе работы энергоустановки регулируемые величины существенно отклоняются от требуемых (нормируемых) значений, то в работу вступают регулировочные органы энергоустановки, изменяя в необходимом направлении значения этих величин. В таком случае энергоустановка становится объектом управления в широком смысле или объектом регулирования, например, по одному внешнему параметру регулирования. Для того, чтобы была обеспечена нормальная работа объекта регулирования (ОР) во всей области гарантированных режимов, он должен обладать определенной статической характеристикой, которая связывает режимные параметры энергоустановок в равновесных процессах, последняя может быть выражена аналитической или графической зависимостью регулируемой величины от нагрузки. Например: n=f(Рн) или w=f(Nт), где Рн – нагрузка турбогенератора, Nт – электрическая мощность турбогенератора, n - число оборотов ротора турбины, w - его угловая скорость вращения. Р=f(Dп) - давление пара при выходе из котла, Dп- расход пара, tпп = f(Dп) – температура свежего пара.
Рис. 1.1 Статические характеристики объекта регулирования. а) турбины по скорости вращения ротора,б), в) котла по давлению и температуре пара.
Естественная характеристика ОР зачастую может не удовлетворять потребителя. Чтобы привести ее в соответствие с требованиями потребителя применяется система регулирования, которая позволяет получить надлежащую статическую характеристику ОР. Система регулирования может состоять из нескольких элементов, каждый из которых имеет свою статическую характеристику. Статическая характеристика ОР может быть получена на основании статических характеристик элементов, входящих в состав системы регулирования. Таким образом, статическая характеристика ОР является результирующей, поскольку, влияя на статические характеристики элементов системы регулирования, можно получить приемлемую для потребителя статическую характеристику ОР. Задача нахождения требуемой статической характеристики относится к статике регулирования - регулированию в установившихся (равновесных) процессах. Режимы работы ОР и их систем регулирования называются равновесными или установившимися, если регулируемая величина и все действующие в системе возмущения не изменяются во времени. Так, установившиеся движение турбогенератора возможно при равенстве момента движущих сил Мт, развиваемых паром или газом на лопатках турбины, и момента сил сопротивления - электромагнитных сил генератора Мг, т.е. При неустановившемся (неравновесном) режиме в действие приходит система регулирования. Связи между элементами системы регулирования и объектом регулирования в переходных процессах называются динамическим направленного действия. Они определяют характер переходных процессов в системе. Задача системы регулирования – перевести ОР в такой режим, который соответствует равновесному состоянию системы. Изучение переходных процессов составляет вторую основную задачу автоматического регулирования и относится к динамике регулирования. Первым шагом при изучении динамики регулирования должно быть разграничение систем годных от систем не годных для целей управления объектом. Такое разграничение выполняется путем исследования устойчивости систем регулирования. Система регулирования называется устойчивой, если будучи выведенной из состояния равновесия сообщением ей некоторых начальных отклонений в своем дальнейшем движении будет стремиться к некоторому равновесному состоянию. Регулирование, не удовлетворяющее этому условию, называется неустойчивым. Исследование устойчивости регулирования имеет целью дать качественную оценку той или иной принципиальной схеме регулирования, то есть установить правильно ли будет функционировать данная система регулирования при каких-либо нарушениях равновесного режима или нет. В исследованиях динамических процессов регулирования, предполагают, что к ОР или регулятору приложены некоторые воздействия. Их называют соответственно: возмущающими и управляющими. В зависимости от характера связей системы регулирования делятся на системы работающие по: 1) замкнутому циклу (Рис. 1.2)
Рис. 1.2 Схема замкнутого регулирования Р-Р- регулятор, ОР- объект регулирования, ГОС – главная обратная связь,
2) разомкнутому циклу (Рис. 1.3.)
Рис. 1.3 Схема разомкнутого регулирования.
Наличие обратной связи между ОР и регулятором, которую называют главной, является необходимым условием автоматической системы регулирования (АСР), т.е. АСР это замкнутые динамические системы направленного действия. В теплоэнергетике находят применение системы регулирования нескольких величин. При этом их регуляторы связаны вне ОР. Такие схемы называются системами связанного регулирования, например, АСР теплофикационных турбин. Системы регулирования, где управляющее воздействие изменяется в зависимости от времени по заданному закону, носят название систем программного регулирования.
Структура АСР и ее основные элементы.
По виду используемой энергии различают АСР: механические, гидравлические, пневматические, электрические, комбинированные. Регулятор, выполняя свои функции, должен перемещать регулировочные органы (РО) в требуемом направлении, для обеспечения устойчивого движения системы. При этом нередко для перестановки РО требуются затраты значительной мощности, которую не могут развить регуляторы. В таких случаях в составе АСР предусматривают усилительные устройства, которые включают в передаточный механизм между регулятором и РО. Усилители воспроизводят все указания от регулятора, и мощность сигнала от них должна быть достаточной для необходимого перемещения регулировочных органов. Автоматическое регулирование без участия усилителей называется прямым регулированием, а при наличии их в передаточном механизме - непрямым регулированием.
 ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 . В действительности момент сил сопротивления, зависящий от потребителя (электросети), в процессе работы турбогенератора может изменяться, вследствие чего равновесие в силовом поле взаимодействующих сил нарушается, и ротор турбогенератора получает ускорение или замедление, из-за чего равновесный режим нарушается.
. В действительности момент сил сопротивления, зависящий от потребителя (электросети), в процессе работы турбогенератора может изменяться, вследствие чего равновесие в силовом поле взаимодействующих сил нарушается, и ротор турбогенератора получает ускорение или замедление, из-за чего равновесный режим нарушается.
 - управляющее воздействие,
- управляющее воздействие,  - возмущающее воздействие,
- возмущающее воздействие,  - регулируемый параметр,
- регулируемый параметр,  - входная величина отклонения регулируемого параметра.
- входная величина отклонения регулируемого параметра.
 и
и  (Рис. 1.6)
(Рис. 1.6)

 и действительным значением регулируемой величины
и действительным значением регулируемой величины  называется ошибкой регулирования.
называется ошибкой регулирования.

 , 2)
, 2)  , 3)
, 3) 
 -закон регулирования.
-закон регулирования. . То есть максимальное отклонение или ошибка регулируемого параметра в статике не должно быть больше допустимой. Для обеспечения этого условия пропускная способность регулирующего органа при его открытии должна превышать максимально возможное возмущение по нагрузке. Такой способ регулирования называется двухпозиционным – по числу позиций, которые может занимать регулировочный орган. При этом динамические процессы регулирования имеют колебательный характер.
. То есть максимальное отклонение или ошибка регулируемого параметра в статике не должно быть больше допустимой. Для обеспечения этого условия пропускная способность регулирующего органа при его открытии должна превышать максимально возможное возмущение по нагрузке. Такой способ регулирования называется двухпозиционным – по числу позиций, которые может занимать регулировочный орган. При этом динамические процессы регулирования имеют колебательный характер.
 -регуляторов. Основанием для установки
-регуляторов. Основанием для установки  ,
, -численное значение оптимальной степени обратной связи регулятора, численное значение которого определяется расчетом;
-численное значение оптимальной степени обратной связи регулятора, численное значение которого определяется расчетом; - установившееся значение регулируемой величины, определяется по кривой переходного процесса;
- установившееся значение регулируемой величины, определяется по кривой переходного процесса; - максимально допустимые по условиям технологического процесса или безопасной работы объекта остаточное отклонение регулируемой величины или ошибка регулирования;
- максимально допустимые по условиям технологического процесса или безопасной работы объекта остаточное отклонение регулируемой величины или ошибка регулирования; - максимально возможное ступенчатое возмущающее воздействие по нагрузке или эквивалентное возмущению воздействие со стороны регулировочного органа.
- максимально возможное ступенчатое возмущающее воздействие по нагрузке или эквивалентное возмущению воздействие со стороны регулировочного органа. ;
; для процессов регулирования в линейных АСР.
для процессов регулирования в линейных АСР.


 2)
2) 




 2)
2) 
 2)
2) 
 2)
2) 






















 - устанавливаемый на время опыта коэффициент П-регулятора
- устанавливаемый на время опыта коэффициент П-регулятора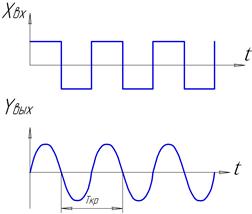





 - перемещение регулировочного органа, %.
- перемещение регулировочного органа, %.
