
|
|
Точечные конечные состояния, классификация, фазовые портреты, эволюция системЗапишем уравнение модели для системы с двумя переменными:
Действуя так же, как в предыдущем разделе, определим особые точки, решив стационарные уравнения: F1(q1, q2)=0; F2(q1, q2)=0. (8.2) Отсюда получим стационарные решения q1,2(s). Придадим системе возмущения по обоим переменным dq1 и dq2 :
Подставив dq1, dq2 в дифференциальные уравнения для F1,2, разложим функции F1,2 в ряд вблизи исследуемой особой точки q1,2(S ), тогда в линейном приближении получим:
причём Будем искать решение полученной системы линейных обыкновенных дифференциальных уравнений в известном виде:
где Аik - постоянные интегрирования, которые зависят от начальных значений dq1,2 (0). Для определения р1,2 запишем характеристическое уравнение системы дифференциальных уравнений (8.4), подставив (8.5) в (8.4):
Раскрывая определитель, получим:
Это уравнение является квадратными относительно р, то есть оно имеет два решения р1 и р2. Исследуем всевозможные сочетания корней р1, р2 - их всего шесть: · р1, р2 - действительные отрицательные числа, тогда возмущения со временем «рассасываются» (показатели экспонент отрицательны); особая точка является устойчивым узлом - траектории вблизи устойчивого узла и зависимость от времени приведены на рис.8.1. Рис.8.1. Траектория вблизи устойчивого узла (а) и поведение системы (б). · р1, р2 - действительные положительные числа, при этом возмущения растут неограниченно; особая точка - неустойчивый узел, показанный на рис.8.2.
Рис.8.2. Траектория вблизи неустойчивого узла (а) и поведение системы (б). · р1, р2 - действительные числа, имеющие разные знаки (одна из экспонент растёт, другая убывает); особая точка – седло, и она неустойчива (рис.8.3).
Рис.8.3. Траектория вблизи седла (а) и поведение системы (б). · р1, р2 - комплексные числа с положительной действительной частью; особая точка - неустойчивый фокус; траектория вблизи особой точки и поведение системы показаны на рис.8.4.
q2 t а б Рис.8.4. Траектория вблизи неустойчивого фокуса (а) и поведение системы (б). · р1, р2 - комплексные числа с отрицательной действительной частью; особая точка - устойчивый фокус - показана на рис.8.5.
а б Рис.8.5. Траектория вблизи устойчивого фокуса (а) и поведение системы (б). · р1,р2 - числа чисто мнимые, тогда решение выражается тригонометрическими функциями, показанными на рис.8.6; особая точка – центр, который обладает устойчивостью, так как dq1,2 со временем не растут, Поведение системы вблизи центра - типичный пример маргинальной (безразличной) устойчивости.
Рис. 8.6. Траектория вблизи центра(а) и поведение системы при маргинальной устойчивости (б). Шести видам фазовых траекторий вблизи особых точек соответствуют шесть типов поведения системы вблизи стационарного состояния. Вспомним, что система с одной переменной имела всего два возможных типа поведения. Пример. Проанализируем на устойчивость металлургическую систему, уже рассмотренную нами как пример неравновесных переходов - восстановление вюстита оксидом углерода СО в присутствии твёрдого углерода, только теперь выберем такие условия, при которых восстановительная реакция сильно смещена вправо: FeO+CO→ Fe+CO2 , а реакция газификации протекает обратимо:
Это возможно, например, в том случае, если концентрация (или активная поверхность) твёрдого углерода достаточно велика; кроме того, система открыта, т.е. газы СО и СО2 могут свободно выходить из реакционной зоны, причём тем быстрее, чем больше их концентрация:
Будем следить за изменением концентраций обоих газов, при этом концентрацию СО обозначим x, СО 2 - y. Тогда кинетические уравнения (модель системы) можно записать в виде:
где
Мы обнаружим, что стационарное состояние единственное
Далее воспользуемся характеристическим уравнением, подставив в него полученные значения
где
Полученное решение свидетельствует, что его корни р1 и р2 всегда действительны (выражение в квадратных скобках всегда положительно) и меньше нуля р1 < 0, р2 < 0 (так как второй член решения всегда меньше первого) - это значит, что стационарная точка Анализ устойчивости особых точек, проведённый для систем с двумя переменными, можно распространить на системы с произвольным количеством переменных (см. Приложение).
Предельные циклы Проиллюстрируем особенности двумерных моделей неравновесных систем по сравнению с одномерными на примере движения частицы (шарика) по дну круглого желоба с постоянной угловой скоростью ω. Для этого запишем уравнения движения в полярных координатах q1 = r cosφ; q2 = r sinφ, (8.13) где r – радиус-вектор частицы, φ – полярный угол. Они будут иметь следующую форму:
φ = ω. (8.14)
Первое уравнение системы (8.14) фактически задаётся формой желоба, а второе отражает факт постоянства угловой скорости. Если функция F(r) градиентная, т.е. можно ввести потенциал F(r) = – dV/dt, причём кривая V(r) при вращении вокруг оси (рис.8.7) образует поверхность, называемую потенциальной – «рельеф местности», в которой происходит движение частицы. Так как жёлоб имеет круговую форму, то и потенциальная кривая должна быть симметричной относительно оси вращения:
Рис.8.7. Потенциальная поверхность при движении частицы по кольцевому желобу. Понятно, что какими бы ни были начальные координаты частицы r(0) и φ(0), частица обязательно будет приближаться к стационарной круговой траектории, расположенной на дне жёлоба - это происходит оттого, что жёлоб расположен между двумя склонами (наружным и внутренним). Значит, частица при движении вдоль желоба всегда будет стремиться к минимуму потенциальной энергии, то есть на фазовой плоскости q1 – q2 (рис. 8.8) траектория движения частицы при любых начальных значениях координат будет иметь спиралеобразную форму:
Рис.8.8. Фазовый портрет движения частицы вблизи кольцевого жёлоба: если начальное значение радиус-вектора частицы меньше радиуса кругового желоба r0, то траектория движения частицы будет представлять собой раскручивающуюся спираль, если же r(0) > r0 – то скручивающуюся, при этом в обоих случаях конечной будет круговая (замкнутая) траектория по дну желоба, к которой стекаются все остальные траектории на фазовой плоскости - она носит название устойчивого предельного цикла. Возможен другой вариант функции F(r) (рис.8.9), когда потенциальная кривая имеет более сложную форму, а потенциальная поверхность похожа на глубокую симметричную яму, по склону которой проходит неглубокий кольцевой желоб:
Рис.8.9. Устойчивый и неустойчивый предельные циклы. Если начальный радиус-вектор частицы больше r0, то частица скатится на дно желоба r = r1, которое в этом случае соответствует устойчивому предельному циклу (как и в предыдущем примере). Но если частица в начале движения имеет координату 0 < r(0) < r0, то она скатится на дно ямы - к состоянию устойчивого равновесия. Траектория при точном равенстве r = r0 характеризуется тем, что все соседние траектории от неё удаляются или в сторону дна ямы, или в сторону кругового желоба r = r1. Такая замкнутая траектория, от которой удаляются все соседние траектории, называется неустойчивым предельным циклом. Наряду с особыми траекториями – предельными циклами, которые присущи моделям с двумя переменными, в них присутствуют и особые, критические точки, соответствующие стационарным состояниям: так, точка с координатой r = 0 в обоих рассмотренных примерах функций F(r) является особой, но в первом случае она неустойчива (вершина потенциального холма), во втором – устойчива (дно потенциальной ямы). Поведение системы, находящейся на предельном цикле – это колебательный процесс. Если речь идёт об устойчивом предельном цикле, то амплитуда колебаний не уменьшается со временем - система испытывает самоподдерживающиеся колебания, называемые автоколебаниями. Если в начальный момент времени система находилась на неустойчивом предельном цикле, то частота и амплитуда колебаний со временем меняются. Несложно убедиться, что тип колебательного состояния (фазы) зависит от того, каким способом система попадает на предельный цикл (явление гистерезиса). Возвращаясь к рис.8.7 и рис.8.9, можно заметить, что траектории частицы, приводящие на предельный цикл от состояния r = 0, в первом и втором случаях качественно отличаются. Для частицы, находящейся в условиях, соответствующих рис.8.7, колебания возникают самопроизвольно: частица, начиная движение в неустойчивой особой точке, сама со временем попадает в жёлоб - чтобы здесь возникло колебательное движение (поскольку в самой особой точке время длится бесконечно долго), достаточно бесконечно малого возмущения (флуктуации). Такое самопроизвольное возбуждение автоколебаний носит название мягкого возбуждения (бытовой пример мягкого возбуждения – механический будильник после того, как его завели). В случае на рис.8.9 для перевода частицы из равновесного положения (r = 0) на устойчивый предельный цикл (r = r1) надо преодолеть потенциальный барьер при r = r0, т.е. преодолеть пороговое значение потенциала V(r0) - такой способ перевода системы в автоколебательную фазу называется жестким возбуждением (реализуется в часах-ходиках после подъёма гири, когда прежде надо толкнуть маятник). Реализация того или иного типа возбуждения зависит от вида потенциала V(r) или, что то же самое, от вида функции F(r). Как могут происходить неравновесные (динамические) фазовые переходы в системах, фазовые портреты которых содержат предельные циклы? Будем плавно менять вид функции F(r) так, чтобы глубина жёлоба на склоне ямы стала постепенно уменьшаться, при этом в какой-то момент точки r0 и r1 сольются в одну точку перегиба (рис.8.10), то есть произойдёт аннигиляция устойчивого и неустойчивого предельных циклов, которую можно представить бифуркационной схемой:
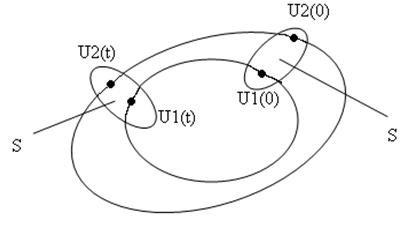
Рис.8.10. Слияние (аннигиляция) устойчивого и неустойчивого предельных циклов. Итак, можно констатировать, что в двумерных динамических моделях, кроме особых точек, характеризующихся неизменностью во времени переменной (концентрации, координаты, численности популяции) и отвечающих стационарным состояниям системы, появляются особые траектории и соответствующие им бифуркации (неравновесные фазовые переходы). ОБЩИЕ ВОПРОСЫ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ Понятие устойчивости, которое мы прежде многократно упоминали, является центральным при исследовании сложных нелинейных систем. Мы называли стационарное состояние устойчивым, если при неизменных внешних условиях система находится в нём неограниченно долго. Зададимся теперь вопросом, по отношению к чему проявляется устойчивость системы? Мы уже говорили, что в реальных условиях существуют случайные неконтролируемые возмущения – флуктуации, и если система находится в устойчивом состоянии, то флуктуации, например, начальных условий не отразятся на дальнейшем поведении системы - она всё равно останется в этом состоянии. И наоборот, флуктуации, как бы они не были малы, помешают системе задержаться в неустойчивом состоянии - на вершине горы. Здесь мы говорим об устойчивости лишь по отношению к флуктуациям. Значит, для проведения исследования на устойчивость системы, находящейся в заданном стационарном или нестационарном состоянии, необходимо математически определить понятие устойчивости. Существует несколько видов устойчивости систем. Устойчивость по траектории Рассмотрим некоторую траекторию uj (t) как движение системы в фазовом пространстве. Эта траектория устойчива, если другие траектории, которые в начальный момент времени t = t0 были рядом с траекторией uj (t), не удаляются со временем (рис. 9.1):
Рис.9.1. Поведение двух соседних траекторий движения системы в случае устойчивости по траектории. Поясним это обстоятельство. Каждая траектория – это единственный путь (поведение) системы при заданных начальных условиях. Разные начальные условия дают разные траектории в фазовом пространстве. Если мы говорим, что траектории были рядом в начальный момент времени, то это значит, что мы изучаем поведение системы при близких начальных условиях. Из того, что траектории со временем не расходятся (остаются поблизости друг от друга) следует, что значения характеризующих систему переменных qi, имеющие небольшое различие при близких начальных условиях, также незначительно отличаются друг от друга и во все последующие моменты времени - с математической точки зрения это означает, что в окрестности S заданнойтраектории uj (t) в фазовом пространстве все соседние траектории, исходящие из этой окрестности, всегда остаются в этой окрестности. Тогда говорят, что траектория uj (t) устойчива (см. рис.9.1). Если же нельзя найти такую окрестность, которую соседние траектории в любой последующий момент времени не покидали бы, то траектория uj (t) неустойчива. Можно сузить это определение. Пусть соседние траектории uj(t) и vj(t) обладают следующими свойствами:
то есть соседние траектории асимптотически стремятся друг к другу. Устойчивость, соответствующая данному определению, называется асимптотической устойчивостью по траектории. Если же
то мы имеем дело с асимптотически неустойчивой траекторией. Орбитальная устойчивость Рассмотрим теперь траекторию движения системы с точки зрения её геометрической формы. Пусть дана траектория u1 (t): если для заданного
Рис.9.2. Движение систем при орбитальной устойчивости (соседние траектории). Примеры: два самолета, вылетевшие примерно в одно и то же время, но с разными скоростями по одинаковому кольцевому маршруту, пролетают по орбитально устойчивой траектории для данной серии полетов несмотря на то, что расстояние между самолётами в процессе полёта всё время увеличивается. Или пусть имеется движение материальной точки, которое в полярных координатах выражается уравнениями:
Это движения по окружностям такие, что, чем больше радиус окружности r, тем больше угловая скорость Орбитальная устойчивость также может быть асимптотической в случае, если расстояние между движущейся по траектории точкой R, первоначально близкой к u1 (t), и самой траекторией u1 (t) стремится к нулю при t → ∞.
Структурная устойчивость Пусть даны уравнения динамической модели системы: qj = Fj, (9.4) где функции Fj часто зависят не только от переменных qj, но и от внешних параметров   Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 1,2 = F1,2 (q1, q2). (8.1)
1,2 = F1,2 (q1, q2). (8.1)

 (8.3)
(8.3)
 , (8.4)
, (8.4) │ q1,2(s).
│ q1,2(s). ;
; , (8.5)
, (8.5)
 = 0 (8.6)
= 0 (8.6) . (8.7)
. (8.7)


 q1
q1




 .
.

 , (8.8)
, (8.8) (k1 - константа скорости прямой реакции газификации, SFeO - эффективная реакционная поверхность вюстита);
(k1 - константа скорости прямой реакции газификации, SFeO - эффективная реакционная поверхность вюстита);  (k2 - константа скорости обратной реакции газификации, Sc - эффективная реакционная поверхность твердого углерода). Для анализа данной системы определим стационарные состояния, решив стационарные уравнения:
(k2 - константа скорости обратной реакции газификации, Sc - эффективная реакционная поверхность твердого углерода). Для анализа данной системы определим стационарные состояния, решив стационарные уравнения:
 . (8.9)
. (8.9) . Исследуем поведение системы вблизи стационарного состояния, для чего придадим концентрациям малые возмущения δх и δy, подставим их в кинетическое уравнения и отбросим все члены, кроме линейных – тогда получим систему линейных дифференциальных уравнений. Найдём её коэффициенты
. Исследуем поведение системы вблизи стационарного состояния, для чего придадим концентрациям малые возмущения δх и δy, подставим их в кинетическое уравнения и отбросим все члены, кроме линейных – тогда получим систему линейных дифференциальных уравнений. Найдём её коэффициенты  :
:
 ;
; ;
; (8.10)
(8.10)
 (8.11)
(8.11)
 . Решение характеристического уравнения таково:
. Решение характеристического уравнения таково: (8.12)
(8.12) есть устойчивый узел: концентрация СО и СО2 со временем стремятся к нулю, причём реакция затухает – то есть становится ясно, что реальная восстановительная система, соответствующая данной модели, самопроизвольно функционировать не может. Для стационарного протекания восстановительной реакции схему опыта надо изменить (например, создать постоянный приток монооксида углерода).
есть устойчивый узел: концентрация СО и СО2 со временем стремятся к нулю, причём реакция затухает – то есть становится ясно, что реальная восстановительная система, соответствующая данной модели, самопроизвольно функционировать не может. Для стационарного протекания восстановительной реакции схему опыта надо изменить (например, создать постоянный приток монооксида углерода). = F(r);
= F(r);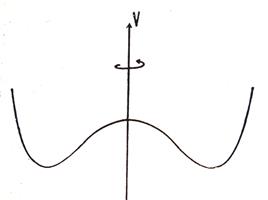


 → отсутствие предельного цикла
→ отсутствие предельного цикла
 при t → ∞, (9.1)
при t → ∞, (9.1) > 0 найдется такое η > 0, чтоточка R, движущаяся по траектории, близкой к u1 (t) (т.е. по «соседней» траектории в смысле близости начальных условий), в момент t0 находится от u1 (t) на расстоянии не более η и при t > t0 остается на расстоянии не большем
> 0 найдется такое η > 0, чтоточка R, движущаяся по траектории, близкой к u1 (t) (т.е. по «соседней» траектории в смысле близости начальных условий), в момент t0 находится от u1 (t) на расстоянии не более η и при t > t0 остается на расстоянии не большем 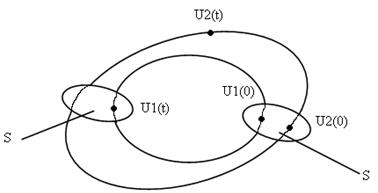
 (9.3)
(9.3) - это значит, две частицы, которые в начале движения были на соседних орбитах с близкими радиусами, со временем расходятся вследствие отличия их угловых скоростей – очевидно, устойчивости по траектории здесь нет, но форма орбиты не меняется при небольших изменениях начального значения r, а следовательно, орбитальная устойчивость здесь имеется.
- это значит, две частицы, которые в начале движения были на соседних орбитах с близкими радиусами, со временем расходятся вследствие отличия их угловых скоростей – очевидно, устойчивости по траектории здесь нет, но форма орбиты не меняется при небольших изменениях начального значения r, а следовательно, орбитальная устойчивость здесь имеется. , которые называются управляющими параметрами. При фиксированных значениях управляющих параметров поведение системы, описываемое траекториями в фазовом пространстве, однозначно зависит от начальных условий – такая картина, изображающая поле траекторий в интересующей нас области фазового пространства для всех возможных начальных условий, называется фазовым портретом системы. Если при небольших изменениях управляющих параметров структура фазового портрета остаётся без изменений, то говорят, что система обладает структурной устойчивостью («грубая» системв). Наоборот, система является структурно неустойчивой (особенной), если при небольших изменениях хотя бы одного из параметров в фазовом портрете происходят структурные (топологические) изменения. Что это значит? Основные, качественные изменения фазового портрета происходят при изменении характера особых точек или/и циклов, то есть при ветвлении решений - при бифуркациях, которые соответствуют неравновесным фазовым переходам системы. Таким образом, следует отметить, что структурная устойчивость нарушается при неравновесных фазовых переходах, когда состояние системы становится чувствительным к флуктуациям внешних (управляющих) параметров.
, которые называются управляющими параметрами. При фиксированных значениях управляющих параметров поведение системы, описываемое траекториями в фазовом пространстве, однозначно зависит от начальных условий – такая картина, изображающая поле траекторий в интересующей нас области фазового пространства для всех возможных начальных условий, называется фазовым портретом системы. Если при небольших изменениях управляющих параметров структура фазового портрета остаётся без изменений, то говорят, что система обладает структурной устойчивостью («грубая» системв). Наоборот, система является структурно неустойчивой (особенной), если при небольших изменениях хотя бы одного из параметров в фазовом портрете происходят структурные (топологические) изменения. Что это значит? Основные, качественные изменения фазового портрета происходят при изменении характера особых точек или/и циклов, то есть при ветвлении решений - при бифуркациях, которые соответствуют неравновесным фазовым переходам системы. Таким образом, следует отметить, что структурная устойчивость нарушается при неравновесных фазовых переходах, когда состояние системы становится чувствительным к флуктуациям внешних (управляющих) параметров.