
|
|
Раздел 3. Интегрированные системы ориентации и навигации (ИСОН)Стр 1 из 9Следующая ⇒ Раздел 3. Интегрированные системы ориентации и навигации (ИСОН) Л.10. ИСОН – перспектива развития навигационного оборудования подвижных объектов Содержание
- внутрисистемные интерфейсы БИИМ - интерфейсы взаимодействия БИНС и ИСОН с внешними устройствами
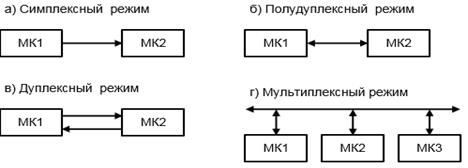
Интерфейсы Современные достижения в области развития микроэлектроники и микропроцессорной техники определили широкое распространение микропроцессорных устройств практически во всех областях техники. В настоящее время можно отметить массовое внедрение таких устройств и в навигационном приборостроении, в частности, в области создания ПА СНС, инерциальных чувствительных элементов и построенных на их основе бескарданных инерциальных модулей. При создании интегрированных навигационных систем на основе БИИМ и ПА СНС, построение которых на современном этапе их развития во всё большей степени связано с реализацией принципа агрегирования [91], как и в любой другой сложной системе, функционирующей при взаимодействии с внешней средой, необходимо наличие инструментария, обеспечивающего взаимодействие (сопряжение) отдельных модулей. Причем, как внутри самих навигационных измерителей и ИСОН в целом, так и с конечными потребителями навигационной информации. В качестве такого инструментария в настоящее время в большинстве случаев выступают соответствующие цифровые интерфейсы приёма/передачи данных. Под интерфейсом подразумевается совокупность механических, электрических и программных средств, позволяющих объединять отдельные модули в систему [91] и обеспечивать их взаимодействие друг с другом и в составе системы – с внешней средой. Взаимодействие устройств при существующих топологиях построения передачи ими данных друг другу может производиться в одном из трёх режимов [30,34]: - симплексный - используется, когда передача данных должна осуществляться только в одном направлении, например в системах контроля, в которых информация с датчиков передается в управляющий компьютер через регулярные промежутки времени; - полудуплексный - применяется, когда два взаимодействующих объекта хотят обмениваться информацией поочередно, т.е. канал используется поочередно для передачи данных в обоих направлениях. Ясно, в таком режиме каждый объект должен иметь возможность переключаться от состояния передачи к состоянию приёма; - дуплексный (полнодуплексный) - используется для обмена данными между двумя взаимодействующими объектами (устройствами) в обоих направлениях одновременно, например, когда пропускная способность канала позволяет потоку данных осуществляться в обоих направлениях независимо. Расширением дуплексного режима, при котором взаимодействие осуществляется в соответствии с принципом точка-точка, является мультиплексный режим, обеспечивающий одновременный приём и передачу данных между несколькими абонентами (устройствами). Схематично организация обмена данными при работе в указанных режимах приведена на рис.1.2.1 [33].
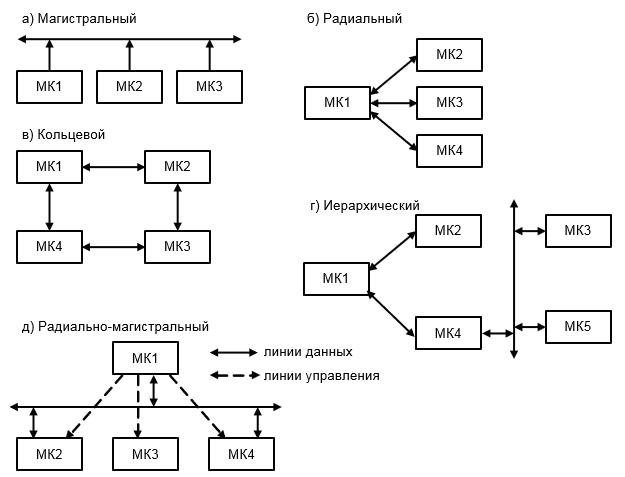
Рис. 1.2.1 Структура интерфейсов с различными режимами взаимодействия потребителей (абонентов) (МКi – i-ый микроконтроллер, непосредственно осуществляющий приём/передачу данных i-го устройства) При необходимости обмена данными между тремя и более устройствами возможны следующие варианты топологий интерфейсов сетевого взаимодействия: магистральные интерфейсы, радиальные (сеть звезда), кольцевые, иерархические, радиально-магистральные (рис. 1.2.2).
Рис. 1.2.2 Топологии интерфейсов при организации сети взаимодействующих устройств
Следует отметить, что на уровне встраиваемых микропроцессорных систем обычно приходится иметь дело с первым или вторым вариантом, причем для локальных сетей используется преимущественно магистральная структура, а для интерфейса периферийных устройств – как первый, так и второй варианты. В настоящее время существует множество проверенных и хорошо зарекомендовавших себя промышленных интерфейсов, разработкой которых в целях их широкого внедрения в промышленность (автомобильную, создание портативных устройств и др.) занимаются главным образом ряд зарубежных фирм Bosh, Simens, Xeros, IBM и ряд других. Регулированием и стандартизацией применения тех или иных интерфейсов на отраслевом уровне занимается ряд организаций [30]: CCITT (Consultative Committee on International Telephony and Telegraphy, Международный телеграфный и телефонный консультативный комитет - МККТТ), в английской нотации называемый ITU-T (International Telecommunications Union - Technical Standards Sector, Международный телекоммуникационный союз - Сектор технических стандартов) - это международная организация, создающая стандарты для телекоммуникаций, EIA (Electrical Industry Association - Ассоциация электрической промышленности), NMEA («National Marine Electronics Association»), IEC (International Electrotechnical Commission, Международная электротехническая комиссия). Их проекты являются основными рекомендациями для всех остальных в этой области. Например рекомендации, которые относятся к применениям модемов, имеют префикс «V» и называются рекомендациями серии V (интерфейсы RS 232 и многие др). Разработки в области создания промышленных интерфейсов ряда фирм нашли широкое применение в том числе и в навигационном приборостроении в силу обеспечения ими заданных показателей надёжности, скорости и объёмов передачи данных. Так, например, для систем военного назначения [118] обмен данными между потребителями осуществляется в соответствии со стандартами ГОСТ 18977-79 (РТМ 1495-75), ГОСТ 26765-52.87, ГОСТ Р 52070-2003, MIL-STD-1553B (в морской практике) и положениями документов ARINC743, ARINC429 (в авиации), RS232, RS422. Далее рассмотрим организацию взаимодействия в БИИМ, ПА СНС, БИНС (инерциальная система самостоятельной поставки, не входящая в состав ИСОН) и ИСОН на примере конкретной продукции ряда мировых лидеров в области навигационного приборостроения. ИСОН SEAPATH 400 Интегрированная система ориентации и навигации для морских судов SEAPATH 400, разработанная фирмой “SEATEX” (Норвегия), является высокоточной и надежной системой, вырабатывающей данные о курсе, углах и угловых скоростях качки и рыскания, линейной скорости и координатах местоположения судна (рис.1.4.2) [http:\\www.seatex.no].
Рис.1.4.2. Интегрированная система ориентации и навигации для морских судов SEAPATH 400
Система SEAPATH 400 включает ПА СНС DGPS с четырьмя разнесенными антеннами, обеспечивающую дифференциальный режим работы и фазовые интерферометрические измерения, а также бескарданный инерциальный измерительный блок “Seatex MRU-5” на дешевых малогабаритных кварцевых гироскопах вибрационного типа. По данным фирмы точность системы SEAPATH 400 составляет в настоящее время в определении курса и параметров ориентации около 0,05 град. (1 Измерительный блок “Seatex MRU” был разработан фирмой в начале 90-х годов, включает в полной комплектации три гироскопа, три линейных акселерометра, три феррозонда и обеспечивающую электронику (рис.1.4.3).
Рис.1.4.3. Измерительный блок “Seatex MRU”
Технические данные измерительного блока MRU-5 и 6: Диапазон измерений: по углу неограничен; по угловой скорости 150 град./с; по линейному ускорению 30 м/c2; Частота измерений 200 Гц; Точность измерений: · по угловой скорости в диапазоне частот качки и рыскания
· по линейному ускорению 2% от измеряемой величины; Среднее время наработки на отказ 50000 ч; Массогабаритные характеристики · размеры · масса 2,5 кг.
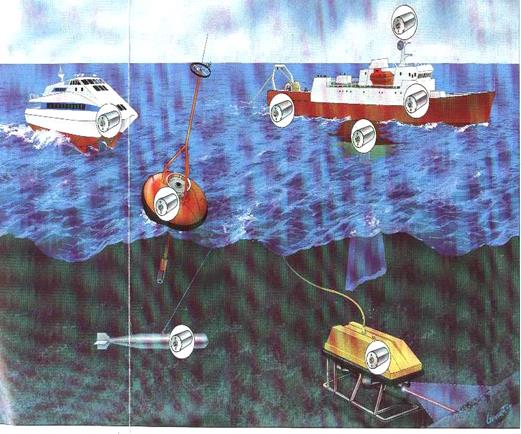
Измерительный блок “Seatex MRU” используется на различных морских подвижных объектах (Рис.1.4.4).
Рис.1.4.4. Возможные варианты использования измерительного блока “Seatex MRU”
Технические характеристики системы SEAPATH 400: Погрешности выработки · курса и углов качки 0,05 град. (1 · координат местоположения 3…5 м (2 · приращений плановых координат < 0,05 м (1 · линейной скорости 0,03 м/с (1 Внешний интерфейс · Вывод данных 4 линии RS232/RS422 · Скорость передачи 38,4 kБод · Интервал уточнения данных 0,01 с, 0,02 с, 0,03с · Форматы вывода сообщения Seatex Binary, Simrad EM1000, NMEA 0183, Заказной · Ввод данных 2 линии RS232/RS422 · DGPS коррекция RTCM-104 Версия 2.0 · Гирокомпас NMEA 0183, Robertson Электропитание · напряжение 24 В постоянный ток +25% · потребляемая мощность 75 Вт Массогабаритные характеристики · процессорный блок · антенный блок Рабочая температура · процессорный блок от 00C до + 400C · измерительный блок от -50C до + 550C · антенный блок от -200C до + 550C Современное состояние ЭКНИС Современные ЭКНИС отличают следующие определяющие моменты: использование той или иной версии операционной системы Windows, когда на экране монитора в одном из окон можно увидеть фрагмент одной карты, а в другом - другой, причем даже в ином формате; наложение на ЭНК радиолокационной информации. При этом в некоторых системах на ЭНК выводится лишь информация о целях («вторичная»), а в некоторых - и первичная, идентичная информации на индикаторе кругового обзора радара; сопряжение с авторулевым для решения задачи удержания судна на курсе или линии заданного пути с учетом динамических характеристик судна; наличие в базе данных ЭКНИС сведений о приливах, отливах и течениях на район плавания (либо модели, позволяющей их рассчитывать), что резко упрощает плавание в прибрежной зоне, а также позволяет выбрать оптимальный маршрут движения; включение в состав аппаратуры ЭКНИС интерфейсного модуля для сопряжения с системой INMARSAT, обеспечивающей глобальную связь. Именно такие функции заложены, например, в систему Sea Pro 2000 фирмы Euronav Ltd. (Великобритания). При этом пока ИМО решает судьбу векторных и растровых карт, большинство передовых производителей идет по понятному пути обеспечения работы ЭКНИС с картами разных форматов. Так, например, американо-германская фирма “Raytheon Marine Company - Raytheon Anschutz GmBH” разработала ST MK 2ECDIS, работающую как с векторными картами (форматы S57/DX-90 [ИМО], DNC VPF [NIMA], С-93 [С-МАР]), так и с растровыми (форматы ARCS [Великобритания], BSB [США], SRF [Австралия]). Эта ЭКНИС кроме радара, радиолокационного прокладчика и авторулевого, упоминавшихся ранее, сопрягается с эхолотом, приемником GPS (в том числе работающим в дифференциальном режиме), гирокомпасом, лагом, датчиком ветра, датчиком оборотов судового двигателя, датчиком пера руля и датчиком скорости поворота судна. Легко понять, что такая ЭКНИС позволяет решать практически все задачи навигации и управления движением судна. К такому же классу ЭКНИС относится и система Tsunamis, предлагаемая фирмой “Software” (Великобритания), являющейся дочерней по отношению к фирме “Transas Marine”. Фирма “Software” обладает собственной коллекцией из 3500 векторных ЭНК, хранимых на компакт-диске. В этой ЭКНИС обеспечивается сопряжение с приемником GPS по каналу NMEA для ввода в него маршрута движения судна, а также имеется графический семицветный редактор, позволяющий выносить на экран монитора любую дополнительную (к хранящейся в базе ЭНК) информацию. Целый ряд фирм выпускает проблемно-ориентированные ЭКНИС. Так, фирма “Cetrek Ltd.” (Великобритания) разработала систему Pro Chart для рыбопромысловых судов. Эта система отображает на экране монитора траекторию не только судна на фоне ЭНК, но и трала, и имеет три режима поиска «цели» (косяка рыбы) по данным гидролокатора. Фирма “Simrad Shipmate AS” (Дания) выпускает систему Shipmate RS2900, сопрягаемую с различными системами позиционирования (GPS, Loran-C, Decca и т.д.) и позволяющую индицировать на фоне ЭНК путь судна по пяти любым из них. Более того, линия пути судна может менять свою окраску в зависимости от диапазонов глубин или температуры воды, что опять-таки существенно для рыбаков. Интересную разработку CAN Star 3000 провела фирма “Computer Aided Navigation” (ФРГ). В этой системе реализуется псевдотрехмерное изображение на экране целей от радиолокационного прокладчика, имитирующее их наблюдение через лобовое стекло ходовой рубки. При этом окраска целей меняется в зависимости от того, каким бортом они обращены к наблюдателю («правый - зеленый»). На экран, где автоматически индицируется кривая глубины под килем за последние 5 мин, выводится информация от теле- или видеокамеры (можно наблюдать за машинным отделением или палубой). Имеется и задача контроля за положением судна на якорной стоянке при вводе данных от датчика ветра. ЭКНИС Navmaster разработала фирма “PC Maritime Ltd.” (Великобритания). В системе реализованы мультимедийные возможности: в базе данных ЭКНИС можно хранить фотографии, комментарии и видеокадры, привязанные к маршруту, которые могут быть выведены поверх ЭНК. ЭКНИС использует векторные и растровые карты, причем коллекция растровых карт в формате ARCS покрывает весь Мировой океан и размещается на 11 компакт-дисках, каждый из которых вмещает 350 карт. Еженедельно фирма выпускает компакт-диск с корректурами для всей коллекции карт. Наконец, система способна принимать выводимую на экран карту погоды, а также извещения мореплавателям о навигационных опасностях. Как отмечалось ранее, новейшие ЭКНИС представляют собой основу интегрированного мостика на современном судне. Поэтому многие фирмы разрабатывают разнообразные пакеты прикладных программ, которые могут быть реализованы в вычислителе ЭКНИС. Так, фирма “Litton” (США), поглотившая недавно широко известную компанию “Sperry Marine Inc.”, выбросила на рынок целый ряд разработок вновь созданной Litton Marine Systems. Наиболее интересными из них являются: «черный ящик», осуществляющий запись комплексной информации, речевых команд и информации с экрана радара для разбора несчастных случаев и тренировки экипажа; система контроля качества работы судового оборудования. Используя данные на сервере «черного ящика», этот модуль оценивает «настройку» параметров судового двигателя, качество топлива, погодные условия и прочность корпуса, сопоставляя их со «стандартными», заложенными при испытаниях судна и тестировании его модели. Результаты используются для подтверждения эффективности работы систем энергосбережения судна, определения оптимального интервала между осмотрами судна в сухом доке и т.д.; система поддержки принятия решений (экспертная система) рассчитывает оптимальные скорость и курс судна, минимизирующие риск повреждения от штормов, уменьшает стоимость жизненного цикла корпуса и механизмов, прогнозирует слеминг, изгибающий момент, перерезывающую силу, скорость и число оборотов двигателя в соответствии с прогнозом погоды или ручным вводом данных о погодных условиях и параметров волнения. И, как подобает всякой экспертной системе, дает ответы на многочисленные сценарии типа «Что если?». В России одним из ведущих разработчиков ЭКНИС для МПО является АО “Транзас Марин” (г. Санкт-Петербург). Продукция этой фирмы в настоящее время получила широкое распространение как на отечественных судах, так и на судах иностранных компаний. В соответствии с международными нормами о безопасности плавания системы отображения электронных карт должны стать обязательной составной частью судовых навигационных систем. ЛИТЕРАТУРА
1. Аванесов Г.А., Форш А.А, Бессонов Р.В. и др. Звёздный координатор БОКЗ-М и перспективы его развития.- XIV Санкт-Петербургская международная конференция по интегрированным навигационным системам. С.-Пб, Россия. Сб. материалов, 28-30 мая, 2007. –С.199-205. 2. Андреев В.Д. Теория инерциальной навигации. Кн.I. Автономные системы. Кн. II. Корректируемые системы. - М.: Наука, 1966, 1967. 3. Анучин О.Н., Емельянцев Г.И. Интегрированные системы ориентации и навигации для морских подвижных объектов (2-е изд., допол.). СПб: ЦНИИ „Электроприбор“, 2003. 390с. 4. Анучин О.Н., Каракашев В.А., Емельянцев Г.И. Влияние геодезических неопределенностей на погрешности инерциальных систем//Судостроение за рубежом. -1982. - № 5(185). 5. Анучин О.Н., Емельянцев Г.И. О влиянии угловых колебаний объекта на точность и время выставки по курсу интегрированной системы ориентации и навигации.//Гироскопия и навигация. -1997, № 3, с.7-14. 6. Анучин О.Н., Комарова И.Э., Порфирьев Л.Ф. Бортовые системы навигации и ориентации искусственных спутников Земли. СПб.: ЦНИИ «Электроприбор», 2004. – 325с. 7. Аншаков Г.П., Макаров В.П., Мантуров А.И., Мостовой Я.А. Методы и средства управления в высокоинформативном наблюдении Земли из космоса. - XIV Санкт-Петербургская международная конференция по интегрированным навигационным системам. С.-Пб, Россия. Сб. материалов. 28-30 мая 2007 г. - С.165-173. 8. Аппаратура радионавигационная систем ГЛОНАСС и GPS. Системы координат. Методы перевычислений координат определяемых точек. Государственный стандарт РФ, Госстандарт России, 2001. 9. Атаманов Н.А., Троицкий В.А., Гусев И.В. Калибровка блока чувствительных элементов БИНС. Материалы XII Санкт-Петербургской международной конференции по интегрированным навигационным системам, 2005 г, стр. 162-164. 10. Бакитько Р.В., Булавский Н.Т., Горев А.П. и др. ГЛОНАСС. Принципы построения и функционирования/ Под ред. А.И. Перова, В.Н. Харисова. Изд. 3-е перераб. – М.: Радиотехника, 2005. -688с. 11. Бендат Дж., Пирсол А. Прикладной анализ случайных данных. -М.: Мир, 1989. 12. Бернелли-Заццера, Ф. Недорогое оборудование для определения ориентации университетского спутника PalaMede по сигналам GPS / Ф. Бернелли-Заццера, М. Молина, М. Ванотти // Гироскопия и навигация. – 2001. - № 4. - 73-82. 13. Биндер Я.И., Блажнов Б.А., Емельянцев Г.И., Кошаев Д.А., Старосельцев Л.П., Степанов О.А.. Анализ возможности азимутальной выставки скважинных гироинкли-нометров в высоких широтах// Гироскопия и навигация.- 2013. -№3(82). - С. 14-24. 14. Блажнов Б.А., Несенюк Л.П., Пешехонов В.Г., Старосельцев Л.П. Миниатюрная интегрированная инерциальная/ спутниковая система навигации и ориентации//Гироскопия и навигация. -1998. - № 1. - С.56-62. 15. Блажнов Б.А., Волынский Д.В., Емельянцев Г.И., Несенюк Л.П., Степанов А.П. Интегрированная инерциально-спутниковая система ориентации и навигации с микромеханическим инерциальным модулем. Результаты испытаний на автомобиле// Гироскопия и навигация.- №4(63), 2008. c.77. 16. Блажнов Б.А., Емельянцев Г.И., Коротков А.Н., Кошаев Д.А., Семенов И.В., Степанов А.П. и др. Интегрированная инерциально-спутниковая система ориентации и навигации, построенная по сильносвязанной схеме. XVI Санкт-Петербургская международная конференция по интегрированным навигационным системам, сборник материалов. 2009. С. 153-162. 17. Блажнов Б.А., Кошаев Д.А. Определение относительной траектории движения и углов ориентации по фазовым спутниковым измерениям и данным микромеханического гироскопа //Гироскопия и навигация.-2009.-№4(67). –С. 15-33. 18. Блажнов Б.А., Емельянцев Г.И., Коротков А.Н., Степанов А.П. и др. Интегрированная инерциально-спутниковая система ориентации и навигации для объектов, движущихся по баллистической траектории с вращением вокруг продольной оси. Патент РФ RU 2375680 от 10.12.2009 г. 19. Блажнов Б.А., Волынский Д.В., Емельянцев Г.И., Степанов А.П. и др. Интегрированная инерциально-спутниковая система ориентации и навигации. Патент РФ RU 2462690 от 27.09.2012 г. 20. Блажнов Б.А., Евстифеев М.И., Емельянцев Г.И., Степанов А.П. и др.. GPS-компас с автономным режимом работы. Результаты объектовых испытаний. 20th Saint Petersburg International Conference on Integrated Navigation Systems, 27…30May, 2013, S.-Peters-burg, Russia, s. 99-103. 21. Блажнов Б.А., Волынский Д.В., Емельянцев Г.И., Радченко Д.А., Степанов А.П. и др. Интегрированная инерциально-спутниковая система ориентации и навигации для морских объектов. Патент РФ RU 2 523 670 от 20.07.2014 г. 22. Блажнов Б.А., Кошаев Д.А., Петров П.Ю. Приведение показаний угломерной двухантенной спутниковой аппаратуры к связанной с инерциальным модулем системе координат // Материалы XXI Санкт-Петербургской международной конференции по интегрированным навигационным системам. - СПб. 26…29 Maй, 2014. С. 65-69. 23. Болдин В.А., Зубинский В.И.,Зурабов Ю.Г. и др. Глобальная спутниковая радионавигационная система ГЛОНАСС.- М.: ИПРЖР, 1998.-400 с. 24. Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем.- М.:Наука. Гл. ред. физ.-мат.лит., 1992. -280 с. 25. Бромберг П.В. Теория инерциальных систем навигации.- М.: Наука, 1979. 26. Брок А., Шмидт Я. Статистическая оценка в системах инерциальной навигации// Вопросы ракетной техники.-1967.- № 1. 27. Буравлев А.П., Ландау Б.Е., Левин С.Л. О модели дрейфа ЭСГ для БИНС//Судостроительная промышленность. -1992. - № 30. 28. Водичева Л.В., Алиевская Е.Л., Кокщаров Е.А., Парышева Ю.В. Повышение точности определения угловой скорости быстровращающихся объектов. //Гироскопия и навигация.-2012.-№1(76). -С. 27…41. 29. Волынский Д.В., Драницина Е.В., Одинцов А.А., Унтилов А.А. Калибровка волоконно-оптических гироскопов в составе бескарданных инерциальных измерительных модулей// Гироскопия и навигация. - 2012, №2(77), c.56-68. 30. Галкин В.А., Григорьев Ю.А. Телекоммуникации и сети: Учеб. пособие для вузов. - М.: Изд. МГТУ им. Н.Э. Баумана, 2003. - 608 с. 31. Глобальная спутниковая радионавигационная система ГЛОНАСС./Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина. - М.:ИПРЖР, 1998. 32. ГЛОНАСС. Интерфейсный контрольный документ (ред. 5.1). Российский НИИ космического приборостроения. -2008. 33. Горюнов А.Г., Ливенцов С.Н., Чурсин Ю.А. Интерфейсы микропроцессорных систем. Изд. Томского политехнического университета. - 2010. – 51 с. 34. Гук М.Ю. Аппаратные средства IBM PC. Энциклопедия. 3-е изд. – СПб.: Питер, 2006. -1072 с. 35. Гусинский В.З., Литманович Ю.А. Повышение точности определения угловой ориентации космического аппарата путем совместной обработки данных электростатических и волоконно-оптических гироскопов// Гироскопия и навигация.- 2003.- №4(43)- С.50-58. 36. Дишель В.Д., Быков А.К. и др. Анализ результатов первого летного испытания интегрированной инерциально-спутниковой системы навигации, ориентации и траекторного контроля ракеты-носителя и разгонного блока при выведении космического аппарата «Амос-2» на геостационарную орбиту. Материалы XI Санкт-Петербургской международной конференции по интегрированным навигационным системам. //Гироскопия и навигация.-2004.-№3(46), с. 80). 37. Дмитриев С.П. Высокоточная морская навигация. - СПб.: Судостроение, 1991. 38. Дмитриев С.П., Шепель С.В., Мамонтова А.В. Использование инерциальных датчиков при управлении движением судна// Гироскопия и навигация.-1993.-№ 1.-С.32-37. 39. Дмитриев С.П. Инерциальные методы в инженерной геодезии. – 1997.- 208 с. СПб. ГНЦ РФ - ЦНИИ "Электроприбор". 40. Дмитриев С.П., Степанов О.А., Кошаев Д.А. Многоканальная фильтрация и ее применение для исключения неоднозначности при позиционировании объектов с помощью GPS // Известия РАН. Теория и системы управления. – 1997. - № 1. – С. 65-70. 41. Дмитриев С.П., Степанов О.А. Неинвариантные алгоритмы обработки информации инерциальных навигационных систем// Гироскопия и навигация. 2000. -№ 1 (28). -С. 24-38. 42. Дмитриев С.П., Степанов О.А. Многоальтернативная фильтрация в задачах обработки навигационной информации. Радиотехника. 2004. № 7. С. 11-17. 43. Дмитриев С.П., Осипов А.В. Фильтрационный подход в задаче контроля целостности спутниковой навигационной системы. Марковская теория оценивания в радиотехнике. – М. Радиотехника, 2004. – с.425…439. 44. Емельянцев Г.И., Алексеев С.П. Об интеграции информационного обеспечения задач навигации, стабилизации и управления движением морских подвижных объектов//Навигация и гидрография. -1996. - № 2. - С.73-76. 45. Емельянцев Г.И., Анучин О.Н., Гусинский В.З. Интегрированные системы ориентации и навигации для кораблей и морских судов//Навигация и гидрография. -1998. - № 6. 46. Емельянцев Г.И., Старосельцев Л.П., Игнатьев С.В. О румбовых дрейфах бескарданного инерциального модуля на ВОГ// Гироскопия и навигация, №1(48), 2005. –с.22-29. 47. Емельянцев Г.И., Cai Tijing. О наблюдаемости восточного дрейфа инерциального измерительного модуля в условиях специального маневрирования объекта// Гироскопия и навигация. -2005. - №4(51).- С. 32-41. 48. Емельянцев Г.И., Несенюк Л.П., Блажнов Б.А., Степанов А.П. Об особенностях калибровки бескарданного инерциального модуля на волоконно-оптических гироскопах в составе интегрированной системы в условиях орбитального полета космического аппарата // Гироскопия и навигация.- 2008.- №2(61)- С.39-53. 49. Емельянцев Г.И., Несенюк Л.П., Блажнов Б.А., Коротков А.Н., Степанов А.П. Об особенностях построения интегрированной инерциально-спутниковой системы для объектов, двигающихся в начальный период по баллистической траектории// Гироскопия и навигация.-2009.-№1(64). -С. 9-21. 50. Емельянцев Г.И., Блажнов Б.А., Степанов А.П. Об использовании фазовых измерений для задачи ориентации в интегрированной инерциально-спутниковой системе//Гироскопия и навигация.-2010.-№1(68). -C. 26-35. 51. Емельянцев Г.И., Ландау Б.Е., Левин С.Л., Романенко С.Г., Гуревич С.С., Особенности построения интегрированной системы ориентации и навигации для орби-тального космического аппарата // Гироскопия и навигация.- 2011.- №1(72)- С.17-26. 52. Емельянцев Г.И., Блажнов Б.А., Степанов А.П. Особенности использования фазовых измерений в задаче ориентации интегрированной инерциально-спутниковой системы. Результаты ходовых испытаний // Гироскопия и навигация. - 2011. №3(74). - С. 3-11. 53. Емельянцев Г.И., Драницина Е.В., Блажнов Б.А. О калибровке погрешностей БИИМ на ВОГ в условиях стенда. Гироскопия и навигация, № 3, 2012. c. 55-63. 54. Емельянцев Г.И., Блажнов Б.А., Степанов А.П., Семенов И.В. О решении задачи ориентации в интегрированной системе с использованием микромеханических датчиков для объектов с быстрым вращением. 21-ая Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сб. докладов, 26…29 May, 2014. - С. 60-64. 55. Емельянцев Г.И., Блажнов Б.А., Степанов А.П. О решении задачи ориентации инер-цииально-спутниковой системой с использованием фазовых и магнитометрических определений для объектов с быстрым вращением //Гироскопия и навигация.-2014.-№ 2(85) -С. 28-42. 56. Емельянцев Г.И., Степанов А.П., Блажнов Б.А., Семенов И.В. О построении миниатюрного GPS-компаса для малоразмерных объектов. Материалы XXI конф. памяти Н.Н. Острякова, 7-9 окт., 2014, «ЦНИИ «Электроприбор», СПб,- С. 118-126. 57. Емельянцев Г.И., Степанов А.П., Блажнов Б.А., Семенов И.В.. О результатах обработки данных навигационных спутников ГЛОНАСС в GPS-компасе с антенной базой на уровне длины волны несущей. 22th Saint Peters-burg International Conference on Integrated Navigation Systems, …. May, 2015, S.-Peters-burg, Russia, s. - 58. Жалило А.А. Обнаружение и устранение фазовых циклических скачков одночастотных и двухчастотных GPS/GNSS наблюдений – новый универсальный метод и алгоритмы. – СПб., ГНЦ РФ ЦНИИ «Электроприбор», XIV Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сб. материалов. -2007. – С. 293-302. 59. Жбанов Ю.К., Алехова Е.Ю., Петелин В.Л., Слезкин Л.Н., Терешкин.А.И. Коррекция масштабного коэффициента датчика угловой скорости БИНС быстровращающегося объекта. 18th Saint Petersburg International Conference on Integrated Navigation Systems, 30 May, 2011, S.-Petersburg, Russia. – Сб. материалов. -С. 103-104. 60. Иванцевич Н.В., Дмитриев П.П., Шебшаевич В.С., и др. Сетевые спутниковые радионавигационные системы, под ред. В.С. Шебшаевича. – 2-е изд., перераб. и доп. - М.: Радио и связь, 1993.– 408 с. 61. Интегрированная система Seapath 200. Product Manuals - Seapath 200. Precise Heading, Attitude and Position. Seatex AS, Trondheim, Norway, 1998-05-04. 62. Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация. -М.: Наука, 1976. 63. Измайлов Е.А., Лепе С.Н., Молчанов А.В., Поликовский Е.Ф. Скалярный способ калибровки и балансировки бесплатформенных инерциальных навигационных систем. - Доклад на XV-й С-Петербургской международной конференции по интегрированным навигационным системам, 26-28 мая 2008 года, Россия, Санкт-Петербург.- ЦНИИ "Электроприбор", стр. 145-154. 64. Каракашев В.А. Обобщенные уравнения ошибок инерциальных навигационных систем//Изв.вузов СССР «Приборостроение». -1973. - № 3. 65. Ковалев А.С., Лычев Д.И., Матвеев С.И. и др. Исследование температурных погрешностей микромеханического гироскопа. – Сб. докладов IX конференции молодых ученых. – СПб.: ЦНИИ «Электроприбор», 2007. С. 301-306. 66. Колеватов А.П. и др. Волоконно-оптический гироскоп бесплатформенных инерциальных систем навигационного класса. Разработка, термокомпенсация, испытания// Гироскопия и навигация.- 2010.- № 3 (70). –С. 49-60. 67. Конешов В.Н., Непоклонов В.Б., Соловьев В.Н. Сравнение глобальных моделей аномалий гравитационного поля Земли с аэрогравиметрическими измерениями при трансконтинентальном перелете //Гироскопия и навигация.-2014.-№2(85). –С. 86-94. 68. Кошаев Д.А. Определение курса по фазовым измерениям в условиях ограниченной видимости навигационных спутников на неподвижном основании //Гироскопия и навигация.-2013.-№1(80). –С. 64-78. 69. Кошаев Д.А. Проблемы вторичной обработки данных ГНСС: недостаток и переизбыток информации. Сб.: Материалы пленарного заседания 7-й Российской мультиконференции по проблемам управления. ЦНИИ «Электроприбор». СПб.- 2014. С. -74-89. 70. Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973. 71. Краснов А.А., Соколов А.В., Элинсон Л.С. Новый аэроморской гравиметр серии «Чекан». Гироскопия и навигация. 2014. № 1 (84). с. 26-34 72. Краснов А.А., Соколов А.В., Ржевский Н.Н. Опыт выполнения гравиметрических измерений с борта дирижабля. Сейсмические приборы. 2014. -Т. 50, № 4. -С. 36-42 73. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. -М.: Машиностроение.-1982.-216 с. 74. Кузнецов А.Г., Портнов Б.И., Измайлов Е.А. Разработка и испытания двух классов авиационных бесплатформенных инерциальных навигационных систем на лазерных гироскопах// Гироскопия и навигация. -2014. - № 2(85) - С. 3-12. 75. Ландау Б.Е. Электростатический гироскоп со сплошным ротором//Гироскопия и навигация. -1993. - № 1. - С.6-12. 76. Ландау Б.Е., Емельянцев Г.И., Левин С.Л., Романенко С.Г., Гуревич С.С., Одинцов Б.В. Основные результаты разработки и испытаний системы определения ориентации на электростатических гироскопах для низкоорбитальных космических аппаратов// Гироскопия и навигация.- 2007.- №2(57)- С.3-12. 77. Ландау Б.Е., Гуревич С.С., Емельянцев Г.И., Левин С.Л., Романенко С.Г., Одинцов Б.В. Результаты калибровки электростатических гироскопов в бескарданной инерциальной системе ориентации. - XV Санкт-Петербургская международная конференция по интегрированным навигационным системам. С.-Пб, Россия. - Сб. материалов, 26-28 мая 2008. -С.122-129. 78. Ландау Б.Е., Гуревич С.С., Емельянцев Г.И., Левин С.Л., Романенко С.Г. Калибровка погрешностей бескарданной инерциальной системы на электростатических гироскопов в условиях орбитального полета// Гироскопия и навигация.- 2010.- №1(68)- С.36-46. 79. Ландау Б.Е., Белаш А.А., Гуревич С.С., Емельянцев Г.И., Левин С.Л., Романенко С.Г. Бескарданная инерциальная система на электростатических гироскопах для орбитальных космических аппаратов и особенности ее математического обеспечения// Изв. вузов «Приборостроение» СПб ГУ ИТМО, 2011, в.6, с.66…75. 80. Лесков М.М., Баранов Ю.К., Гаврюк М.И. Навигация. М. «Транспорт», 1980. 81. Лесючевский В.М., Литманович Ю.А. Новые подходы к разработке дискретных алгоритмов выработки параметров поступательного движения объекта в инерциальных навигационных системах//Гироскопия и навигация. – 1994. - № 2. - С. 39-58. 82. Литманович Ю.А., Лесючевский В.М., Гусинский В.З. Исследование алгоритмов преобразования информации акселерометров в БИНС, использующих кратные интегралы от измеряемого ускорения//Гироскопия и навигация. -1997. - № 4. - С.34-48. 83. Лопарев А.В., Челпанов И.Б., Степанов О.А. Использование частотного подхода при синтезе нестационарных алгоритмов обработки навигационной информации// Гироскопия и навигация. - 2011. N3 (74). - С. 115-132 84. Лопарев А.В., Степанов О.А., Челпанов И.Б. Частотно-временной подход к решению задач обработки навигационной информации. Автоматика и телемеханика. 2014. № 6. С. 132-153 85. Лурье А.И. Аналитическая механика.- М.: Изд-во физ.-мат.лит., 1961. 86. Мартыненко Ю.Г. Движение твердого тела в электрическом и магнитном полях. –М.: Наука, 1988, с.368. 87. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. СПб: ЦНИИ „Электроприбор“, 2009. 278с. 88. Медич Д. Статистически оптимальные линейные оценки и управление.- М.: Энергия, 1973. 89. Микрин Е.А., Михайлов М.В., Рожков С.Н., Семенов А.С. Результаты летного эксперимента на МКС по исследованию влияния переотражений на решение задач навигации, ориентации и сближения по измерениям аппаратуры спутниковой навигации// Гироскопия и навигация.- 2012.- №1(76)- С.42-56. 90. Миллер Р.Б. Новый алгоритм определения параметров ориентации бесплатформенных систем//Аэрокосмическая техника. -1984. - № 5, Т.2. 91. Мирский Г.Я. Микропроцессоры в измерительных приборах. – М.: Радио и связь, 1984. – 160 с. 92. Михайлов Н.В., Михайлов В.Ф. Метод разрешения неоднозначности фазовых измерений GPS при относительной навигации космических объектов// Гироскопия и навигация. - 2008. - Т. 4. - C. 9-20. 93. Михайлов Н.В., Кошаев Д.А. Позиционирование космического аппарата на геостационарной орбите с использованием модели его возмущенного движения и приемника спутниковой навигации// 21-ая Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сб. докладов, 26…29 May, 2014. - С. 356-365. 94. Михайлов Н.В. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. – СПб: Изд. «Политехника». -2014. - 362 с. 95. Мориц Г. Современная физическая геодезия. М.: Недра. 1983. 390 с. 96. Нейман Ю. М. Вариационный метод физической геодезии. М.: Недра. 1979. 200 с. 97. Несенюк Л.П., Старосельцев Л.П., Кокорин В.И. и др. Интегрированная инерциально-спутниковая система ориентации и навигации с разнесенными антеннами//Гироскопия и навигация.-2000.-№4. 98. Нэш Р.А., Джордан С.К. Статистическая геодезия //ТИИЭР, 1978. Т. 66. № 5. С. 5-26. 99. Осипов А.В., Федоров Д.Н. Анализ эффективности интегрированной системы на участке выведения космического аппарата// Гироскопия и навигация.- 2010.- №4(71)- С.95-96. 100. Основы теории поле   Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 ), а по координатам - вплоть до 1 метра (1
), а по координатам - вплоть до 1 метра (1 
 ;
; ;
;
 , масса 15 кг
, масса 15 кг