|
|
Внутрисистемные интерфейсы БИИМВыбор того или иного интерфейса, организующего обмен данными между внутренними устройствами БИИМ (инерциальными датчиками, аналого-цифровыми преобразователями (АЦП) и центральным процессором, процессором и периферийными устройствами и проч.) подчинён воздействия ряда критичных факторов: - требуемого объёма передаваемых данных и необходимой скорости их передачи (обеспечение необходимой пропускной способности канала приёма/передачи данных); - необходимости обеспечения требуемого уровня целостности [10] передаваемой информации; - необходимости обеспечения синхронизации работы устройств БИИМ; - количества потребителей и передатчиков информации; - энергетических возможностей системы питания БИИМ; и ряда других. Так в ряде областей (ракетостроении, авиации, космическом приборостроении) необходимо соблюдать требования по обеспечению целостности и помехозащищённости передаваемой информации, когда отказ того или иного измерительного канала БИИМ может привести к потере управления объекта управления (ОУ). В ряде областей: высокоточной морской навигации, навигации высокодинамичных ОУ (где угловые скорости движения исчисляются десятками и сотнями градусов в секунду, а перегрузки достигают десятков ед. Таким образом, выбор типа интерфейса определяется соответствующими требованиями к БИИМ и должен осуществляться ещё на этапе проработки технического задания на БИИМ и подчиняться единому системному подходу при проектировании устройств такого рода. Характерными примерами современных БИИМ являются модули разработки таких фирм, как НПО ИТ (г. Королёв), ОАО "Концерн "ЦНИИ "Электроприбор" (г. Санкт-Петербург), I-sence (г. Москва), Systron Donner (США), Honeywell (США), Analog Devices (США) и др. Характеристики ряда инерциальных датчиков и БИИМ указанных фирм-производителей приведены в таблице 1.2.1.
Таблица 1.2.1 – Характеристики инерциальных ЧЭ и БИИМ
* Под классом точности понимается нестабильность смещения нуля гироскопа в пуске Варианты внутренней структуры организации взаимодействия устройств БИИМ можно рассмотреть на примере БИИМ ф. Honeywell и Analog Devices. На рис. 1.2.3 приведён внешний вид рассматриваемых модулей.
Рис. 1.2.3 Внешний вид модулей 6DF и ADIS16488A
На рис.1.2.4-1.2.5 приведены примеры внутренней структуры рассматриваемых БИИМ.
Рис. 1.2.4 Структура внутренней организации взаимодействия устройств модуля 6DF
Рис. 1.2.5 Структура внутренней организации взаимодействия устройств модуля ADIS16488A Из приведённых материалов следует, что основными интерфейсами организации внутреннего взаимодействия являются последовательные интерфейсы (CAN, RS232/422, SPI, а также интерфейс типа Манчестер). Причём там, где требуется обеспечение помехоустойчивости, целостности передаваемой информации, взаимодействие со мноими абонентами используются высокоскоростные интерфейсы CAN и Манчестер, SPI, RS422. Следует отметить, что рассмотренные примеры являются типичными (с точки зрения использования интерфейсов) в области создания БИИМ. Приведём далее кратко характеристики некоторых из указанных интерфейсов. Согласно [30] RS-232C (V.24/V.28) – это рекомендованный стандарт (RS -Recommended Standard) EIA, определяющий последовательный коммуникационный интерфейс (т. е. способ взаимодействия) между DTE (Data Terminal Equipment, оконечное оборудование данных, ООД) и DCE (Data Circuit terminating Equipment, аппаратура передачи данных, АПД). Число 232 - исходный серийный номер данного стандарта. Наиболее часто используют вариант «С» этого стандарта, т. е. RS-232C. В случае, когда используют вариант «D», префикс RS меняется на EIA. Между вариантами «С» и «D» практически нет никакой разницы. Стандарт RS-232C описывает несимметричный интерфейс между ООД и АПД, работающий в режиме последовательного обмена двоичными данными со скоростями передачи до 20 Кбит/с. Интерфейс называется несимметричным, если для всех цепей обмена этого интерфейса используется один общий возвратный провод - сигнальная «земля». В симметричных интерфейсах собственную сигнальную «землю» имеет каждая цепь обмена. В отличие от RS-232C интерфейс RS-449A имеет две отдельные электрические спецификации: несимметричный электрический интерфейс RS-423А; симметричный электрический интерфейс RS-422A. Если физическую удаленность (более 15 м) и скорость передачи, определенные стандартом RS-232C, необходимо увеличить, то следует использовать альтернативные типы сигналов, определенные в стандарте RS-422A (V.11). В нем применяют сочетание кабеля из витой пары и дифференциальных передающей и принимающей схем. Дифференциальная передающая схема вырабатывает два равных, но противоположной полярности сигнала для каждого подлежащего передаче бита. Так как дифференциальная принимающая схема чувствительна только к разности между двумя сигналами на двух своих входах, то любой шум (синфазная помеха), воздействующий на оба провода, не окажет влияния на работу приемника. Поэтому говорят, что дифференциальные приемные устройства обладают высокой помехоустойчивостью. Механические характеристики определяются стандартом ISO 4902 (37- контактный разъем и 9-контактный разъем для вспомогательного канала связи). В таблице 1.2.2 приведены характеристики скорости передачи от длины линии связи. Таблица 1.2.2 – Зависимость скорости передачи от расстояния
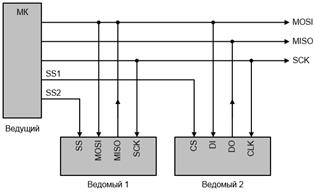
Более высокий уровень синхронизации (в сравнении с протоколами типа RS) передаваемых между устройствами данных обеспечивает интерфейс SPI (Serial Peripheral Interface). Структурная схема сопряжения МК и двух периферийных устройств с использованием данного интерфейса приведена на рис. 1.2.6.
Рис. 1.2.6 Структурная схема сопряжения устройств с помощью интерфейса SPI В данном случае МК является ведущим устройством, он инициирует обмен при передаче информации между МК и одним из периферийных устройств. Каждое из периферийных устройств является ведомым устройством. SPI-шина представлена тремя общими линиями связи (MISO, MOSI, SCK) и двумя линиями выбора ведомого устройства (SS1, SS2), которые индивидуальны для каждого из них [33]: MOSI – линия передачи данных от ведущего к ведомому (Master Output Slave Input); MISO – линия передачи данных от ведомого к ведущему (Master Input Slave Output); SCK – линия сигнала стробирования данных; SS1 и SS2 – линии сигналов выбора ведомого устройства. Как видно из рис. 1.2.6, образованная на основе интерфейса SPI минисеть относится к классу магистрально-радиальных. Линии передачи данных и линия синхронизации являются примером шинной организации, а линии выбора ведомого устройства – элементом системы радиального типа. Перед началом обмена ведущее устройство отмечает одно ведомое устройство (линия SSi), с которым будет производиться обмен. Затем ведущее устройство последовательно выставляет на линию MOSI восемь бит информации, сопровождая каждый бит сигналом синхронизации SCK. Следует отметить, что в случае необходимости обеспечения жёсткой временной синхронизации БИИМ с внешними устройствами целесообразным является организация аналоговой линии приёма/передачи синхронизирующей информации (синхроимпульса (СИ)), формируемой по бортовой шкале времени внешнего по отношению к БИИМ устройства. Высокие характеристики надежности и скорости передачи данных обеспечивают интерфейсы CAN и Манчестер. Разработанный в середине 80-х гг. фирмой Bosch для систем управления узлами автомобиля протокол CAN (Controller Area Network – сеть контроллеров) является последовательным протоколом высокоскоростной и высоконадежной передачи данных в широковещательном (broadcast) режиме и мультимастерной среде [33]. Достоинствами CAN-технологии являются удачное сочетание низкой стоимости подключения, простоты и надежности с проверкой временем и широкой доступностью элементной базы и инструментальных средств разработки. Положения, закрепленные в используемой на сегодня спецификации 2.0 А/В фирмы Bosch и международном стандарте ISO 11898, соответствуют двум начальным уровням (физическому и канальному) 7-уровневой модели взаимодействия открытых систем ISO/OSI. Ряд оригинальных технических решений, реализованных при разработке протокола, наилучшим образом позволили сориентировать его на решение задач контроля и управления. Шинная топология, являющаяся основой CAN, требует наличия механизма адресации узлов, однако в CAN нет адресов как таковых: сообщение принимается всеми узлами. Любое передаваемое сообщение имеет определяющий его содержание уникальный идентификатор (ID), на основании которого каждый узел фильтрует "свои" сообщения и "решает" – реагировать или нет на сообщение, транслируемое в данный момент. Существенными преимуществами отсутствия адресации являются теоретически неограниченное количество узлов и простота их добавления и отключения. Физическая среда передачи данных в CAN может быть самой разной – витая пара, плоский кабель, оптоволокно, а также радио и ИК каналы и др. Основным ограничением протяженности шины является лишь предельно допустимая суммарная задержка распространения сигнала для заданной скорости передачи (в кабеле, трансиверах, входных цепях контроллеров и т.д.). В соответствии с рекомендациями ISO11898 при использовании стандартных трансиверов и быстродействующих оптопар (для гальванической развязки) максимальная протяженность сети при скорости передачи 1 Мбит/с ограничена девятью метрами. В документах промышленной CAN-группы CiA (CAN in Automation) приведены следующие полученные практическим путем соотношения скорость-протяженность для проводной сети без гальванической развязки: 1 Мбит/с – 30 м; 500 Кбит/с – 100 м; 125 Кбит/с – 500 м; 20 Кбит/с – 2500 м; 10 Кбит/с – 5000 м. Стандарт Манчестер [175] - MIL-STD-1553B (отечественный аналог - ГОСТ Р 52070-2003), разработанный Министерством обороны США распространяется на магистральный последовательный интерфейс с централизованным управлением, применяемый в системе электронных модулей. Особенностью интерфейса является двойная избыточная линия передачи информации, полудуплексный протокол «команда-ответ» и до 31 удалённого абонента (оконечного устройства). Каждая линия управляется своим контроллером канала. Надежность в системе передачи информации может быть достигнута за счёт использования двух или трёх независимых физических каналов (резервирования каналов), к которым подключены все устройства на шине. В случае отказа канала в текущий момент, резервирование канала предусматривает резервирование контроллера шины, проводника и оконечных устройств. Типичная шина MIL-STD-1553B (рис. 1.2.7) может включать: · два канала (основной и резервной); · контроллер шины; · оконечные устройства; · монитор канала.
Рис. 1.2.7 Структурная схема сопряжения устройств с помощью интерфейса Манчестер
  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 ) имеют место высокие требования по обеспечению синхронизации устройств БИИМ.
) имеют место высокие требования по обеспечению синхронизации устройств БИИМ. (ММГ "Эптрон", ЦНИИ
"Электроприбор")
(ММГ "Эптрон", ЦНИИ
"Электроприбор")
 (АИСТ-350, I-sence)
(АИСТ-350, I-sence)
 (МБИНС, НПО ИТ)
(МБИНС, НПО ИТ)
 (SDI 510, Systron Donner)
(SDI 510, Systron Donner)
 (6DF Series, Honeywell)
(класс точности 3600°/ч)
(6DF Series, Honeywell)
(класс точности 3600°/ч)
 (класс точности 5 °/ч)
(класс точности 5 °/ч)