|
|
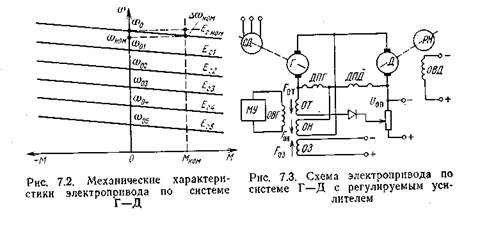
Электропривод по системе генератор — двигатель (Г—Д)Всистеме Г—Д, схема которой представлена на рис. 7.1, используется электромашинный преобразователь переменного тока в постоянный, состоящий из асинхронного или синхронного двигателя ДП и генератора Г, напряжение которого можно изменять в широких пределах. Обмотки возбуждения генератора ОВГ и двигателя ОВД получают питание от независимого источника постоянного тока возбудителя В (или от управляемого тиристорного преобразователя). В системе Г—Д любой режим работы двигателя Д (пуск, торможение, регулирование скорости, реверсирование) можно получить изменением величины и полярности подводимого к его якорю напряжения.
Уравнение механической характеристики системы Г—Д
где Rя — сопротивление цепи якоря, состоящей из сопротивлений якоря двигателя Rя.д, якоря генератора R я.ги соединительных проводов rпр (Rя=Rя.д+Rя.г+rпр); Ег — э. д. с. генератора. Каждому значению Ег соответствует своя скорость идеального холостого хода Следовательно, изменяя э. д. с, можно регулировать скорость вращения двигателя Д. При этом механические характеристики системы Г—Д представляют собой семейство параллельных прямых, жесткость которых остается неизменной. На рис. 7.2 представлены механические характеристики системы Г—Д при различных значениях э. д. с. генератора. Реверсирование двигателя Д осуществляется изменением.направления тока в обмотке возбуждения генератора. При этом меняется знак э. д. с. ЕТ и, следовательно, направление вращения двигателя.
Диапазон регулирования скорости вращения двигателя для системы Г—Д, при регулировании током возбуждения генератора, равен 7—15. Расширение диапазона регулирования до 14—30 можно осуществить ослаблением магнитного потока двигателя. Применение замкнутых систем управления позволяет расширить диапазон регулирования до 200: 1. На рис. 7.3 приведена схема системы Г—Д с регулируемым усилителем в качестве возбудителя. Усилитель имеет несколько обмоток управления, что позволяет осуществлять обратные связи по напряжению, току, угловой скорости и т. д., тем самым создать замкнутую систему управления. Следует отметить, что в качестве возбудителя может при Обмотка ОЗ является задающей и служит для регулирования величины и полярности э. д. с. генератора, а следовательно, величины и направления угловой скорости двигателя. Обмотка ОН включена параллельно обмотке якоря генератора и осуществляет отрицательную обратную связь по напряжению генератора, т. е. намагничивающая сила (н. с.) обмотки ОН направлена встречно н. с. обмотки ОЗ.
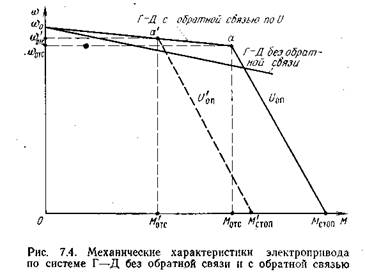
Обмотка ОТ включена на падение напряжения в обмотках дополнительных полюсов генератора ДПГ и двигателя ДПД, которое пропорционально току главной цепи. Ток в обмотке ОТ будет протекать только в случае, если I(Rдпг + Rдпд) будет больше опорного напряжения Uon. Рассмотрим действие обратных связей системы. Обратная отрицательная связь по напряжению служит для компенсации снижения напряжения на зажимах двигателя при увеличении нагрузки, т. е. тока в цепи якоря и, следовательно, увеличения жесткости механической характеристики привода. При работе двигателя вхолостую угловая скорость двигателя определяется э. д. с. генератора, а последняя — э. д. с. усилителя, созданной регулирующей и. с. При увеличении тока нагрузки появляется падение напряжения в цепи якоря, что вызывает уменьшение напряжения на зажимах двигателя. Это должно привести к снижению угловой скорости двигателя, но снижение напряжения вызовет уменьшение н.с. обмотки ОН, следовательно, возрастет результирующая н. с..Fрез и э. д. с. генератора. Этим будет компенсировано снижение скорости двигателя. Механические характеристики без обратной связи и с обратной связью показаны на рис. 7.4. Обратная отрицательная связь по току применяется для создания экскаваторной механической характеристики системы. При увеличении нагрузки увеличивается падение напряжения I(Rппг+Rяпд. Если это падение напряжения превысит опорное напряжение Uon, то в обмотке ОТ (см. рис. 7.3) будет протекать ток, создающий н. с, направленную встречно н. с. обмотки ОЗ. Результирующая н. с, Fрез = F 03— F0H — Fот начнет уменьшаться, будет уменьшаться э. д. с. генератора и, следовательно, угловая скорость двигателя. Ток, при котором начинается действие обратной связи по току, называется током отсечки Iотс. На рис. 7.4 механическая характеристика при токе I< Iотс изображена отрезком ω0— a, а при токе I> Iотс — отрезком а—Мстоп. Ток отсечки и стопорный момент можно изменять, изменяя величину опорного напряжения Uon. При Uоп'<Uоп механическая характеристика определяется отрезками ω0—а'—М’стоп. Таким образом, система Г—Д обладает широким диапазоном, высокой плавностью и экономичностью регулирования угловой скорости двигателя. Но она имеет и существенные недостатки: значительные капитальные затраты, поскольку общая установленная мощность электрических машин более чем в 3 раза превосходит мощность, требуемую рабочим механизмом; низкий к. п. д. установки в целом из-за троекратного преобразования энергии в электрических машинах; значительные эксплуатационные затраты. Привод по системе Г—Д является основным для привода рабочих механизмов одноковшовых экскаваторов.
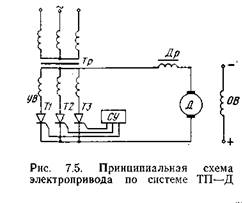
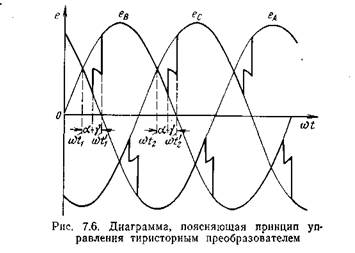
7.3. Электропривод по системе тиристорный преобразователь — двигатель (ТП — Д) Принципиальная схема электропривода по системе ТП—Д приведена на рис. 7.5. Электропривод содержит двигатель Д и тиристорный преобразователь переменного тока в постоянный, состоящий из управляемого выпрямителя УВ, сглаживающего дросселя Др, согласующего трансформатора Тр и системы управления СУ. На рис. 7.6 приведена диаграмма, поясняющая принцип управления тиристорным преобразователем. Выпрямление тока осуществляется тиристорами. С помощью управляющего электрода можно задержать на угол α начало пропускания тока тиристором. Этот угол отсчитывается от точки естественного открывания тиристора при отсутствии регулирования, которая соответствует пересечению кривых фазных э. д. с. вторичных обмоток трансформатора, и называется углом запаздывания. Таким образом, среднее напряжение уменьшается, так как открывание тиристора происходит не в точке естественного открывания, а в момент подачи положительного импульса на управляющий электрод, т. е. при угле ωt’1. Ток через тиристор Т1 протекает до угла ωt2', когда вступает в работу тиристор Т2.
Среднее значение выпрямленного напряжения в режиме холостого хода при отсутствии регулирования будет
где Еd0 — среднее значение выпрямленной э. д. с. при холостом ходе и отсутствии регулирования; Еф — действующее значение фазной э. д. с. обмотки трансформатора; m — число фаз.
Выпрямленный ток
где Едв— э. д. с. двигателя; ΔUB — падение напряжения в вентиле; ΣR — сумма сопротивлений обмоток трансформатора, дросселя и соединительных приводов. Выпрямленное напряжение для управляемого преобразователя
Наличие в системе ТП—Д индуктивных сопротивлений обмоток трансформатора и дросселя приводит к тому, что ток не увеличивается и не исчезает мгновенно. Существует промежуток времени, когда два вентиля одновременно проводят ток. Этот период называется временем перекрытия, а соответствующий ему угол — углом коммутации у (см. рис. 7.6).
Процесс коммутации вызывает дополнительное снижение выпрямленного напряжения и учитывается величиной где Х2 Т— индуктивное сопротивление вторичной обмотки трансформатора.
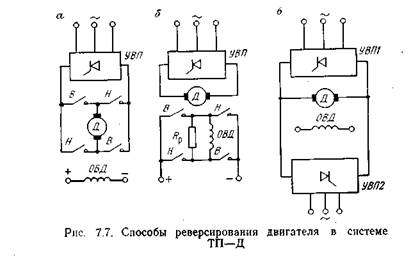
Электромеханическая характеристика системы ТП—Д описывается уравнением R2Т, R дри Rя — активные сопротивления обмотки трансформатора, дросселя и якоря двигателя. Для регулирования скорости двигателя в системе ТП—Д достаточно изменять угол регулирования α. Электромеханические характеристики системы ТП—Д имеют меньшую жесткость, чем характеристики системы Г—Д и нерегулируемую зону в области малых нагрузок. Реверсирование двигателя может осуществляться тремя способами (рис. 7.7): изменением полярности напряжения, подводимого к якорю двигателя реверсом в якорной цепи (рис. 7.7, а); изменением направления магнитного потока возбуждения двигателя реверсом (рис. 7.7, б) или реверсивным преобразователем; изменением направления тока якоря двигателя с использованием двух преобразователей УВП1 и УВП2, каждый из которых предназначен для питания двигателя при одном направлении тока якоря (рис. 7.7, в). Выбор способа реверсирования определяется назначением привода и способом электрического торможения.
7.4. Система электропривода переменного тока с управляемым статическим преобразователем частоты (УПЧ—Д) Регулирование скорости изменением частоты питающего напряжения для асинхронных двигателей обеспечивает наилучшие показатели по сравнению со всеми другими способами и позволяет использовать в регулируемом приводе асинхронные двигатели с короткозамкнутым ротором. Применение тиристорных преобразователей частоты делает перспективным электропривод УПЧ—Д с асинхронным двигателем с короткозамкнутым ротором. При этом обеспечивается регулирование скорости в пределах от (1,5÷2)ω0 (до 0,05÷0,1)ω0. Но при изменении частоты изменяется не только синхронная угловая скорость двигателя, но и его критический момент Мкр = U2ф/f12. Поэтому для сохранения постоянства перегрузочной способности двигателя необходимо с изменением частоты изменять и подводимое к двигателю напряжение по закону Uф / f1 = const. На рис. 7.8 приведена структурная схема электропривода по системе УПЧ—Д, которая представляет собой сочетание управляемого преобразователя УТП и автономного инвертора АИ. Механические характеристики привода по системе УПЧ-Д с асинхронным двигателем аналогичны механическим характеристикам привода по системе Г—Д.   ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|