
|
|
Розділ 1. Предмет теорії автоматичного керуванняСтр 1 из 25Следующая ⇒ К.О.Сорока
Навчальний посібник
Харків - ХНАМГ – 2006
Теорія автоматичного керування. Навчальний посібник (для студентів спеціальності 7.092202 “Електричний транспорт”) Авт. Сорока К.О. – Харків, ХНАМГ, 2006 – 187 с.
Автор: К.О.Сорока.
Рецензенти: д.т.н., професор ХНУРЄ В.П. Авраменко д.т.н., професор ХНАМГ О.Г. Гриб
Друкується за рішенням Вченої ради ХНАМГ як навчальний посібник для студентів електротехнічних спеціальностей, протокол № 1 від 29.09.06 р.
Вступ
Наукова дисципліна “Теорія автоматичного керування” (ТАК) вивчає закони керування в технічних системах, розробляє методи аналізу та синтезу (побудови) систем автоматичного керування (САК). Це один з розділів загальної науки про керування, яка має назву кібернетики. Академік Колмогоров А.М. так визначив напрямок цієї науки: “Кібернетика займається вивченням систем будь-якої природи, здатних сприймати, зберігати і переробляти інформацію і використовувати її для керування та регулювання”. Залежно від природи систем, які вивчаються, кібернетика може бути поділена на технічну, біологічну, економічну та ін. Розділ кібернетики, який відноситься до технічних систем, є теорією автоматичного керування. Людство у своєму розвиткові пройшло складний шлях від кам’яного віку до сучасного розвинутого технічного суспільства. Розвиток людства можна характеризувати такими етапами: · оволодіння матеріальним світом, засобами виробництва, оборони, життєзабезпечення; · оволодіння енергією, спочатку енергією вітру, води, тепловою енергією, електроенергією, атомною енергією; · оволодіння інформацією. Інформація стає основною продуктивною силою. Хто володіє інформацією, той володіє світом. Наукова дисципліна „Теорія автоматичного керування” вивчає закони керування переважно з інформаційної точки зору. Предметом теорії автоматичного керування є вивчення законів керування та регулювання роботи найрізноманітніших апаратів, машин, технічних систем, а також живих організмів, соціальних, організаційних та інших систем створених природою і людиною. Завданнями ТАК такі: - збір та аналіз інформації про властивості САК і умови їх використання; - вивчення функцій, які виконують в САК різної фізичної природи; - розробка методів аналізу САК; - визначення принципів роботи САК і законів керування; - синтез алгоритмів керування; - створення пристроїв, що реалізують високоефективні алгоритми керування. Під час вивчення цих процесів максимально абстрагуються від фізичних і конструкційних особливостей конкретних систем. Теорія автоматичного керування – це суто теоретична дисципліна, яка заснована на сучасному математичному апараті. Вона розглядає адекватні математичні моделі систем керування, тому основним методом дослідження в ТАУ є математичне моделювання. При цьому використовуються: - теорія диференційних рівнянь; - операційне числення (перетворення Лапласа); - гармонічний аналіз ( перетворення Фур’є); - розділи теорії комплексної змінної. Для успішного оволодіння курсом треба повторити такі розділи з вивчених раніше предметів: Математика: Комплексні та уявні числа, форми представлення комплексних чисел, зв’язок між ними. Диференційні рівняння, лінійне однорідне і неоднорідне рівняння, системи диференційних рівнянь. Операційне числення. Перетворення Лапласа. Вирішення диференційних рівнянь методами операційного числення. Перетворення Фур’є. Ряд Фур’є та інтеграл Фур’є. Методи спектрального аналізу. Електротехніка: Основи електротехніки. Рівняння електричного кола. Змінний електричний струм. Перехідні процеси в електричному колі. Розділ 1. Предмет теорії автоматичного керування
Основні поняття ТАК
Алгоритм – упорядкована сукупність правил, точне виконання яких приводить до потрібного кінцевого результату. Алгоритм, це одне із основних понять математики і кібернетики. Поняття алгоритм було введене узбецьким вченим 9-го століття Аль-Хорезмі і визначало порядок розвязання певного класу математичних задач. В сучасному понятті під алгоритмом розуміємо записаний певною мовою, або визначений певним чином, порядок виконання дій, що веде до вирішення поставленого завдання. В кібернетиці та теорії керування алгоритм, як правило, визначає порядок роботи з інформацією. Алгоритм функціонування – сукупність правил чи вимог, які визначають потрібне здійснення робочого процесу певним об’єктом (пристроєм, технічною, природною чи організаційною системою) . Алгоритм керування – сукупність правил, які визначають характер дій на об’єкт керування (ОК) з метою підтримання його алгоритму функціонування. Керування – процес дії на об’єкт у відповідності з алгоритмом керування. Система автоматичного керування – це сукупність об’єкта керування та пристрою автоматичного керування (ПАК), які взаємодіють між собою з метою забезпечення заданого алгоритму функціонування. Іншими словами систему автоматичного керування можна визначити, як систему, що складається з об’єкта керування та пристрою керування, в якій керування чи регулювання режимом роботи об’єкта, відповідно до алгоритму керування, здійснюється автоматично без участі людини.
Рис. 1.1 – Функціональна схема системи автоматичного керування
Схематично система автоматичного керування зображена на рис.1.1. САК складається з об’єкта керування (ОК), керування режимом роботи якого здійснюється за допомогою пристрою автоматичного керування (ПАК) (подекуди вживають поняття регулятор (Р)). Стрілками на схемі показано величини, які забезпечують роботу системи, а саме: · Об’єкт керування (ОК)– це певний пристрій, технічна, природна чи організаційна система алгоритм функціонування якого у даній САК підтримується з потрібною точністю. · Пристрій автоматичного керування (ПАК) – пристрій, який забезпечує виконання алгоритму керування автоматично, без участі людини. · Uвх(t) – задаюча (вхідна) величина (задаючий сигнал) – величина, яка відповідає дії людини на САК і задає певний алгоритм функціонування об’єкта, тобто задає потрібний режим його роботи. · Uрег(t) – керуюча (регулююча) величина (сигнал регулювання) – дія пристрою автоматичного керування на об’єкт з метою підтримання його алгоритму функціонування. · Uвих(t) – вихідна величина (вихідний сигнал) – результат роботи системи, параметри роботи системи, які описуються в алгоритмі функціонування. · f(t) –збурююча дія (сигнал збурення) – зовнішня дія на об’єкт, яка призводить до зміни вихідних величин більших ніж допускається алгоритмом функціонування. Вихідна величина системи Uвих(t) – це результат роботи систем. Це та фізична величина (сукупність величин), яка визначається в алгоритмі функціонування, на дотримання якої в заданих межах направлене керування. Вихідний сигнал - це інформація про значення вихідної величини. Керуюча дія – це дія пристрою керування Uрег(t), це певна фізична, електрична, механічна чи інша реакція пристрою керування, яка передається до об’єкта керування і змінює режим його роботи, приводить функціонування об’єкта у відповідність з алгоритмом функціонування. Сигнал регулювання - це значення величини керуючої дії. Збурення, чи збурююча дія f(t) – це всі можливі впливи, які порушують режим роботи системи, ведуть до порушення алгоритму функціонування у границях більших допустимих. Через дію збурення система змінює режим роботи і через нього виникає потреба здійснювати автоматичне регулювання. Сигнал збурення - це інформація про значення збурюючої дії. Теорія автоматичного керування вивчає процеси керування на найбільш загальному, абстрактному рівні. Вона вивчає загальні закони керування незалежно від природи конкретної системи. Тому у ній абстрагуються від конкретної фізичної природи системи і діючих в ній величин і розглядають тільки їх значення. Під час абстрагування поняття фізичної величини заміняють поняттям сигнал, розуміючи під сигналом інформацію про значення конкретної величини. Під поняттям величина (вхідна, вихідна, збурююча величина і т.п.) розуміють конкретну фізичну величину, яка діє на систему з врахуванням її фізичної природи. Наприклад температура, напруга, швидкість обертання, світловий потік, і т.п. Поняття величина використовують у випадках коли пояснюють роботу конкретної реально існуючої системи керування. Поняттям сигнал використовують під час теоретичного вивчення закономірностей роботи систем керування, вивчення принципів керування, законів керування. В даному випадку не має значення фізична сутність величини, а відіграє роль тільки її значення. Під поняттям сигнал (вхідний сигнал, задаючий сигнал, збурюючий сигнал, вихідний сигнал і т.п.) розуміють інформацію про значення величини (вхідної, задаючої., збурюючої), без урахування її конкретної фізичної природи. У випадку, коли йде мова про конкретну систему, коли результати теорії потрібно використати для опису роботи певної технічної системи, тоді поняття сигнал міняють конкретною фізичною величиною, як наприклад напругою, силою, положенням ручки регулятора тощо. Слід зауважити, що існує два поняття - керування і регулювання. Відповідно до цього розрізняють теорію керування та теорію регулювання. Керування – це більш загальне поняття охоплює значно ширше коло задач. Теорія автоматичного регулювання займається питаннями регулювання режимів роботи систем. Закони ТАК - це, переважно, закони регулювання. Тому раніше розділяли наукові дисципліни і виділяли теорію автоматичного регулювання як окрему наукову дисципліну. Термін „теорія регулювання” дещо точніший, більш точно визначає предмет вивчення. Але керування - більш загальне поняття в останній час цей термін є більш вживаним і ним ми будемо тут користуватися.
Приклади САК
З прикладами систем автоматичного керування ми зустрічаємось на кожному кроці і в побуті, і на виробництві, і в живій природі. Практично ніяка більш-менш складна технічна система не може обійтися без систем автоматичного керування. Приклади таких систем показано на рис 1.2 – 1.21 Розглянемо деякі з них. Візьмемо побутову техніку. Холодильник, електричний утюг, радіоприймач, магнітофон, телевізор. Вся ця та інша техніка має у своєму складі або сама повністю є системою автоматичного керування. Більш серйозна техніка – регулятор швидкості паровоза, генератор електростанції із системою регулювання частоти струму та напруги, зенітна ракета, місяцехід, система орієнтації супутника, атомний реактор та багато інших також є системи автоматичного керування. Системи живої природи – система забезпечення постійного хімічного складу лімфи, регулювання кровообігу, система регулювання розміру зіниці ока та ін. – це також системами автоматичного керування. Розглянемо приклади систем керування відповідно до наведеної загальної схеми. Електричний утюг. Алгоритм функціонування САК утюга – це підтримання постійної високої температури поверхні. Утюг має пристрій керування, який забезпечує постійний нагрів. Об’єкт керування – нагрівач разом з корпусом. Вхідна величина – положення ручки регулятора, вихідна – температура поверхні, збурюючі величини – тканина, яка охолоджує утюг, зовнішнє середовище. Радіоприймач. Кожен радіоприймач має систему автоматичного регулювання підсиленням (АРУ). Радіохвилі, які приходять до антени, через ефірні перешкоди змінюються за величиною. Якщо в приймачі після детектування підсилити ці хвилі, то рівень звуку з часом буде змінюватись. Слухати такий приймач не досить приємно. Система АРУ забезпечує постійний рівень звуку в динаміку. Отже алгоритм функціонування АРУ є підтримання постійного рівня звуку в динаміку. Розгляньте самостійно які величини тут є задаючою, вихідною та збурюючою. Магнітофон – містить система автоматичного підтримання постійної швидкості переміщення магнітної стрічки. Алгоритм функціонування САК механікою магнітофона є підтримання постійної швидкості обертання тонвала. Телевізор – містить ряд систем автоматичного регулювання як от система підтримання постійної яскравості екрану, постійної сили звуку, система автоматичної настройки на частоту радіостанції та ін. Холодильник (див. рис. 1.2) забезпечує постійну температуру продуктів. Алгоритмом його функціонування є підтриманні постійної низької температури в корпусі. В ньому є блок керування та холодильний агрегат (термостат), який забезпечується постійну температура в корпусі холодильника. Задаючою (вхідною) величиною є температура, встановлена положенням ручки регулятора, а вихідною величиною – температура продуктів у холодильнику. Під час роботи холодильника двигун прокачує теплоносій. Розширяючись в камері термостата теплоносій охолоджує її. Регулювання температури здійснюється за допомогою сифона, який перекриває клапан і не дає щоб теплоносій розширювався в камері термостата. Керуюча дія це перекривання клапана камери термостата. Збуруюча дія – це вплив навколишнього середовища, відкривання дверей і закладання теплих продуктів тощо. Алгоритмом функціонування ядерного реактора є підтримання постійного потоку нейтронів Система автоматичного регулювання потоку нейтронів у ядерному реакторі (див. рис. 1.3) керує ходом термоядерної реакції. В разі збільшення потоку нейтронів у реактор опускаються стержні сповільнювача реакції, які поглинають надлишкові нейтрони, чим хід реакції сповільнюється. Автоматичне регулювання випуску продукції на підприємстві (див. рис. 1.4) здійснюється завдяки поверненню в цикл виробництва фінансових ресурсів від реалізації продукції. Алгоритмом функціонування підприємства є отримання прибутку на певному рівні. Регулювання напруги генератора (див рис.1.5).здійснюється за рахунок того, що значення вихідної напруги подається, через пристрій регулювання, на обмотку збудження генератора. Зенітна ракета – автоматично стежить за переміщенням цілі й рухається в її напрямку. Алгоритмом САК ракети є підтримання її руху в напрямку цілі. Вхідна величина – напрямок на ціль, який визначається радіолокатором, звуковим чи інфрачервоним датчиком. Вихідна величина – напрямок фактичного руху ракети за азимутом та кутом до горизонту. Збурюючі дії – атмосферні потоки, маневри цілі та ін. Система автопілот, яка керує курсом літака та система підтримання курсу торпеди (див. рис. 1.9; 1.10) мають майже однакове призначення, проте реалізовані вони по різному. Основою таких систем є гіроскоп, який задає вибраний напрямок для орієнтації в просторі. Генератор електростанції. Завдання системи автоматичного керування генератора – забезпечити постійну частоту струму та постійну величину напруги. У живій природі досить багато процесів також здійснюються автоматично (див. рис.1.17, 1,18). Однією з таких систем є система автоматичного регулювання розмірів зіниці ока, яка забезпечує саме сприятливе освітлення сітківки і дає можливість бачити предмети під час різкої зміни їх яскравості. Керуючим пристроєм у даному випадку є мозок, який, поза нашою свідомістю, подає сигнали на мускули і заставляє звужувати чи розширювати сітківку ока. Приклади регуляторів цих та ряду інших систем показано на рис. 1.2 – 1.19.
Рис. 1.2– Регулятор температури в холодильнику.
Рис. 1.3 – Система автоматичного регулювання потоку нейтронів у ядерному реакторі.
Рис. 1.4 – Система регулювання виробництва продукції на фабриці.
а)
б) Рис. 1.5 – Регулятори напруги генератора а) з використанням лампового каскаду, б) з використанням операційного підсилювача.
Рис. 1.6 – Система регулювання швидкості обертання парової машини, регулятор Уатта (К1, К2 – масивні кулі, М – муфта, РО – регулюючий орган, Q – подача пари, О – паровий двигун).
Рис. 1.7 – Система регулювання швидкості обертання непрямої дії (К1, К2 – масивні кулі, М – муфта, РО – регулюючий орган, Q – подача пари, О – паровий двигун, З – золотник, ГП – гідропідсилювач, Qм – потік масла, П – поршень
Рис. 1.8 – Слідкуюча система регулювання кута повертання з механічним зворотним зв’язком
Рис. 1.9 – Система «автопілот»
Рис. 1.10 – Регулятор курсу торпеди
Рис. 1.11 – Регулятор обертів непрямої дії (Дв – двигун, Тг – тахогенератор, + – Uo – задатчик, ЕМУ – електромагнітний підсилювач.
Рис. 1.12 – Комбінована система регулювання обертів (Та ж, що на попередній схемі з додатковою вимірювальною муфтою, що вимірює навантаження на валу)
Рис. 1.13 – Системи регулювання температури середовища шляхом подавання холодного повітря Q КШ – поляризоване реле.
Рис. 1.15 – Пристрій подачі імпульсної напруги
Рис. 1.16 - Система автоматичної орієнтації супутника
Рис. 1.17 – Регулювання освітленості сітківки ока (розмірів зіниці)
Рис. 18 – Регулювання хімічного складу в тканинах організму
Рис. 1.19 – Регулятор Уатта
Розглянемо більш детально конструкцію деяких регуляторів. На рис. 1.6; 1.7; 11.19 представлено відцентровий регулятор, призначений для підтримання постійної швидкості обертання вала парової машини, винайдений англійським механіком Джеймсом Уаттом в 1784 р. Вперше він був установлений на паровозі. Принцип дії його такий: регулятор має дві масивні кулі, підвішені шарнірно на осі. Вісь разом з кулями приєднана до валу парової машини. Під час обертання кулі розходяться. Сили, які зумовлюють положення стержнів регулятора, це: відцентрова сила реакції куль – Fц, і сила ваги куль – Р. При збільшенні швидкості обертання стержні відхиляються на більший кут, оскільки відцентрова сила збільшується. Реакція стержня та вага куль у сумі забезпечують доцентрову силу, потрібну для обертання куль. Муфта – М при цьому піднімається і переміщує важіль – В. Перекривається канал доступу пари і оберти машини зменшуються.
Рис. 1.20 – Статичний регулятор рівня води
Рис. 1.21 – Астатичний регулятор рівня води (регулятор непрямої дії).
Регулятор рівня води схематично показаний на рис. 1.20. Тут об’єктом керування є бак, в якому підтримується потрібний рівень води. Регулятором служить поплавок, з’єднаний за допомогою важеля з голчастим клапаном. При зниженні рівня води клапан переміщується і відкриває потік води. При постійному потоці води, що витікає, клапан знаходиться у певному відкритому положенні, вода поступає в бак і рівень води вирівнюється. На рисунку показано графік регулювання, в якому видно залежність рівня води від швидкості витікання води з бака Q. Рівень залежить від швидкості витікання води. На рис.1.21 показано аналогічний регулятор рівня. Тут, на відміну від попереднього регулятора, регулюючий орган (клапан) переміщується двигуном Д. На двигун подається напруга, яка залежить від положення поплавка. Цей регулятор забезпечує постійний рівень води не залежно від швидкості її витікання. Порівняння цих регуляторів показує, що в першому випадку ми маємо регулятор прямої дії, а в другому – регулятор непрямої дії. Але для нас важливішою є робота цих регуляторів. Якщо графік регулювання першого регулятора в динамічному режимі (тобто при відкритому вихідному крані) має вигляд нахиленої лінії, то другий регулятор має графіком регулювання горизонтальну лінію. Це зумовлюється принципом роботи регулятора. У подальшому, коли будемо вивчати питання точності регулювання більш детально розглянемо процеси регулювання. Відмітимо тут тільки, що перший регулятор називають статичним, а другий астатичним.
Контрольні запитання перевірки засвоєння навчального матеріалу
1. Вивченням яких питань займається кібернетика? 2. Які системи відносять до систем автоматичного керування? 3. Яка роль керування в сучасному світі? 4. Які перші регулятори, створені людиною, ви знаєте? 5. Що таке алгоритм? 6. Наведіть приклади алгоритмів. 7. Що таке алгоритм функціонування? 8. Чи можна здійснити регулювання роботи сучасних технічних пристроїв без автоматичного керування? Наведіть приклади. 9. У чому різниця між регуляторами прямої і непрямої дії? 10. Яку величину називають збурюючої, в чому особливість її дії? 11. Розгляньте різноманітні схеми систем керування, подумайте, у яких випадках можна обійтись без автоматичного керування? 12. Чим відрізняються регулятори прямої і непрямої дії, показані на рис. 1.6 і 1.7? 13. Чи існують системи автоматичного регулювання в живій природі? Наведіть приклади. 14. Чи існують системи регулювання в суспільстві? Наведіть приклади 15. Поясніть, як працює зіниця ока. 16. Який регулятор з наведених на рисунках ви вважаєте найбільш складним? 17. За допомогою якого пристрою можна змінювати значення температури в холодильнику, показаному на рис. 1.2? 18. Поясніть. як працює регулятор Ватта, показаний на рис. 1.19? 19. Розгляньте побутові пристрої, які знаходяться у вас в квартирі. Які з них ви можете віднести до систем, що мають автоматичне керування чи регулювання? 20. Чи є с домашньому телевізорі системи автоматичного керування? Що вони виконують? 21. Чи є в автомобілі системи автоматичного керування? Які це системи? 22. Назвіть хоча б короткий перелік пристроїв, які можуть входити в склад систем автоматичного керування? 23. Яку роль відіграє автоматичне керування в сучасній техніці, в суспільстві. в живих організмах. 24. Наведіть приклади систем автоматичного керування у живій природі. Режими роботи САК
Будь-яка САК працює в двох режимах, а саме: · усталеному, · перехідному. Усталений режим роботи системи - це режим, в якому незмінною в часі є похибка регулювання. Цей режим установлюється по завершенні перехідних процесів. Розрізняють такі установлені режими роботи: · статичний, · динамічний. Статичний усталений режим наступає тоді, коли незмінними в часі є задаюча і збурююча дії при незмінних параметрах системи, в результаті чого незмінною залишається вихідна величина системи. Динамічний усталений режим наступає тоді, коли задаюча, збурююча чи вихідна величина змінюється за постійним в часі законом і похибка регулювання системи залишається незмінною. Наприклад, динамічні режими можуть бути, коли задаюча величина змінюється за синусоїдальним законом, коли вона змінюється з постійними в часі швидкістю чи прискоренням. Динамічним режимом є, наприклад, режим роботи регулятора рівня, коли рідина з резервуара витікає з постійною швидкістю. Перехідний режим - це такий режим роботи системи, коли вона переходить з одного встановленого режиму роботи до іншого. Цей режим наступає тоді, коли змінюється задаюча величина і систему переводять з одного режиму роботи до іншого, або змінюється величина збурення чи змінюються параметри системи. Перехідний процес у різних системах керування проходить по різному. Змінюючи параметри системи можна змінити характер перехідного режиму. Під час вивчення роботи та проектування САК значна увага приділяється вивченню роботи системи в перехідних режимах. Якщо в електротехнічних установках перехідні процеси займають відносно малу частку часу, але вони суттєво впливають на вимоги до установок, то в САК перехідні режими є основними режимами роботи, займають переважну частину часу і саме вони визначають вимоги до САК і методи вивчення ТАК Перехідні режими – це найбільш суттєві режими роботи систем керування. Системи керування призначені для того, щоб працювати в перехідних режимах. Це зумовлює складність САК, вимагає використання складних математичних методів аналізу цих систем. Всі методи аналізу основані на використанні диференційних рівнянь.
Рис. 2.1 – Перехідні процеси в САК
Вимоги до САК Будь-яка САК повинна забезпечити: 1) стійкість керування; 2) потрібну точність керування; 3) якість роботи, що визначається характеристиками перехідних режимів роботи. Стійкість керування – це характеристика, яка визначає можливість практичного використання системи керування. Якщо для технічних систем ми визначаємо стан системи як справна чи несправна, несправна – значить непридатна для практичного використання, то для систем керування визначаємо, чи стійка система керування чи нестійка. Нестійка система керування - це система, не придатна для практичного використання, тобто це синонім несправної системи. Стійкість системи – це здатність системи повертатись до попереднього чи близького до нього стану після певної дії на систему. Стійка система – це система, яка після того як на неї подіяла інша система, змінився характер взаємодії системи з іншими, чи змінились параметри самої системи, повертається до попереднього або близького до нього стану. Нестійка система, після певної дії на неї, вже не повертається до попереднього стану, а відхилення від цього стану у неї збільшується. Демонструвати властивості стійкості систем прийнято на простому механічному прикладі. На рис. 2.2 показано кульку, яка знаходиться в певних умовах.
Рис. 2.2 – Приклади стійкої та нестійкої системи а) стійка система; б) нестійка система; с) система стійка «в малому» та нестійка «у великому».
Рис. 2.2а - демонструє стійку систему: кулька після дії на неї і відхилення її з точки рівноваги повертається в попереднє положення. Рис. 2.2б - демонструє нестійку систему, тут, якщо ми кульку відхилимо від положення рівноваги, то вона вже ніяк не повернеться в початковий стан. Третій приклад, рис. 2.2в - демонструє стійку систему в малому й нестійку у великому. При малих відхиленнях система стійка, повертається в початковий стан, але при великих відхиленнях система нестійка. Цей приклад характерний для нелінійних систем. Якщо лінійні системи, які ми переважно будемо вивчати у цьому курсі, є стійкими в малому, то вони є стійкими і у великому. Нелінійні системи можуть бути стійкими при малих діях і нестійкими при великих. Питання стійкості систем керування є одним з визначальних. Як вже було відмічено нестійкість системи керування є аналогом несправності системи. Хоча система може бути повністю справною, але параметри її такі, що керування нестійке. Такі системи експлуатувати не можна. Прикладів нестійких систем керування багато. Наведемо найбільш відомі. Відомий усьому світу приклад – це реактор Чорнобильської АЕС. В якомусь з режимів роботи керування реактором виявилось нестійким. Виведений зі стану рівноваги реактор не зміг повернутись назад до такого стану і в результаті стався вибух, який призвів до найбільшої у світі ядерної катастрофи. Ще один приклад – це ракета, яка декілька років тому потрапила в будинок у Броварах біля Києва. Система керування ракети виявилась нестійкою, в результаті ракета втратила керування та попала в жилий будинок. Можна продемонструвати приклад стійкості системи керування на простому життєвому прикладі. При навчанні водіїв автомашин перші кроки керування приводять до того, що автомашина відхиляється від дороги, потрапляє на перешкоди на узбіччі. Чому це відбувається? Тому, що характеристики системи керування незадовільні, реакція молодого водія невідповідна. Водій, коли автомашина відхиляється від потрібного напрямку руху, реагує надто сильно і повертає руль сильніше ніж це треба. Виникає ще більше відхилення від напрямку, тільки вже в інший бік. Дії молодого водія приводять до того, що автомашина все сильніше відхиляється від напрямку руху і попадає на перешкоду, як це показано на рис. 2.3.
Рис. 2.3 – Приклад нестійкої системи керування. Шлях руху водія – початківця
Щоб цього не траплялось, перші кроки водіння виконують на достатньо широкій площадці. У подальшому, коли водій набуде практики, його реакція буде узгоджена із системою керування і такі випадки не трапляються. Отже, аналіз стійкості систем керування – одне з визначальних питань. І в подальшому ми йому приділимо достатньо уваги. Точність керування. Точність керування визначається похибкою керування в усталеному режимі роботи. Похибка керування показана на рис.2.3 – це різниця між потрібним значенням вихідної величини, яке обумовлене значенням задаючого сигналу і фактичним значення, яке є на виході системи. Потрібна точність керування - важлива вимога до САК. Зрозуміло, що для практичного використання придатні тільки ті систем, які забезпечують потрібну точність регулювання. Наприклад, якщо система керування зенітною ракетою матиме недостатню точність, то ракета не попаде в ціль, тому така ракета не придатна для військових цілей. Другий приклад, якщо система керування генератором електростанції не забезпечує потрібної частоти струму, то такий генератор не потрібний. Експлуатаційні характеристики систем керування визначає якість перехідних процесів. Від характеристика перехідних процесів залежить як САК вони працюють умовах керування. Ці характеристики визначаються часом перехідного процесу, амплітудою коливань під час перехідного процесу, їх частотою та іншими характеристиками.
Принципи керування
Робота усіх типів САК, приклади яких було розглянуто в, заснована тільки на двох принципах керування, а саме: 1) керуванні за збуренням; 2) керуванні за відхиленням. Крім цього використовують і: 3) комбіноване керування. Розглянемо ці принципи керування. Керування за збуренням Функціональна схема такого керування показана на рис. 2.4.
Рис.2.4 – Керування за збуренням
Тут ПК – пристрій керування (або регулятор), О – об’єкт керування, Uз(t) – задаючий сигнал, Uкер(t) – сигнал керування, Uвих(t) – вихідний сигнал, fз(t) – сигнал збурення. Керування у даній системі здійснюється з урахуванням значення збурюючої величини. Величина збурення вимірюється і сигнал про її значення подається на вхід керуючого пристрою. Керуючий пристрій аналізує значення сигналу збурення і виробляє керуючу дію на об’єкт керування. Сигнал цієї дії показано на функціональній схемі у вигляді стрілки Uкер(t). Такий принцип керування має назву принципу Пенселе – Ніколаєва. Його деколи називають компенсаційним керуванням. Назва відображає той факт, що в даному випадку в результаті керування компенсується вплив збурюючої величини.
Керування за відхиленням Схема керування за відхиленням показана на рис. 2.5.
Рис. 2.5 – Керування за відхиленням
Тут показано зворотній зв’язок. На виході системи вимірюється значення вихідної величини. Сигнал про це значення подається на пристрій керування. Пристрій керування виробляє керуючий сигнал, який залежить від різниці задаючого сигналу та вихідного сигналу (сигналу зворотного зв’язку). Такий принцип керування має назву принцип Ползунова – Уатта. Класифікація САК
Різноманітність систем автоматичного керування приводить до того, що виникає необхідність їх об’єднати певною системою класів, класифікувати за певними ознаками. Різноманітність ознак САК приводить до того, що існує багато систем їх класифікації. Ми розглянемо найбільш вживані. І. Класифікація за принципом робота (алгоритмом керування): · розімкнуті; · замкнуті; · комбіновані. До розімкнутих відносять системи, в яких керування здійснюється за збуренням. Прикладом, такої системи може бути автоматизована районна котельня, яка подає гарячу воду в систему теплозабезпечення мікрорайону. Регулювання температури теплоносія в ній може здійснюватись залежно від температури навколишнього середовища. До замкнутих відносять системи, яких здійснюється керування за відхиленням. Прикладом таких систем є регулятор Уатта, який було розглянуто раніше. До комбінованих систем керування відносять ряд складних систем, які встановлюють в автомобілях, в гідро - та теплогенераторах, найрізноманітнішій складній техніці. Ці системи мають декілька контурів регулювання. Приклад такої системи показано на рис. 1.11. ІІ. Класифікація за кількістю контурів регулювання: · одноконтурні; · двохконтурні; · багатоконтурні САК. Системи з комбінованим керуванням є багатоконтурні САК. Ш. Класифікація за характером зміни задаючої величини (за призначенням системи, або за алгоритмом керування). У різних підручниках використовується різна назва: · системи стабілізації; · слідкуючі системи; · системи програмного керування. Системи стабілізації - це такі системи, в яких задаюча величина є постійною, а завданням системи керування є забезпечення постійного значення вихідної величини. Прикладом таких систем може бути холодильник, АРУ радіоприймача, генератор електричного струму, регулятор швидкості двигуна і т.п. Слідкуючі системи - це такі системи, в яких вхідна величина змінюється випадковим чином а завданням системи є забезпечення відповідної зміни вихідної величини. Прикладом таких систем є системи керування зенітним вогнем, ракета типу земля-повітря, торпеди, копіри для розкрою металу, тканини і т.п. Системи програмного керування - це системи у яких задаюча величина змінюється за відомим наперед законом і завданням системи є забезпечення відповідної зміни вихідної величини. Прикладом таких систем є станки з програмним керування, теплові печі для теплової обробки металів і т. п. У принципі їх робота аналогічна слідкуючим системам, але оскільки закон зміни вхідної величині відомий, то такі САК можуть бути дещо простішими за своєю будовою. ІV. Класифікація за кількістю вихідних координат системи: · одномірні; · багатовимірні. Одномірні системи - це системи, які керують тільки за однією вихідною величиною, наприклад, холодильник, двигун з ре   ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|








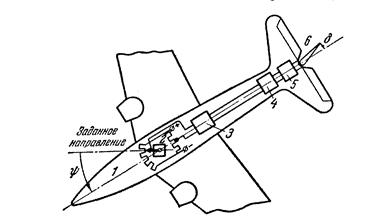



 Рис. 1.14 – Системи регулювання положенням керованого об’єкта.
Рис. 1.14 – Системи регулювання положенням керованого об’єкта.










