|
|
Развитие электропривода в горной промышленностиСтр 1 из 27Следующая ⇒ ЭЛЕКТРОПРИВОД И ЭЛЕКТРИФИКАЦИЯ ОТКРЫТЫХ ГОРНЫХ РАБОТ ПОД ОБЩЕЙ РЕДАКЦИЕЙ Д-РА ТЕХН. НАУК, ПРОФ. Б. П. БЕЛЫХА Допущено Министерством высшего и среднего специального образования СССР в качестве учебника для студентов вузов, обучающихся по специальности «Технология и комплексная механизация открытой разработки месторождений полезных ископаемых»
МОСКВА «НЕДРА» 1983 УДК 621.31 +621.31-3.13](075.8):622.271 Электропривод иэлектрификация открытых горных работ. Учебник для вузов/Б. П. Белых, В И. Щуцкий, Б. И. Заславец, Н. И. Чеботаев. М., Недра, 1983, 269 с. Изложен комплекс вопросов, относящихся к электрификации горнодобывающих предприятий с открытой разработкой месторождений полезных ископаемых. Рассмотрены особенности электропривода горных машин и механизмов, вопросы управления электроприводами. Приведены сведения об особенностях электроснабжения карьеров. Описаны виды, устройства и особенности эксплуатации электроустановок карьеров. Даны методики расчета распределительных сетей и электрического освещения. Проанализированы основные энергетические показатели эксплуатации электрохозяйства карьеров. Для студентов горных вузов и факультетов, обучающихся по специальности (0209) «Технология и комплексная механизация открытой разработки месторождений полезных ископаемых». Табл. 1, ил. 162, список лит.—23 назв. Рецензенты: кафедра электропривода Днепропетровского горного института, канд. техн. наук В. О.Жидков (Вост. НИИ).
ИЗДАТЕЛЬСТВО «Недра»,1983 ПРЕДИСЛОВИЕ Основным назначением курса «Электропривод и электрификация открытых горных работ» является изучение особенностей применения электрической энергии на горных предприятиях с открытой разработкой месторождений полезных ископаемых. Рассмотрение вопросов электрификации производится в неразрывной связи с рабочими машинами, технологией производства и организацией труда. Основными направлениями экономического и социального развития СССР на 1981 —1985 годы и на период до 1990 года, утвержденными XXVI съездом КПСС, предусмотрено производство электроэнергии в 1985 г. до 1550—1600 млрд. кВт-ч, в том числе на атомных электростанциях до 220—225 млрд. кВт-ч и на гидроэлектростанциях до 230—235 млрд. кВт-ч. В одиннадцатой пятилетке будет осуществлено строительство крупных гидроэлектростанций на реках Сибири, Дальнего Востока и Средней Азии с учетом комплексного использования гидроресурсов. Ускоренными темпами будет происходить строительство тепловых электростанций, использующих угли Экибастузского и Канско-Ачинского бассейнов, а также природный и попутный газ месторождений в Западной Сибири. Будут продолжены работы по дальнейшему развитию единой энергетической системы страны, повышению надежности и качества электроснабжения народного хозяйства. Дальнейшее развитие горного производства характеризуется все большим распространением открытого способа разработки полезных ископаемых как более экономичного. В настоящее время в СССР открытым способом добывается около 32 % угля, более 50 % руды и 100 % строительных материалов. Основными горными машинами на открытых горных работах являются одноковшовые и многоковшовые экскаваторы, горные комплексы, буровые станки, различные виды транспорта, многие из которых снабжены сложным электрооборудованием. Установленная мощность электрических машин на современном мощном экскаваторе достигает 20 000 кВт и более, что сравнимо со средним и даже крупным промышленным предприятием. Горные машины и комплексы, особенно большой единичной мощности, требуют применения совершенных систем автоматизированного электропривода и электроснабжения горных предприятий, способствующих повышению производительности труда и качества выпускаемой продукции. Применение регулируемого электропривода в большинстве случаев повышает производительность горных машин и механизмов на 10—15 % по сравнению с нерегулируемым электроприводом той же мощности. При этом основные тенденции развития электропривода заключаются в расширении области их применения, создании быстродействующих, надежных и экономичных систем регулируемого автоматизированного электропривода. Важное значение при электрификации горных машин и механизмов имеет повышение напряжения. Приводные двигатели мощных экскаваторов выполняются на напряжение 10 кВ, напряжение в контактных сетях электровозного транспорта на карьерах предполагается повысить при постоянном токе до 3—6 кВ, при переменном токе — до 20 кВ. На мощных карьерах проектируется глубокий ввод электроэнергии напряжением 35 и ПО кВ. Особое значение имеет создание различных защитных средств и повышение электробезопасности при обслуживании электрических сетей и электрооборудования. В книге разделы первый и третий, за исключением главы 9 и 30.2, написаны Белыхом Б. П., глава 9 и 30.2 — Щуцким В. И., раздел второй, за исключением главы 21,— Заслав цем Б. И., глава 21 —Чеботаевым Н. И. РАЗДЕЛ ПЕРВЫЙ ОСНОВЫ ЭЛЕКТРОПРИВОДА Глава 1 ОБЩИЕ СВЕДЕНИЯ 1.1. Определение электропривода Электрический привод представляет собой электромеханическое устройство, преобразующее электрическую энергию в механическую и предназначенное для приведения в движение рабочих машин, установок и механизмов. Современный электропривод (рис. 1.1) состоит из преобразовательного устройства П, электродвигателя Д, передаточного устройства ПУ и аппаратуры управления АУ. Преобразовательное устройство служит для преобразования трехфазного переменного тока сети в другой род тока или изменения его параметров (частоты, напряжения и т. д.). Электродвигатель служит для преобразования электрической энергии в механическую и передаче ее рабочему органу РО. Передаточное устройство служит для согласования скоростей двигателя и рабочего органа машины или преобразования вида движения (например, вращательного в поступательное). Аппаратура управления предназначена для управления процессом преобразования энергии с целью согласования его с технологическими условиями процессов, выполняемых рабочей машиной. По способу передачи механической энергии от вала двигателя к рабочим органам машины электропривод делят на три группы: групповой, одиночный и многодвигательный. Групповым называют привод, в котором несколько рабочих машин приводятся в движение через передачи (трансмиссии) одним двигателем. Этот привод имеет ряд недостатков: значительные потери энергии в передачах, малую надежность, сложность управления машинами и т. п. Одиночным приводом является привод, в котором рабочие органы машины приводятся одним электродвигателем. В этом случае иногда двигатель конструктивно является рабочим органом машины, например барабан ленточного конвейера со встроенным двигателем. Под многодвигательным приводом понимается привод, в котором каждый исполнительный механизм рабочей машины приводится в движение от отдельного двигателя. Многодвига В многодвигательном приводе управление машиной или механизмом (пуск, регулирование скорости, реверсирование, торможение и т. п.) осуществляется путем управления электродвигателями. Многодвигательный автоматизированный электропривод является современным, прогрессивным типом привода горнотранспортных машин и механизмов.
Основные понятия и определения Механической характеристикой электрического двигателя называют зависимость его угловой скорости от вращающего момента, т. е. o) = f(M). Механические характеристики электродвигателей можно разделить натри основных категории: 1) абсолютно жесткая механическая характеристика, при которой угловая скорость при изменении момента не изменяется (такую характеристику имеют синхронные двигатели); 2) жесткая механическая характеристика, при которой угловая скорость с изменением момента хотя и падает, но незначительно (такую характеристику имеют двигатели постоянного тока параллельного возбуждения и асинхронные двигатели в пределах рабочей части характеристики); 3) мягкая механическая характеристика со значительным Механические характеристики могут быть естественными и искусственными. Естественная механическая характеристика представляет собой зависимость ω = f(M) при нормальных условиях работы двигателя, т.е. при номинальном напряжении, потоке, частоте и при отсутствии дополнительных сопротивлений в силовой цепи (в цепи якоря, ротора и статора). При отсутствии одного из этих условий механическая характеристика будет искусственной. Механические характеристики имеют важное значение для оценки электромеханических свойств двигателя и являются одним из основных критериев при выборе того или иного двигателя для исполнительного механизма.
Общие понятия и определения Под переходными процессами электропривода понимаются процессы перехода от одного состояния электропривода к другому, т. е. режимы перехода от покоя к вращению и обратно, от одной скорости к другой, от одного направления вращения к другому, от одной нагрузки исполнительного механизма к другой. Таким образом, переходные процессы в электроприводе будут при пуске и торможении, регулировании скорости, реверсировании, приеме и сбросе нагрузки. Исследование переходных процессов позволяет выяснить зависимости вращающего момента двигателя, его скорости, тока и пройденного пути от времени за период перехода от одного состояния электропривода к другому. Количество исполнительных механизмов, для которых характер протекания переходных режимов электропривода малосуществен, ограничено. К ним можно отнести механизмы длительного режима работы с постоянной нагрузкой и с редкими пусками (вентиляторы, центробежные насосы). Для большинства рабочих машин протекание переходных процессов электропривода имеет существенное значение. Например, при цикличном режиме работы с большим количеством пусков производительность машины во многом зависит от длительности пуска и торможения (одноковшовый экскаватор). С уменьшением длительности пуска и торможения уменьшается длительность рабочего цикла — производительность увеличивается. Но при сокращении длительности этих режимов возрастают динамические нагрузки в элементах рабочей машины, что может привести к их разрушению. Поэтому только нагрузочные диаграммы, построенные с учетом переходных процессов в электроприводе, дают возможность правильно проектировать электропривод. Основной причиной переходных процессов в электроприводе являются механическая и электромагнитная инерционность. В зависимости от вида инерции, влияющей на переходные процессы, их разделяют на механические, электромагнитные и электромеханические.. Механические переходные процессы — учитывается только механическая инерция движущихся частей агрегата; электромагнитные переходные процессы — учитывается электромагнитная инерция индуктивностей обмоток электрических машин; электромеханические переходные процессы — учитываются механическая и электромагнитная инерции.
Общие сведения Пуск электродвигателя заключается в подсоединении его к источнику энергии и разгоне до требуемой скорости. Режим пуска определяется величиной и характером статического и пускового моментов. В зависимости от соотношений статического и номинального моментов режимы пуска могут быть: легкими, нормальными и тяжелыми. Если начальный статический момент не превышает 30—40 % номинального, пуск считается легким (пуск центробежных насосов и вентиляторов при закрытых задвижках, компрессоров с выхлопом в атмосферу, машинных преобразователей). Если начальный статический момент больше 40%, но меньше 100 % номинального, то режим пуска считается нормальным. Тяжелым режимом пуска считается пуск, когда начальный статический момент равен или более 100 % номинального. Этот режим пуска характерен для многих горных машин имеханизмов. В процессе остановки электропривода в системе действуют инерционные силы, стремящиеся удлинить время останова. Поэтому в большинстве случаев для уменьшения времени остановки применяется механическое и электрическое торможение. В этой главе рассмотрены основные способы пуска и электрического торможения электродвигателей. Тормозные режимы двигателей
Двигатели постоянного тока и асинхронные двигатели трехфазного тока позволяют применять три вида электрического торможения: генераторное торможение с рекуперацией энергии в сеть, динамическое торможение и торможение противовключением.
Двигатели постоянного тока параллельного возбуждения. На рис. 5.3 представлены схемы включения двигателя, а на рис. 5.4 — механические характеристики в тормозных режимах. Генераторное торможение с рекуперацией энергии в сеть (рис. 5.3, а) может быть только при скорости вращения якоря, большей скорости идеального холостого хода, т. е. ω>ω0. В этом случае Е> U и величина тормозного тока определяется уравнением
из которого видно, что направление тока меняется на обратное, т. е. ток поступает от двигателя в сеть. Этот режим работы применяется для торможения при спуске груза (подъемные машины, краны и т. п.), когда груз, опускаясь, может вращать якорь со скоростью ω>ω0. Точка 2 механической характеристики (см. рис. 5.4) соответствует этому режиму работы. Очевидно, этот вид торможения можно применять только для поддержания скорости на определенном уровне. Динамическое торможение (рис. 5.3, б) можно применять при любой скорости вращения якоря двигателя, отличной от нуля. Якорь двигателя при динамическом торможении отключается от сети и замыкается на тормозное сопротивление RAnn- Обмотка возбуждения обычно включается в сеть постоянного тока для создания неизменного магнитного потока двигателя. Величина тока якоря при динамическом торможении определяется выражением
Участок 3 — 0 механической характеристики (рис. 5.4) соответствует динамическому торможению. Так как Е пропорциональна скорости вращения якоря, то при малых скоростях динамическое торможение малоэффективно. Торможение противовключением (рис. 5.3, в) возможно при всех значениях скорости, вплоть до полной остановки двигателя. При противовключении двигатель вращается в обратную сторону. При этом э. д. с. Е действует согласно с приложенным напряжением (если изменить направление тока в обмотке возбуждения). Ток якорной цепи двигателя определится по выражжению
Подобный режим работы может быть осуществлен только при введении в цепь якоря достаточно большого сопротивления с целью ограничения тока якоря. Этому режиму работы соответствует участок 4 — -5 характеристики на рис. 5.4. Двигатели постоянного тока последовательного возбуждения могут иметь два режима торможения: динамическое торможение и торможение противовключением. Генераторное торможение с рекуперацией энергии в сеть при обычной схеме включения двигателя невозможно, так как двигатель не имеет скорости идеального холостого хода. Этот режим торможения возможен, если обмотку возбуждения подключить к независимому источнику тока. Схемы включения двигателя приведены на рис. 5.5, а механические характеристики — на рис. 5.6. Динамическое торможение можно применять при любой скорости, однако при малых скоростях эффективность торможения резко снижается. При этом режиме работы двигатель может быть включен по схемам, приведенным на рис. 5.5, а и б. В первой схеме двигатель отключается от сети и замыкается на тормозное сопротивление. Концы обмотки возбуждения следует поменять местами с целью предотвращения размагничивания двигателя. Вторая схема широкого применения не получила, так как в тормозном сопротивлении, включенном последовательно с обмоткой возбуждения, получаются большие потери электроэнергии. В остальном этот режим протекает так же, как и в двигателе параллельного возбуждения. Участок 2 — 0 механической характеристики соответствует динамическому торможению.
Торможение противовключением (рис. 5.5, в) осуществляется и протекает точно так же, как и в двигателе параллельного возбуждения. Участок 3 — 4 механической характеристики (рис. 5.6) соответствует торможению противовключением Асинхронные двигатели трехфазного тока. В асинхронных двигателях возможны три тормозных режима: торможение с рекуперацией энергии в сеть; торможение противовключением и динамическое торможение. На рис. 5.7 приведены схемы включения двигателя, а на рис. 5.8 механические характеристики при тормозных режимах. При торможении с рекуперацией энергии в сеть (рис. 5.7, а) направление вращения вращающегося магнитного потока статора совпадает с направлением вращения ротора. Скорость вращения ротора больше скорости вращения магнитного потока, т. е. (о>со0- Механическая энергия, подводимая к валу ротора извне (например, создаваемая опускаемым грузом), преобразуется в электрическую и отдается в сеть. Применяется этот режим торможения для поддержания постоянной скорости при опускании груза в подъемных установках. На механических характеристиках (см. рис. 5.8) этому режиму работы соответствует точка 2. При торможении противовключением ротор двигателя вращается в сторону, противоположную вращению магнитного потока статора. Этот режим работы может быть получен путем реверсирования двигателя на ходу (рис. 5.7, б). Ротор под действием запасенной кинетической энергии продолжает вращаться в прежнем направлении, а поле статора изменяет свое направление вращения. Режиму торможения противовключением соответствуют участки механических характеристик (см. рис. 5.8) 3 — 4 для двигателя с короткозамкнутым ротором и 3' — 4'( на реостатной характеристике двигателя с фазовым ротором) соответствуют динамическому торможению.
Динамическое торможение асинхронного двигателя осуществляется подключением обмотки статора к источнику постоянного тока. Обмотка ротора двигателя с фазным ротором замыкается на сопротивление (рис. 5.7, в). Машина работает как синхронный генератор с неподвижными полюсами. Части механических характеристик (рис. 5.8) 5— 0 (для двигателя с короткозамкнутым ротором) и 5'— 0 (на реостатной характеристике двигателя с фазным ротором) соответствуют динамическому торможению. Общие сведения Для машин и механизмов с частыми пусками и торможением или широким диапазоном регулирования скорости, особенно при больших мощностях, целесообразно применять управление двигателем постоянного тока посредством изменения подводимого к якорю напряжения, а асинхронными двигателями путем изменения частоты тока. Для осуществления таких способов управления применяются приводы по системам: генератор — двигатель (Г—Д), управляемый тиристорный преобразователь — двигатель (ТП—Д) и управляемый преобразователь частоты — двигатель (УПЧ-Д). В горной промышленности широко применяется многодвигательный привод (экскаваторы, электровозы, конвейеры, транспортно-отвальные мосты и др.). Основанием для применения многодвигательного привода могут быть конструктивные или эксплуатационные соображения. Когда габариты рабочей машины не позволяют установить один крупный двигатель, устанавливают несколько двигателей с необходимой суммарной мощностью. Многодвигательный привод применяют и для уменьшения момента инерции установки, так как суммарный момент инерции роторов (якорей) нескольких двигателей меньше момента инерции одного двигателя мощностью, равной суммарной мощности нескольких двигателей. Для регулирования скорости асинхронных двигателей применяются каскадные схемы.
Общие сведения Правильный выбор мощности электродвигателя имеет большое значение и во многом определяет первоначальные затраты и эксплуатационные расходы промышленных установок. При применении двигателей недостаточной мощности не обеспечивается нормальная работа механизма, снижается производительность, возможен быстрый выход из строя двигателя и т. п. Применение двигателей завышенной мощности ведет к увеличению расхода электроэнергии, снижению коэффициента мощности (для асинхронных двигателей), удорожанию установки и т. д. Правильно выбранный по мощности двигатель должен быть загружен мощностью, близкой к номинальной, и не должен перегреваться свыше допустимой температуры. Кроме того, он должен обеспечивать нормальную работу при возможных кратковременных перегрузках и удовлетворять условиям пуска. В подавляющем большинстве случаев выбор мощности двигателя производится по нагреву с последующей проверкой по перегрузочной способности и по условию пуска. Допустимая температура нагрева двигателя определяется теплостойкостью применяемых изоляционных материалов. Необходимо отметить, что с увеличением температуры нагрева двигателя свыше допустимой резко уменьшается срок службы изоляции, а следовательно, и срок службы двигателя. Работа двигателя с нагревом ниже допустимой температуры также нежелательна, так как при этом не будет полностью использоваться его мощность. Изолирующие материалы, применяемые для электрических машин и аппаратов, разделяются по теплостойкости на следующие классы:
Устанавливается также допустимое превышение температуры как разность между предельно допустимой и стандартной температурой окружающей среды τдоп ≤ θдоп -θср. Стандартная температура θср = 40 °С. Командоаппараты Командоаппараты — одно- или многоступенчатые переключающие аппараты, предназначенные для коммутации разветвленных электрических цепей. К ним относятся контроллеры, кнопки и ключи управления, путевые и конечные выключатели.
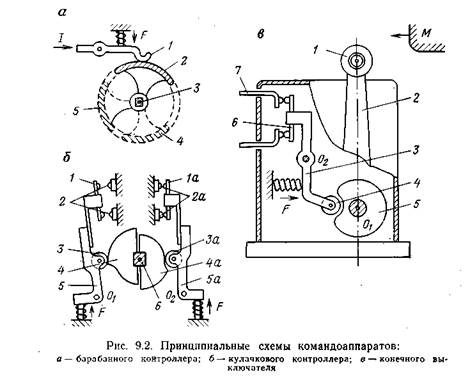
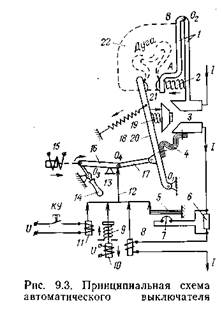
Контроллеры применяются в схемах управления двигателями постоянного и переменного тока и могут коммутировать как силовые цепи двигателей, так и цепи катушек управления силовых аппаратов, например контакторов. В последнем случае они называются командоконтроллерами. Барабанные контроллеры могут коммутировать силовые цепи двигателей мощностью до 45 кВт при постоянном токе и до 75 кВт при переменном токе. Устройство такого контроллера поясняет рис. 9.2, а. С валом 3, приводимым в действие оператором (машинистом), жестко связан подвижный контакт 2, представляющий собой участок цилиндрической поверхности сектора. В определенных положениях рукоятки привода, сидящей на валу 3, подвижные контакты 2 совместно с неподвижными контактами 1 создают замкнутую цепь тока. В других положениях вала 3 эта цепь разомкнута. На вал 3 насаживается ряд секторов с относящимися к ним подвижными контактами (например, 4 и 5). Эти контакты и соответствующие им неподвижные контакты расположены в других плоскостях по сравнению с контактами 1 и 2. Кулачковые контроллеры способны осуществлять до 600 коммутационных операций в час. Их отключающая способность и износоустойчивость выше, чем у барабанных контроллеров. Как видно из рис. 9.2,6, на валу контроллера 6 посажены кулачковые шайбы 4 и 4а с фигурным профилем. При повороте вала ролики 3 и За, оси вращения которых укреплены на деталях 5 и 5а, сбегают с выступов на кулачковых шайбах (или набегают на них). При этом детали 5 и 5а, поворачиваясь вокруг своих осей вращения 01 и 02, замыкают (или размыкают) связанные с ними контактные системы 1 — 2 и 1а — 2а. Движение контактов в сторону замыкания происходит под действием пружин F. В конструкции регулируемого командоконтроллера вместо кулачковых шайб применяются специальные шайбы с отверстиями на наружной цилиндрической поверхности. В этих отверстиях укрепляются специальные кулачки — выступы. В зависимости от места их установки может быть осуществлена определенная последовательность коммутации различных контактных цепей контроллера. В схемах управления электроприводами применяются барабанные контроллеры с ручным и ножным приводом типов К-1000, ЭК-8000, кулачковые регулируемые контроллеры серий КА400 и КА4000, сельсинные контроллеры с ручным и ножным управлением типов СКАР и СКАП и др. Кнопки управления — аппараты, применяемые в основном для управления цепями катушек электромагнитных аппаратов постоянного и переменного тока. Они могут иметь несколько контактных систем с замыкающимися (разомкнутыми при отсутствии внешнего воздействия на кнопку) и размыкающимися (замкнутыми при отсутствии внешнего воздействия на кнопку) контактами. Наиболее распространены кнопки серий КЕ, КУ121 и ПКЕ. Ключи управления по устройству сходны "с пакетными выключателями. На валу ключа размещен ряд элементов с подвижными контактными системами. Различная конфигурация контактов позволяет использовать разнообразные варианты последовательности переключений контактов. Ключи управления предназначены для ручного переключения цепей напряжением до 400 В постоянного тока и до 500 В переменного тока. В схемах управления применяются преимущественно ключи управления серий УП5300 и ПКУ-3. Ключи управления УП5300 различаются числом секций, диаграммой замыкания контактов, числом фиксированных положений и углом поворота рукоятки. Ключи управления ПКУ-3 имеют исполнения по способу установки и крепления, количеству пакетов, числу фиксированных положений и углу поворота рукоятки. Путевые и конечные выключатели осуществляют коммутацию цепей управления и автоматики на заданном участке пути, проходимом управляемым механизмом. Различают нажимные, рычажные и шпиндельные выключатели. На рис. 9.2, в приведена схема устройства рычажного конечного выключателя. При достижении упором механизма М ролика 1, укрепленного на рычаге 2, происходит поворот этого рычага и связанного с ним фасонного кулачка 5. Выступ кулачка набегает на ролик 4 и поворачивает деталь 3 вокруг оси 02 по часовой стрелке. Связанный с деталью 3 контактный мостик 6 отходит от неподвижных контактов 7 вправо и нормально замкнутые контакты аппарата размыкаются. Когда упор механизма М будет переведен в исходное положение, элементы конечного выключателя под действием пружины придут в первоначальное положение. Кроме путевых и конечных выключателей, основанных на механическом принципе действия, существуют бесконтактные путевые выключатели, основанные на принципе использования нелинейных элементов, в том числе дросселей со стальными сердечниками и переменным воздушным зазором, а также на принципе использования магнитных усилителей. Автоматические выключатели Автоматический выключатель (автомат) — аппарат, предназначенный для нечастых замыканий и размыканий электрической цепи, а также для автоматического размыкания цепей при появлении в них недопустимых отклонений от нормальных условий. Принципиальная схема автомата приведена на рис. 9.3. Автомат коммутирует электрическую цепь с током I. В указанном положении автомат отключен и силовая электрическая цепь разомкнута. Для включения автомата надо повернуть по часовой стрелке рукоятку ручного включения 14 или подать напряжение на электромагнитный привод 15. В обоих случаях создается усилие, которое, перемещая рычаги 16 и 17 вправо, поворачивают основную несущую деталь 20 автомата вокруг неподвижной оси 01 по часовой стрелке. Первыми замыкаются и включают цепь тока разрывные (дугогаснтельные) контакты 21. Гибкая связь 4 создает цепь тока через подвижный дугогасительный контакт 21, жестко связанный с несущей деталью 20. При дальнейшем движении детали 20 вправо через некоторый интервал времени замыкаются главные контакты 3, по которым проходит основная часть тока. После завершения операции включения вся система остается в крайнем правом положении с помощью специальной удерживающей защелки (насхеме не показана). Опора 13 не позволяет рычагам 16, 17 переместиться вниз. Если рычаги 16, 17 перевести вверх за мертвую точку, то отключающая пружина 18, взведенная при включении автомата, перемещает подвижную систему автомата влево (поворот вокруг оси 0\ против часовой стрелки) и отключает автомат. Это перемещение осуществляется через механическую связь 12 от любого из четырех расцепителей.
В главную цепь автомата включено добавочное сопротивление 6, падение напряжения на котором подается на нагреватель 7 биметаллического разделителя 5, осуществляющего защиту от токов перегрузки. При увеличении тока биметаллический элемент 5 изгибается вверх и создает усилие, которое передается через механическую связь 12 и переводит рычаги 16 — 17 вверх за мертвую точку, в результате чего автомат отключается. Защита от токов короткого замыкания производится максимальным расцепителем 8. Когда по катушке этого расцепителя протекает ток короткого замыкания, на якоре создается сила, переводящая рычаги 16, 17 вверх в мертвую точку, в результате чего автомат отключается. На катушку 10 минимального расцепителя подается напряжение защищаемой сети. При номинальной величине рабочего напряжения создается электромагнитная сила, достаточная для удержания сердечника катушки расцепителя в притянутом, нижнем положении. При уменьшении напряжения сети эта сила становится меньше силы пружины 9. Подвижная система расцепителя переходит в верхнее положение, осуществляя перевод рычагов 16, 17 за мертвую точку и отключение автомата. Независимый расцепитель 11 позволяет дистанционно отключить автомат с помощью кнопки управления КУ. При отключении автомата сначала размыкаются главные контакты 3, а ток протекает через параллельную цепь разрывных контактов 21. На главных контактах дуга не возникает, в силу чего они не обгорают. Разрывные контакты разойдутся на достаточное расстояние. На контактах 21 возникает дуга, которая выдувается вверх и гасится в дугогасительной камере 22.
Главные и разрывные контакты имеют пружины 19 и 2, обеспечивающие необходимое контактное нажатие во включенном состоянии. Во избежание самопроизвольного размыкания контактов при протекании по ним тока короткого замыкания применяется компенсатор электродинамических усилий. На рис. 9.3 изображен компенсатор, относящийся к разрывным контактам и искусственно образующий «петлю тока». По двум параллельным шинкам 1, связанным друг с другом общей осью вращения 02, на участках АВ протекают токи разного направления. Возникает электродинамическая сила, которая воздействует на левую подвижную деталь компенсатора в ту же сторону, что и контактная пружина 2. Результирующая сила способна противостоять электродинамической силе отталкивания контактов и они самопроизвольно не расходятся. Наиболее распространены универсальные и установочные автоматы постоянного и переменного тока серий А, АВ, АГ, АК, AM, AC, ACT, A3100, А3700, «Электрон» и др. Универсальные автоматы серии АВ выполняются на номинальные токи от 0,1 до 2 кА. Установочные автоматы серии A3100 выполняются на номинальные токи от 50 до 600 А при напряжении до 220 В постоянного и до 500 В переменного тока. Автоматы серии «Электрон» выполняются на номинальные токи от 0,63 до 4 кА, предназначены для работы в сетях постоянного тока до 440 В и переменного тока до 660 В, имеют ручной, электромагнитный или дистанционный привод. Универсальные автоматы не имеют специального защитного корпуса и обычно устанавливаются в распределительных устройствах. Установочные автоматы имеют пластмассовый защитный корпус и могут устанавливаться в различных помещениях, камерах и т. д. Для защиты силовых цепей электродвигателей, как правило, используют автоматы с комбинированными разделителями. Для защиты электродвигателей постоянного тока, а также асинхронных двигателей с фазным ротором при пусковых токах, не превышающих двух- трехкратного значения номинального, автоматы с кратностью отсечки 7—14 по отношению к номинальному току расцепителя не рекомендуется применять. При защите двигателей с короткозамкнутым ротором номинальный ток расцепителя автомата должен быть таким, чтобы каталожное значение тока отсечки автомата было не менее чем в 1,5 раза больше пускового тока двигателя. В силовой цепи двигателя, имеющего дополнительную защиту от перегрузки в виде теплового реле, для регулирования уставки последнего в обе стороны и исключения ложного срабатывания автомата от перегрузки номинальный ток комбинированного расцепителя должен не менее чем на одну ступень превышать номинальный ток теплового элемента реле. Реле управления и защиты Реле — это аппараты, служащие для автоматического замыкания и размыкания вспомогательных электрических цепей при измерении тех или иных параметров — электрических (напряжение, ток, мощность и др.) или неэлектрических (скорость, давление, температура и др.). Характерной особенностью реле является то, что под влиянием обычно плавного изменения контролируемых величин (тока, напряжения, температуры и т. д.) они действуют скачкообразно. Такой режим работы получил название релейного режима. Контакты реле рассчитаны на относительно малые токи (обычно не более 5—10 А) и воздействуют на цепи обмоток электромагнитного контакторов и других аппаратов с небольшими токами. Реле принято подразделять на две основные группы: реле управления и реле защиты. Реле управления предназначены для автоматического управления, регулирования и контроля; они воспринимают воздействие входного параметра и по достижении им определенной величины скачкообразно изменяют выходной параметр. Реле защиты отключают тот или иной участок электроустановки при нарушении нормального режима работы (прежде всего при коротких замыканиях и перегрузках). Конструкции и функции реле чрезвычайно разнообразны. По способу присоединения воспринимающего (чувствительного) элемента реле могут быть: первичными, включенными непо   ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 тельным приводом является и привод, в котором отдельны! механизм приводится в движение несколькими двигателями Например, для механизма поворота одноковшовых экскаваторов применяют двух-, четырех- и восьмидвигательные электроприводы.
тельным приводом является и привод, в котором отдельны! механизм приводится в движение несколькими двигателями Например, для механизма поворота одноковшовых экскаваторов применяют двух-, четырех- и восьмидвигательные электроприводы.