
|
|
ТИ – постоянная интегрирования параметры настройки регулятораТД - постоянная дифференцирование Задача синтеза: определение этих параметров.
Если для интегрирования использовать метод трапеции, то коэффициенты следующие:
Для больших тактов управления рассмотренный способ дискретизации управление непрерывного регулятора является непрерывным. При этом можно получить неустойчивое разностное уравнение. В этом случае для дискретного представления регуляторов используется дискретная передаточная функция. Обобщенная дискретная передаточная функция регулятора n-го порядка:
Где g0=Kп(1 + Tд/T0), g1= -Kп(1 + 2Tд/T0 – T0/Tи), g2= Kп* Tд/T0.
Ти - постоянная времени интегрирования параметры настройки регулятора. Тд - постоянная времени дифференцирования Т0-такт управления. Пусть n=1- регулятор 1 порядка. ДПФ - Получим разностное уравнение:
Если n=2, то ПИД - регулятор 2 порядка. ДПФ – Получим разностное уравнение:
Если n=3, то ПИДД2 - регулятор 3 порядка. ДПФ – Получим разностное уравнение:
Разностное уравнение n - го порядка:
Если n=3, то П - регулятор 0 порядка. ДПФ –
Модифицированные ПИД - регуляторы При резком изменении задающего воздействия, управляющее воздействие оказывается большим за счет Д-составляющей, что приводит к нежелательному росту величины регулирования. Вернемся к разностному уравнению ПИД – регулятора: U(k)=U(k-1)+ Kn*(ε(k)-ε(k-1)+(To/Tи)*ε(k-1)+(Tg/To)*(ε(k)-2ε(k-1)+ε(k-2))), где (Kn*(ε(k)-ε(k-1)) - пропорционная составляющая ((To/Tи)*ε(k-1)) - интегральная составляющая ((Tg/To)*(ε(k)-2ε(k-1)+ε(k-2)) - дифференциальная составляющая Устранить резкие изменения U(k) можно путем использования в дифференциальной составляющей вместо ε(k) величину -y(k): U(k)-U(k-1)= Kn*(ε(k)-ε(k-1)+(To/Tn)*ε(k-1)+(Tg/To) * (-y(k)+2y(k-1)-y(k-2))) Дальнейшее уменьшение величины управляющего воздействия значения ошибки можно только в пропорциональной составляющей (замена ошибки на y(k) в П - составляющей): U(k)-U(k-1)= Kn*(у(k)-у(k-1)+(To/Tn)*ε(k-1)+(Tg/To) * (-y(k)+2y(k-1)-y(k-2))) Структурно – оптимизируемые регуляторы
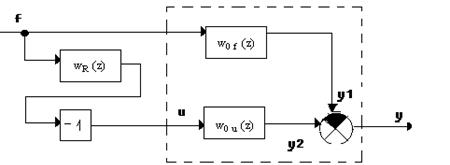
Если возмущающее воздействие, поступающее на объект управления можно измерить, то качество управления можно улучшить, если использовать регулятор с прямой связью (применяя разомкнутую систему). В таких системах одновременно с изменением возмущающего воздействия происходит изменение управляющего сигнала, что позволяет осуществить компенсацию действия возмущений до того, как они скажутся на изменении регулируемой величины у. Рассмотрим САУ с нулевым задающим воздействием, т.е. выход необходимо стабилизировать на 0 уровне. Структура такой системы имеет вид:
Для того чтобы y = 0 необходимо чтобы y1=y2. Для обеспечения этого необходимо:
В тех случаях, когда необходимо обеспечить
Постоянное управляющее воздействие Все отклонение от этого значения будут компенсироваться регулятором в зависимости от возмущений.
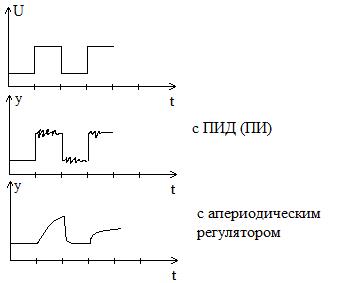
Апериодический регулятор В отличие от непрерывных, цифровые регуляторы позволяют устранять внештатные колебания, то есть установить заданное качество управления только в тактовые моменты времени. Между тактами могут возникать колебания регулируемой величины:
Устранить внештатные колебания можно путем обеспечения апериодического характера переходного процесса. Пусть
… …
  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 ,
, Кп - коэффициент пропорциональности
Кп - коэффициент пропорциональности , где
, где  .
. ;
; .
. по теореме о смещении
по теореме о смещении  следует, что
следует, что - ПИ – регулятор 1 порядка.
- ПИ – регулятор 1 порядка. , где
, где  ;
; - ПИД – регулятор 2 порядка.
- ПИД – регулятор 2 порядка. , где
, где  .
. - ПИДД2 – регулятор 3 порядка. Данный регулятор учитывает ускорение (скорость изменения скорости).
- ПИДД2 – регулятор 3 порядка. Данный регулятор учитывает ускорение (скорость изменения скорости). .
. ;
; .
.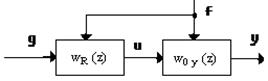
 - ПФ ОУ по возмущению
- ПФ ОУ по возмущению  - ПФ ОУ по управлению
- ПФ ОУ по управлению следовательно:
следовательно: 
 используется следующая система:
используется следующая система: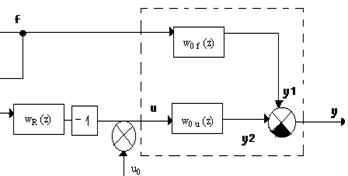
 обеспечивает требуемое значение выхода на у.
обеспечивает требуемое значение выхода на у. .
.
 , тогда апериодический характер будет обеспечиваться регулятором:
, тогда апериодический характер будет обеспечиваться регулятором:  .
. ;
; ;
;  ;
; ;
;  ;
; .
.  .
.