|
|
Основные отличия автоматики энергосистем от релейной защиты.Стр 1 из 15Следующая ⇒ Вопросы к экзамену по «Автоматике электроэнергетических систем» (часть Купарева М.А.) Основные отличия автоматики энергосистем от релейной защиты. Первоначально автоматические устройства применялись в энергетике главным образом для выполнения функций защиты электроэнергетических объектов от действия сверхтоков, возникающих в момент повреждения. Процессы, возникающие при этом, – это электромагнитные переходные процессы, а автоматические устройства, предназначенные для защиты от влияния этих процессов, – это устройства релейной защиты. Параллельно с развитием релейной защиты энергосистем в них начала развиваться и другая ветвь автоматики с ины-ми задачами, для выполнения которых также требуется высокая скорость реакции, недоступная человеку (например, задачи автоматического повторного включения (АПВ) ЛЭП, задачи автоматического ввода резерва (АВР); иногда это называют линейной или сетевой автоматикой). В настоящее время число этих задач настолько велико, что это привело к появлению отдельной самостоятельной дисциплины – системной автоматики. Релейная защита и системная автоматика – это два вида автоматического управления в энергосистемах, взаимосвязанных и взаимодополняющих друг друга. Но между ними имеются и отличия. Первое из них состоит в том, что для системной автоматики, как правило, определяющими являются в большей степени электромеханические переходные процессы, т.е. процессы, связанные с относительным движением роторов синхронных машин во время аварии и после неё. Сюда же добавляются процессы так называемой длительной динами-ки, происходящие со значительным (в несколько герц) изменением абсолютного движения (частоты вращения) синхронных генераторов. Второе отличие системной автоматики состоит в следующем. Действие УРЗ носит достаточно локальный характер, ограниченный одним или несколькими присоединениями, и лишь затяжка в отключении КЗ или возникновение каскадных возмущений может привести к дальнейшему развитию аварии. Системной автоматике присущ чаще всего глобальный характер действия и влияния на энер-госистему с охватом большого числа присоединений и достаточно большого района энергосистемы. Причём действие этой автоматики тесно связано с режимом работы энергосистемы или её части и оказывает своё влияние на этот режим. Устройства автоматики нормального режима энергосистем. Автоматика нормального режима – это обычно (за некоторыми исключениями) достаточно медленная автоматика, предназначенная, в основном, для помощи оперативному персоналу. Её влияние на процессы при авариях в энергосистеме ограничено и сказывается главным образом на послеаварийном режиме. К автоматике нормального режима относятся следующие автоматические устройства: пуска и останова агрегатов электростанций (технологическая автоматика); включения на параллельную работу (синхронизации) генераторов; регулирования частоты и активной мощности (АРЧМ), обеспечивающие поддержание на заданном уровне частоты в ЕЭЭС, оптимальное распределение активных нагрузок между электростанциями и генераторами, регулирование и ограничение перетоков активной мощности по линиям электропередачи; регулирования напряжений и перетоков реактивной мощности: автоматические регуляторы возбуждения (АРВ) синхронных машин (генераторов, синхронных компенсаторов и электродвигателей), автоматические регуляторы коэффициентов трансформации трансформаторов, автоматические регуляторы статических источников реактивной мощности; управления трансформаторами на подстанциях для включения и отключения одного из параллельно работающих трансформаторов с целью минимизации потерь электроэнергии в них, разгрузки перегруженного трансформатора путём снижения напряжения и отключения нагрузки. Таким образом, основными назначениями автоматических устройств управления нормальными режимами являются автоматизация сложного технологического процесса пуска и включения в работу синхронных генераторов, обеспечение требуемого качества электроэнергии; повышение экономичности работы ЭЭС, предотвращение и устранение опасной перегрузки генераторов, трансформаторов и ЛЭП, чреватой возможностью возникновения и развития аварийного нарушения режима. Устройства автоматики, выполняющие задачу выявления и отключения КЗ. Вторая группа автоматических устройств – автоматика аварийного режима – должна обладать большим быстродействием при интенсивном воздействии на процессы при авариях в энергосистемах и послеаварийном режиме, приближаясь в этом смысле к релейной защите. Эта группа осуществляет следующие функции: 1) фиксирует факт и место возникновения аварийного нарушения нормального режима и обеспечивает отделение повреждённого участка от неповреждённой части ЭЭС; 2) предотвращает распространение аварийного нарушения нормального режима на соседние неповреждённые участки энергосистемы (противоаварийная автоматика); 3) восстанавливает нормальный режим работы. Первую функцию выполняют устройства противоаварийного автоматического управления, фиксирующие возникновение в электроэнергетической системе КЗ и отключение повреждённого участка. К ним относятся УРЗ и УРОВ. Устройства автоматики, восстанавливающие нормальный режим работы. Третью функцию по восстановлению нормального режима выполняют сле-дующие устройства: автоматического повторного включения (АПВ) линий, трансформаторов, шин подстанций и электростанций, отключенных действием соответствующих УРЗ; автоматического включения резерва (АВР), восстанавливающие электроснаб-жение потребителей, потерявших питание в результате отключения рабочего источника питания; автоматического пуска резервных гидроагрегатов и ГТУ при аварийном сни-жении частоты, осуществляющие включение их в сеть и загрузку; автоматической загрузки работающих генераторов ТЭС, действующие при снижении частоты или при срабатывании устройств АПНУ и уменьшающие дефицит активной мощности. САОН – специальная автоматика отключения нагрузки Регулирующий эффект нагрузки. Изменение мощности нагрузки при изменении частоты и напряжения в свою очередь также оказывает влияние на параметры режима и это влияние принято называть регулирующим эффектом нагрузки соответственно по частоте и напряжению. При положительных коэффициентах наклона статических характеристик регулирующий эффект оказывает стабилизирующее влияние, то есть при переходе от одного установившегося режима к другому изменение напряжения и частоты будут меньше, чем они были бы при неизменной мощности нагрузок. При малых отклонениях частоты и напряжения коэффициенты kU(P) k U(Q) kf(P) всегда положительны. АВР: назначение, требования, классификация, принцип запуска. Назначение АВР Высокую степень надёжности электроснабжения потребителей обеспечивают схемы питания одновременно от двух и более источников (линий, трансформаторов), поскольку аварийное отключение одного из них не приводит к исчезновению напряжения на выводах электроприёмников. Несмотря на эти очевидные преимущества многостороннего питания потребителей, большое количество подстанций, имеющих два и более источников питания, работают по схеме одностороннего питания. Одностороннее питание имеют также секции собственных нужд электростанций. Применение такой менее надёжной, но более простой схемы электроснабжения во многих случаях оказывается целесообразным дня снижения значений токов К3, уменьшения потерь электроэнергии в питающих трансформаторах, упрощения релейной защиты, создания необходимого режима по напряжению, перетокам мощности и т.п. При развитии электрической сети одностороннее питание часто является единственно возможным, так как ранее установленное оборудование и релейная защита не позволяют осуществить параллельную работу источников питания. Используются две основные схемы одностороннего питания потребителей при наличии двух или более источников. В первой схеме один источник включен и питает потребителей, а второй отключен и находится в резерве. Соответственно этому первый источник называется рабочим, а второй — резервным (рис. 3.1, а б). Во второй схеме все источники нормально включены, но работают раздельно на выделенных потребителей. деление осуществляется на одном из выключателей (рис. 3.1, в, г).
1. Питание подстанции А (рис. 3.1а) осуществляется по рабочей линии 1 от подстанции Б. Вторая линия, приходящая с подстанции В. является резервной и находится под напряжением (выключатель Q3 линии 2 нормально отключен). При отключении линии 1 автоматически от устройства АВР включается выключатель Q3 и таким образом вновь подается питание потребителям подстанции А. Схемы АВР могут иметь одностороннее или двустороннее действие. При одностороннем АВР линия 1 всегда должна быть рабочей, а линия 2 – всегда резервной, и тогда АВР может действовать только на Q3. При двустороннем АВР любая из этих линий может быть рабочей и резервной, и тогда АВР может действовать как на Q3, так и на Q1. 2. Питание электродвигателей и других потребителей собственных нужд каждого агрегата электростанции осуществляется обычно от отдельных рабочих трансформаторов (Т1 и Т2 на рис. 3.1б). При отключении рабочего трансформатора автоматически от схемы АВР включаются Q5 и один из выключателей – Q6 (при отключении Т1) или Q7 (при отключении Т2) – резервного трансформатора Т3. 3. Трансформаторы Т1 и Т2 включены на разные системы шин (рис. 3.1в). Шиносоединительный выключатель Q5 нормально отключен. При аварийном отключении любого из рабочих трансформаторов автоматически от схемы АВР включается выключатель Q5, подключая нагрузку шин, потерявших питание, к оставшемуся в работе трансформатору. Если мощность одного трансформатора недостаточна дня питания всей нагрузки подстанции, при действии АВР должны приниматься меры дня отключения части наименее ответственных потребителей. 4. Подстанции В и Г (рис. 3.1г) нормально питаются радиально от подстанций А и Б соответственно. Линия 3 находится под напряжением со стороны подстанции В, а выключатель Q5 нормально отключен. При аварийном отключении линии 2 устройство АВР, установленное на подстанции Г, включает выключатель Q5, в результате чего питание с подстанции Г переводится на подстанцию В по линии 3. При отключении линии 1 подстанция В и вместе с ней линия 3 остаются без напряжения. Исчезновение напряжения на трансформаторе напряжения ТV также приводит в действие устройство АВР на подстанции Г, которое включением выключателя Q5 подаёт напряжение на подстанцию В от подстанции Г. Опыт эксплуатации показывает, что АВР является очень эффективным средством повышения надежности электроснабжения. Успешность АВР составляет 90–95%. Простота схем и высокая эффективность обусловили широкое применение АВР на электростанциях и в электрических сетях.
Классификация устройств АВР В энергосистемах применяется большое количество устройств АВР, отличающихся друг от друга в зависимости от конкретных условий работы и схем первичной коммутации. Устройства АВР можно классифицировать по следующим основным признакам: ¨ по типу оборудования, на которое действуют устройства – АВР трансформаторов, линий, секций сборных шин, агрегатов собственных нужд электростанций и подстанций: ¨ по направленности действия – АВР одностороннего и двустороннего действия: ¨ по виду источника питания устройств – АВР на постоянном или переменном оперативном токе; ¨ по виду резерва, включаемого действием устройства АВР, – АВР при наличии явного и неявного резерва. При наличии явного резерва резервный источник питания может находиться либо в отключенном состоянии, либо под напряжением, но без нагрузки. В случае неявного резерва нагрузка распределена между всеми источниками, которые осуществляют взаимное резервирование при отключении одного из них. При этом мощность каждого из источников должна быть достаточной для покрытия собственной нагрузки, а также всей или части нагрузки резервируемого источника.
Исходя из требований к АВР, главный пуск устройства АВР и подача команды на включение резервного источника производится от блок-контактов выключателя рабочего источника или соответственно от контактов реле положения «отключено» этого выключателя.
Вопросы к экзамену по «Автоматике электроэнергетических систем» (часть Осинцева А.А.) Противоаварийной автоматики Информационные параметры для построения ПА определяются в каждом случае конкретными условиями и конкретными задачами. Однако можно выделить наиболее типичные виды информации, которые используются в большинстве случаев [9]. 1. Информация о схеме и режиме энергосистемы в доаварийном состоянии. Схема в каждый момент времени может характеризоваться составом включенного оборудования, так как основная топология схемы практически не подвержена быстрому изменению. Электрический режим в доаварийном режиме определятся фактической загрузкой генераторов, перетоками мощности по ЛЭП, взаимными углами между векторами напряжений по концам каких-либо линий, уровнями напряжений. Информация о доаварийном режиме изменяется медленно, она должна как бы дежурить в управляющем устройстве в ожидании возмущения. Поэтому для сбора и передачи этой информации не требуется быстродействующей аппаратуры и быстродействующих каналов связи. 2. Информация о возмущениях. Типичным возмущением является отключение какого-либо элемента. При этом для ПА важно дополнить эту информацию о причинах отключения, а именно, отключение без КЗ или отключение в результате КЗ. Если отключение элемента произошло из-за КЗ и последующего действия РЗ, то требуется по каким-либо признакам оценить тяжесть КЗ. Тяжесть КЗ можно оценить по сбросу мощности генераторов при КЗ. Весьма представительной характеристикой тяжести КЗ является напряжение прямой последовательности. Это объясняется тем, что синхронный момент на валу генераторов определяется в основном именно составляющими прямой последовательности. 3. Информация об аварийном небалансе мощности, который может возникнуть из-за отключения генераторов, нагрузок или отделения участков энергосистемы с несбалансированной нагрузкой. Принципиально возникающий небаланс в первый момент времени можно оценить по ускорению движения роторов генераторов. ПО для АРОЛ Пусковые органы ПА (АРСП). 1. ПО на однофазном реле мощности, включенное на фазный ток и фазное напряжение. Недостатком схемы является возможность ложного срабатывания при несимметричных КЗ, поскольку ток при КЗ может быть значительным, реле мощности сработает, несмотря на пониженное фазное напряжение. Для предотвращения ложного действия ПА установлены реле напряжения KV2, включенное на фильтр напряжения обратной последовательности, и токовое реле нулевой последовательности КА0, срабатывающие и выводящие ПА из действия при несимметричных КЗ.
2. Другой вариант - ПО на трех однофазных реле мощности, включенные на фазный ток и фазное напряжение. Применение трех реле позволяет исключить ложные действия при несимметричных КЗ. Реле настроены на одинаковые уставки, а контакты их соединены последовательно. Условие срабатывание всех трех реле мощности может быть только при увеличении мощности до уставки срабатывания реле во всех фазах. При срабатывании по любой причине одного или двух реле мощности пуск ПА не происходит.
3. Иногда применяют ПО, которые реагируют на два параметра: мощность и напряжение. Реле минимального напряжения включены на междуфазное напряжение и имеют одинаковые уставки 0.8-0.9 Uн. При симметричном понижении напряжения до уставки реле находятся в сработанном состоянии и через промежуточное реле KL подготавливают цепь для пуска. Если при этом мощность также превышает уставку реле KW, то происходит пуск ПА на разгрузку.
Это - одноступенчатые ПО по мощности. Могут быть и двухступенчатые. Их достоинство – простота и быстродействие. Недостаток заключается в том, что они не выявляют тенденции изменения перетока мощности и поэтому могут сработать при синхронных качаниях и кратковременных неопасных повышениях мощности перетока до уставки (с последующим снижением). То есть – необходима задержка в действии ПО для фиксации устойчивого превышения мощности выше заданной уставки.
Для цепи АРСП выпускают комплексные устройства УПА1 и УПА2, выполненные на полупроводниковых интегральных схемах, построенные по касетно-модульному принципу и туда могут быть установлены статические однофазные датчики активной мощности, плато ОУ-сумматоров, реле напряжения, позволяющие осуществлять задержку появления (исчезновения) сигнала для фиксации текущего значения мощности, сброса или наброса мощности. Реле имеет пропорциональную и дифференцирующую цепь. Реле, реагирующее на скорость изменения мощности, отстраивается от возможных скоростей в нормальном режиме и при синхронных качаниях. Кроме того, применяются и специальные блокировки, действующие при качаниях и после отключения КЗ, а также при резких изменениях мощности, вызванных оперативными переключениями в сети. Недостатки: 1) трудно обеспечить требуемую чувствительность (приходится снижать уставки по Рср, что влечет излишние действия ПА); 2) необходимость оперативного изменения уставок при создании ремонтных схем, когда устанавливаются новые пониженные значения перетоков мощности.
ПО АРСП по углу 4.1. Непосредственное измерение угла
Лучше иметь ПО непосредственно измеряющий угол, потому что: 1. Угол 2. При утяжелении режима и последующим нарушением устойчивости угол 3. При непосредственном измерении угла
Схема, фиксирующая угол Угол
Основным элементом схемы является реле разности фаз напряжений, установленное со стороны передающей энергосистемы. К реле подводится напряжение непосредственно от ТН, измеряющего напряжение в начале линии U1. Напряжение в конце линии U2 передается в реле с помощью специальной аппаратуры передачи фазы напряжения, передатчик которой установлен в конце линии, а приемник в начале линии, соединяющей две энергосистемы. Реле настроено на определенную уставку Недостатки связаны со сложностью и невысокой надежностью передачи сигналов по ВЧ каналам. 4.2. Измерение угла с использованием модели электропередачи (фантомная схема) Схема, фиксирующая фазовый угол в линии, в которой отсутствует передача фазы напряжения, а напряжение шин приемной энергосистемы моделируется непосредственно в месте установки реле с помощью модели линии, в модели задается реактивное сопротивление между контролируемыми точками ЛЭП, равное сопротивлению линии и приведенное к вторичной стороне измерительных ТТ и ТН.
Т.о., для того чтобы в месте установки реле получить напряжение U2, нужно из вектора U1 вычесть вектор падения напряжения в сопротивлении линии от тока Iл.
Напряжение к реле подводиться от ТН своего конца, при этом одно из сравниваемых напряжений U1 подводится непосредственно, а второе U2 – через модель линии, к которой подводится вторичный ток линии от ТТ. Было разработано устройство ПА-501, включающее в себя измеритель угла d12, модель линии электропередачи. Недостатки: Необходимость перестройки модели при отключении одной из линий.
Назначение Для исключения возникновения асинхронного хода на генераторах, возникновения асинхронных качаний в сети и развала всей системы предназначена АЛАР, иногда именуемая АПАХ (название считается устаревшим).
Характерные признаки АР
Структурная схема АЛАР Устройств много, отличаются способами выявления АР и параметрами, на которые они реагируют. Есть устройства, реагирующие на изменение тока, мощности в линии электропередачи, напряжения на шинах подстанции, сопротивление на зажимах РС, комбинированные устройства. Требования – селективность, чувствительность к АР, быстродействие, способность определять знак скольжения. Ниже приводится разработка «Энергосетьпроекта», которая примерно удовлетворяет этим требованиям. Схема АЛАР сочетает в себе несколько признаков.
Измерительные органы – несколько реле сопротивления, реле активной мощности и счетчик циклов. Устройство имеет трехступенчатое исполнение. Первая – быстродействующая, выявляет АР на первом цикле (производит деление в начальной фазе). Первая ступень по своему принципу действия использует поочередное срабатывание двух реле сопротивления, имеющих разную чувствительность. Если после истечения времени не успело сработать второе реле сопротивления – отличительный признак АР. Вторая ступень – действует по истечении (2 – 4) циклов. Третья ступень – действует с дополнительной выдержкой времени (t2) после срабатывания второй ступени. Асинхронный режим выявляется путем фиксирования изменения ZР на зажимах реле сопротивления (РС), а также знака мощности электропередачи в этом режиме. Используются несколько комплектов РС и максимальное реле мощности KW1. Применение реле сопротивления обеспечивает повышенную чувствительность по сравнению с другими ПО, позволяет также определять сечение, где расположен ЭЦК. Контроль местоположения ЭЦК с помощью реле сопротивления производится для обеспечения селективности между устройствами АЛАР путем ограничения зоны их действия, за пределами которой должно действовать другое устройство АЛАР.
Первая ступень устройства. Необходимость действия на 1-м цикле возникает при АР, который сопровождается глубоки снижением напряжения, грозящим тяжелыми последствиями. Принцип действия основан на измерении скорости изменения ZР. Правда, первая ступень может отказать, если АР наступает с очень большим скольжением. Но тогда прекращение АР возлагается на вторую ступень. Вторая ступень. Реагирует на изменение ZР и знака мощности электропередачи. Возможны асинхронные режимы с ЭЦК, расположенном как в первом квадранте (т.е. на ВЛ, где включено устройство), так и в третьем т.е. за шинами подстанции). Поэтому в таком выявительном органе должны использоваться два РС, контакты которых включены параллельно. Третья ступень устройства применяется в том случае, если I-ая и II-ая ступень действуют на ресинхронизацию. В этом случае третья ступень их резервирует. Если в результате управляющих воздействий от первой и второй ступени АР не ликвидировался, третья ступень с выдержкой t2 действует на ДС. Выдержка t2 должна быть больше времени ресинхронизации, но меньше допустимого времени АР (10-20 с). По истечении t2 АР фиксируется по повторному срабатыванию II-й ступени. ЧАПВ – частотное АПВ
После срабатывания очередей АЧР-I и АЧР-II происходит восстановление час-тоты. В ряде энергосистем и районов имеется возможность после работы АЧР лик-видировать возникший дефицит путѐм мобилизации резервной мощности ГЭС с по-мощью устройств частотного пуска генераторов или перевода их из режима СК в режим выдачи активной мощности. В этих условиях целесообразно осуществить по-вторное включение потребителей, отключенных от АЧР. Для этих целей предназна-
чены устройства частотного автоматического повторного включения (ЧАПВ). По-
рядок подключения к ЧАПВ обратный по отношению к АЧР. Весь процесс ликвида-ции нарушения и восстановлении нормальной работы потребителей может занимать 1.5–2 минуты.
После восстановления частоты выше уставки fЧАПВ запускается выдержка вре-мени и срабатывает первая очередь ЧАПВ. Уставка по частоте ЧАПВ должна быть выше уставки запуска АЧР-II.
f
fЧАПВ
t
Вследствие объединения энергосистем на параллельную работу число рай-онов, получающих значительную часть мощности от ОЭЭС, существенно увеличи-вается, причѐм их питание зачастую осуществляется по одной – двум ЛЭП. Повреж-дения на этих линиях во многих случаях бывают неустойчивыми, что позволяет за короткое время ликвидировать дефицит мощности путѐм повторного включения ли-ний с помощью несинхронного АПВ (НАПВ) или АПВ с улавливанием синхронизма (АПВУС) с быстрым втягиванием в синхронизм. Возможны также случаи ресинхро-низации дефицитного района после действия АЧР (если питающая линия не отклю-чилась, а имело место нарушение синхронизма района). В этих условиях также це-лесообразно использовать ЧАПВ вместе с комплексом других противоаварийных мероприятий для быстрого автоматического восстановления питания потребителей, отключенных устройствами АЧР. К устройствам ЧАПВ должны подключаться:
Ø в первую очередь высокоответственные потребители, отключаемые последними устройствами АЧР;
Ø потребители, вероятность отключения которых при возникновении дефицита мощности наиболее велика (отключаемые первыми очередями АЧР);
Ø потребители, восстановление питания которых вручную после отключения их устройствами АЧР требует значительного времени (на подстанциях без постоянного дежурного персонала и телеуправления, расположенных на большом рас-стоянии от пункта размещения оперативных выездных бригад и т.п.).
Кроме того, ЧАПВ рекомендуется предусматривать при необходимости исправле-ния ложной работы устройств АЧР при кратковременных снижениях частоты при КЗ или в циклах АПВ и АВР.
Очерѐдность подключения потребителей к устройствам ЧАПВ обратна оче-рѐдности подключения к АЧР, т.е. потребители, подключенные к последним очере-дям АЧР, должны подключаться к первым очередям ЧАПВ. Как и в АЧР, объѐм по-требителей, подключѐнных к ЧАПВ, примерно равномерно распределяют по очере-дям.
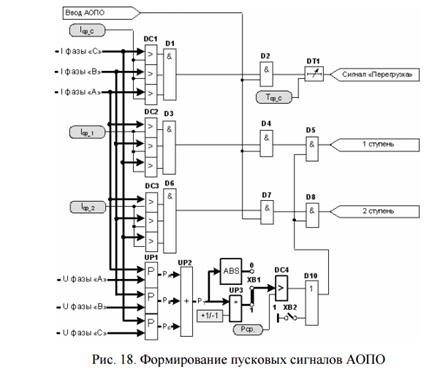
Частота после действия АЧР, как правило, восстанавливается до значений, близких к частоте возврата АЧР-II (48.5–49.5 Гц) или более высоких значений. Ус-тавки по частоте устройств ЧАПВ должны быть несколько выше, чем значения, до которых восстанавливается частота после работы АЧР. Таким образом, подъѐм час-тоты до уставок ЧАПВ говорит о том, что кроме действия АЧР в результате тех или иных мероприятий ликвидируется дефицит мощности, и возникают условия для по-вторного включения потребителей. Общие сведения Согласно [5] автоматическое ограничение перегрузки оборудования (АОПО) предназначено для предотвращения недопустимой по величине и длительности токовой нагрузки электрооборудования, которая может возникнуть в различных схемно-режимных ситуациях (отключение параллельных связей, потеря генерации, внезапный наброс нагрузки и т.д.). Под недопустимой перегрузкой элемента электрической сети понимается одновременное выполнение следующих условий: • превышение значения допустимой нагрузки оборудования по току; • превышение времени, в течение которого разрешена данная перегрузка по току. АОПО включает в себя автоматическую разгрузку трансформаторов, автотрансформаторов (АРТ) и автоматическую разгрузку линий электропередачи (АРЛ). Мероприятиями по ликвидации перегрузки являются: • разгрузка электростанций (разгрузка турбин, отключение генераторов); • перераспределение нагрузки; • пуск резервных агрегатов и набор нагрузки; • отключение нагрузки; • деление системы; отключение перегруженного оборудования. Для разгрузки связей в электрической сети ЭС в качестве УВ АОПО используются: • АВР (автоматический ввод резерва мощности) в дефицитной части энергосистемы для разгрузки связей (оборудования) с избыточным районом энергосистемы, • ОН в дефицитной части энергосистемы для разгрузки связей (оборудования) с избыточным районом энергосистемы, • ДРТ, ОГ генераторов электростанций в избыточной части энергосистемы для разгрузки связей (оборудования) с дефицитным районом энергосистемы, в случае наличии связей дефицитного энергорайона с другими источниками электроснабжения, • ДС, обеспечивающее перераспределение потоков мощности и ликвидацию перегрузки элемента сети или существенно повышающее эффективность действия других УВ. • отключение с запретом АПВ (для линий электропередачи) перегруженного элемента сети при условии, что при этом не возникнут недопустимые режимы в других частях энергосистемы, которые не могут быть предотвращены и ликвидированы средствами ПА. Алгоритм функционирования 1) Алгоритм формирования пусковых сигналов двухступенчатой АОПО приведен на рисунке 18.
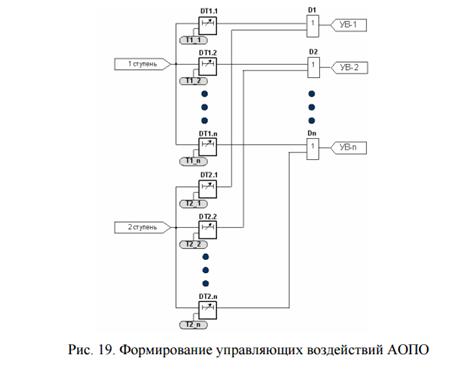
2) Алгоритм предусматривает формирование сигнала «Перегрузка» (элементы DC1, D1, D2) с выдержкой времени Тср_С, создаваемой таймером DT1. Пусковые сигналы рабочих первой и второй ступеней формируются соответственно компараторами DC2 (уставка срабатывания Iср_1) и DC3 (уставка срабатывания Iср_2), а также элементами D3÷D8. Элементы D1, D3 и D6 обеспечивают формирование пусковых сигналов только в симметричных перегрузочных режимах. Элементы D2, D4 и D7 предназначены для оперативного ввода и вывода устройства. Элементы D5 и D8 обеспечивают управление АОПО по признаку направления активной мощности. 3) Орган направления мощности (ОНМ) состоит из трех элементов UP1, осуществляющих пофазное вычисление активной мощности, сумматора UP2, на выходе которого формируется значение трехфазной мощности. Элемент UP3 позволяет менять знак вычисленной мощности, тем самым меняя направленность ОНМ. Элемент АВS вычисляет модуль мощности. Компаратор DC4 при достижении мощностью заданной уставки формирует разрешающий сигнал для рабочих ступеней АОПО. Программный ключ ХВ1 позволяет включать (положение «1») или отключать (положение «0») направленность, оставляя рабочие ступени АОПО под контролем мощности. Включение программного ключа ХВ2 отключает ОНМ. 4) Алгоритм формирования управляющих воздействий ступенчатой АОПО приведен на рисунке 19.
5) Каждая рабочая ступень АОПО своими пусковыми сигналами запускает таймеры с раздельным регулированием выдержек времени. Выдержки времени обеспечивают: — отстройку от симметричных коротких замыканий; — согласование длительности существования перегрузки с ресурсом контролируемого оборудования по перегреву; — последовательность управляющих воздействий и временные интервалы между ними. Вопросы к экзамену по «Автоматике электроэнергетических систем» (часть Купарева М.А.) Основные отличия автоматики энергосистем от релейной защиты. Первоначально автоматические устройства применялись в энергетике главным образом для выполнения функций защиты электроэнергетических объектов от действия сверхтоков, возникающих в момент повреждения. Процессы, возникающие при этом, – это электромагнитные переходные процессы, а автоматические устройства, предназначенные для защиты от влияния этих процессов, – это устройства релейной защиты. Параллельно с развитием релейной защиты энергосистем в ни<   Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 Недостатком одностороннего питания является то, что аварийное отключение рабочего источника приводит к прекращению питания потребителей. Этот недостаток можно устранить быстрым автоматическим включением резервного источника или включением выключателя, на котором осуществлено деление сети. Для выполнения этой операции широко используются специальные устройства, получившие название устройств автоматического включения резерва (АВР). Рассмотрим принципы использования АВР на примере схем, приведенных на рис. 3.1.
Недостатком одностороннего питания является то, что аварийное отключение рабочего источника приводит к прекращению питания потребителей. Этот недостаток можно устранить быстрым автоматическим включением резервного источника или включением выключателя, на котором осуществлено деление сети. Для выполнения этой операции широко используются специальные устройства, получившие название устройств автоматического включения резерва (АВР). Рассмотрим принципы использования АВР на примере схем, приведенных на рис. 3.1. позволяет лучше характеризовать запас по статической устойчивости во всех режимах работы. При использовании мощности можно оценить запас статической устойчивости только при соответствии фактического состояния схемы и параметров режима принятым в расчетах.
позволяет лучше характеризовать запас по статической устойчивости во всех режимах работы. При использовании мощности можно оценить запас статической устойчивости только при соответствии фактического состояния схемы и параметров режима принятым в расчетах.
 , и если фазовый угол в линии достигает
, и если фазовый угол в линии достигает 

 .
.