
|
|
Місце ТАК серед інших наукових дисциплін
Розвиток теорії автоматичного керування почався з 30-х років ХХ ст., коли були відкриті закони регулювання та вирішені задачі стійкості систем регулювання. Перші регулятори з’явилися в кінці ХІІХ ст. на початку технічного прогресу людства (1784 року). Призначені вони були для керування роботою парових машин. Робота технічних пристроїв, таких як парові машини, паровози та інші, без регуляторів неможлива. Тільки створення автоматичних регуляторів дало поштовх технічному прогресові. Майже вся сучасна техніка працює автоматично або має автоматичні режими роботи. Це електростанції, турбіни, телевізори, холодильники та ряд інших систем, чи машин. Засоби автоматики прийнято поділяти на: · Засоби автоматики й телемеханіки. · Системи автоматичного керування (САК). · Автоматизовані системи керування (АСУ). Засоби автоматики та телемеханіки - це, як правило, найбільш прості пристрої: автоматичні вимикачі, реле, реле-регулятори та ін. Принципи їх роботи вивчає наукова дисципліна «Автоматика та телемеханіка». Системи автоматичного керування - це сукупність пристроїв автоматики та об’єктів керування. Динаміку роботи цих систем вивчає теорія автоматичного керування. Автоматизовані системи керування – це людино-машинні системи, призначені для керування великими комплексами, підприємствами. Це системи, що включають сучасну обчислювальну техніку, яку обслуговують і роботою яких керують люди.
Основні поняття ТАК
Алгоритм – упорядкована сукупність правил, точне виконання яких приводить до потрібного кінцевого результату. Алгоритм, це одне із основних понять математики і кібернетики. Поняття алгоритм було введене узбецьким вченим 9-го століття Аль-Хорезмі і визначало порядок розвязання певного класу математичних задач. В сучасному понятті під алгоритмом розуміємо записаний певною мовою, або визначений певним чином, порядок виконання дій, що веде до вирішення поставленого завдання. В кібернетиці та теорії керування алгоритм, як правило, визначає порядок роботи з інформацією. Алгоритм функціонування – сукупність правил чи вимог, які визначають потрібне здійснення робочого процесу певним об’єктом (пристроєм, технічною, природною чи організаційною системою) . Алгоритм керування – сукупність правил, які визначають характер дій на об’єкт керування (ОК) з метою підтримання його алгоритму функціонування. Керування – процес дії на об’єкт у відповідності з алгоритмом керування. Система автоматичного керування – це сукупність об’єкта керування та пристрою автоматичного керування (ПАК), які взаємодіють між собою з метою забезпечення заданого алгоритму функціонування. Іншими словами систему автоматичного керування можна визначити, як систему, що складається з об’єкта керування та пристрою керування, в якій керування чи регулювання режимом роботи об’єкта, відповідно до алгоритму керування, здійснюється автоматично без участі людини.
Рис. 1.1 – Функціональна схема системи автоматичного керування
Схематично система автоматичного керування зображена на рис.1.1. САК складається з об’єкта керування (ОК), керування режимом роботи якого здійснюється за допомогою пристрою автоматичного керування (ПАК) (подекуди вживають поняття регулятор (Р)). Стрілками на схемі показано величини, які забезпечують роботу системи, а саме: · Об’єкт керування (ОК)– це певний пристрій, технічна, природна чи організаційна система алгоритм функціонування якого у даній САК підтримується з потрібною точністю. · Пристрій автоматичного керування (ПАК) – пристрій, який забезпечує виконання алгоритму керування автоматично, без участі людини. · Uвх(t) – задаюча (вхідна) величина (задаючий сигнал) – величина, яка відповідає дії людини на САК і задає певний алгоритм функціонування об’єкта, тобто задає потрібний режим його роботи. · Uрег(t) – керуюча (регулююча) величина (сигнал регулювання) – дія пристрою автоматичного керування на об’єкт з метою підтримання його алгоритму функціонування. · Uвих(t) – вихідна величина (вихідний сигнал) – результат роботи системи, параметри роботи системи, які описуються в алгоритмі функціонування. · f(t) –збурююча дія (сигнал збурення) – зовнішня дія на об’єкт, яка призводить до зміни вихідних величин більших ніж допускається алгоритмом функціонування. Вихідна величина системи Uвих(t) – це результат роботи систем. Це та фізична величина (сукупність величин), яка визначається в алгоритмі функціонування, на дотримання якої в заданих межах направлене керування. Вихідний сигнал - це інформація про значення вихідної величини. Керуюча дія – це дія пристрою керування Uрег(t), це певна фізична, електрична, механічна чи інша реакція пристрою керування, яка передається до об’єкта керування і змінює режим його роботи, приводить функціонування об’єкта у відповідність з алгоритмом функціонування. Сигнал регулювання - це значення величини керуючої дії. Збурення, чи збурююча дія f(t) – це всі можливі впливи, які порушують режим роботи системи, ведуть до порушення алгоритму функціонування у границях більших допустимих. Через дію збурення система змінює режим роботи і через нього виникає потреба здійснювати автоматичне регулювання. Сигнал збурення - це інформація про значення збурюючої дії. Теорія автоматичного керування вивчає процеси керування на найбільш загальному, абстрактному рівні. Вона вивчає загальні закони керування незалежно від природи конкретної системи. Тому у ній абстрагуються від конкретної фізичної природи системи і діючих в ній величин і розглядають тільки їх значення. Під час абстрагування поняття фізичної величини заміняють поняттям сигнал, розуміючи під сигналом інформацію про значення конкретної величини. Під поняттям величина (вхідна, вихідна, збурююча величина і т.п.) розуміють конкретну фізичну величину, яка діє на систему з врахуванням її фізичної природи. Наприклад температура, напруга, швидкість обертання, світловий потік, і т.п. Поняття величина використовують у випадках коли пояснюють роботу конкретної реально існуючої системи керування. Поняттям сигнал використовують під час теоретичного вивчення закономірностей роботи систем керування, вивчення принципів керування, законів керування. В даному випадку не має значення фізична сутність величини, а відіграє роль тільки її значення. Під поняттям сигнал (вхідний сигнал, задаючий сигнал, збурюючий сигнал, вихідний сигнал і т.п.) розуміють інформацію про значення величини (вхідної, задаючої., збурюючої), без урахування її конкретної фізичної природи. У випадку, коли йде мова про конкретну систему, коли результати теорії потрібно використати для опису роботи певної технічної системи, тоді поняття сигнал міняють конкретною фізичною величиною, як наприклад напругою, силою, положенням ручки регулятора тощо. Слід зауважити, що існує два поняття - керування і регулювання. Відповідно до цього розрізняють теорію керування та теорію регулювання. Керування – це більш загальне поняття охоплює значно ширше коло задач. Теорія автоматичного регулювання займається питаннями регулювання режимів роботи систем. Закони ТАК - це, переважно, закони регулювання. Тому раніше розділяли наукові дисципліни і виділяли теорію автоматичного регулювання як окрему наукову дисципліну. Термін „теорія регулювання” дещо точніший, більш точно визначає предмет вивчення. Але керування - більш загальне поняття в останній час цей термін є більш вживаним і ним ми будемо тут користуватися.
Приклади САК
З прикладами систем автоматичного керування ми зустрічаємось на кожному кроці і в побуті, і на виробництві, і в живій природі. Практично ніяка більш-менш складна технічна система не може обійтися без систем автоматичного керування. Приклади таких систем показано на рис 1.2 – 1.21 Розглянемо деякі з них. Візьмемо побутову техніку. Холодильник, електричний утюг, радіоприймач, магнітофон, телевізор. Вся ця та інша техніка має у своєму складі або сама повністю є системою автоматичного керування. Більш серйозна техніка – регулятор швидкості паровоза, генератор електростанції із системою регулювання частоти струму та напруги, зенітна ракета, місяцехід, система орієнтації супутника, атомний реактор та багато інших також є системи автоматичного керування. Системи живої природи – система забезпечення постійного хімічного складу лімфи, регулювання кровообігу, система регулювання розміру зіниці ока та ін. – це також системами автоматичного керування. Розглянемо приклади систем керування відповідно до наведеної загальної схеми. Електричний утюг. Алгоритм функціонування САК утюга – це підтримання постійної високої температури поверхні. Утюг має пристрій керування, який забезпечує постійний нагрів. Об’єкт керування – нагрівач разом з корпусом. Вхідна величина – положення ручки регулятора, вихідна – температура поверхні, збурюючі величини – тканина, яка охолоджує утюг, зовнішнє середовище. Радіоприймач. Кожен радіоприймач має систему автоматичного регулювання підсиленням (АРУ). Радіохвилі, які приходять до антени, через ефірні перешкоди змінюються за величиною. Якщо в приймачі після детектування підсилити ці хвилі, то рівень звуку з часом буде змінюватись. Слухати такий приймач не досить приємно. Система АРУ забезпечує постійний рівень звуку в динаміку. Отже алгоритм функціонування АРУ є підтримання постійного рівня звуку в динаміку. Розгляньте самостійно які величини тут є задаючою, вихідною та збурюючою. Магнітофон – містить система автоматичного підтримання постійної швидкості переміщення магнітної стрічки. Алгоритм функціонування САК механікою магнітофона є підтримання постійної швидкості обертання тонвала. Телевізор – містить ряд систем автоматичного регулювання як от система підтримання постійної яскравості екрану, постійної сили звуку, система автоматичної настройки на частоту радіостанції та ін. Холодильник (див. рис. 1.2) забезпечує постійну температуру продуктів. Алгоритмом його функціонування є підтриманні постійної низької температури в корпусі. В ньому є блок керування та холодильний агрегат (термостат), який забезпечується постійну температура в корпусі холодильника. Задаючою (вхідною) величиною є температура, встановлена положенням ручки регулятора, а вихідною величиною – температура продуктів у холодильнику. Під час роботи холодильника двигун прокачує теплоносій. Розширяючись в камері термостата теплоносій охолоджує її. Регулювання температури здійснюється за допомогою сифона, який перекриває клапан і не дає щоб теплоносій розширювався в камері термостата. Керуюча дія це перекривання клапана камери термостата. Збуруюча дія – це вплив навколишнього середовища, відкривання дверей і закладання теплих продуктів тощо. Алгоритмом функціонування ядерного реактора є підтримання постійного потоку нейтронів Система автоматичного регулювання потоку нейтронів у ядерному реакторі (див. рис. 1.3) керує ходом термоядерної реакції. В разі збільшення потоку нейтронів у реактор опускаються стержні сповільнювача реакції, які поглинають надлишкові нейтрони, чим хід реакції сповільнюється. Автоматичне регулювання випуску продукції на підприємстві (див. рис. 1.4) здійснюється завдяки поверненню в цикл виробництва фінансових ресурсів від реалізації продукції. Алгоритмом функціонування підприємства є отримання прибутку на певному рівні. Регулювання напруги генератора (див рис.1.5).здійснюється за рахунок того, що значення вихідної напруги подається, через пристрій регулювання, на обмотку збудження генератора. Зенітна ракета – автоматично стежить за переміщенням цілі й рухається в її напрямку. Алгоритмом САК ракети є підтримання її руху в напрямку цілі. Вхідна величина – напрямок на ціль, який визначається радіолокатором, звуковим чи інфрачервоним датчиком. Вихідна величина – напрямок фактичного руху ракети за азимутом та кутом до горизонту. Збурюючі дії – атмосферні потоки, маневри цілі та ін. Система автопілот, яка керує курсом літака та система підтримання курсу торпеди (див. рис. 1.9; 1.10) мають майже однакове призначення, проте реалізовані вони по різному. Основою таких систем є гіроскоп, який задає вибраний напрямок для орієнтації в просторі. Генератор електростанції. Завдання системи автоматичного керування генератора – забезпечити постійну частоту струму та постійну величину напруги. У живій природі досить багато процесів також здійснюються автоматично (див. рис.1.17, 1,18). Однією з таких систем є система автоматичного регулювання розмірів зіниці ока, яка забезпечує саме сприятливе освітлення сітківки і дає можливість бачити предмети під час різкої зміни їх яскравості. Керуючим пристроєм у даному випадку є мозок, який, поза нашою свідомістю, подає сигнали на мускули і заставляє звужувати чи розширювати сітківку ока. Приклади регуляторів цих та ряду інших систем показано на рис. 1.2 – 1.19.
Рис. 1.2– Регулятор температури в холодильнику.
Рис. 1.3 – Система автоматичного регулювання потоку нейтронів у ядерному реакторі.
Рис. 1.4 – Система регулювання виробництва продукції на фабриці.
а)
б) Рис. 1.5 – Регулятори напруги генератора а) з використанням лампового каскаду, б) з використанням операційного підсилювача.
Рис. 1.6 – Система регулювання швидкості обертання парової машини, регулятор Уатта (К1, К2 – масивні кулі, М – муфта, РО – регулюючий орган, Q – подача пари, О – паровий двигун).
Рис. 1.7 – Система регулювання швидкості обертання непрямої дії (К1, К2 – масивні кулі, М – муфта, РО – регулюючий орган, Q – подача пари, О – паровий двигун, З – золотник, ГП – гідропідсилювач, Qм – потік масла, П – поршень
Рис. 1.8 – Слідкуюча система регулювання кута повертання з механічним зворотним зв’язком
Рис. 1.9 – Система «автопілот»
Рис. 1.10 – Регулятор курсу торпеди
Рис. 1.11 – Регулятор обертів непрямої дії (Дв – двигун, Тг – тахогенератор, + – Uo – задатчик, ЕМУ – електромагнітний підсилювач.
Рис. 1.12 – Комбінована система регулювання обертів (Та ж, що на попередній схемі з додатковою вимірювальною муфтою, що вимірює навантаження на валу)
Рис. 1.13 – Системи регулювання температури середовища шляхом подавання холодного повітря Q КШ – поляризоване реле.
Рис. 1.15 – Пристрій подачі імпульсної напруги
Рис. 1.16 - Система автоматичної орієнтації супутника
Рис. 1.17 – Регулювання освітленості сітківки ока (розмірів зіниці)
Рис. 18 – Регулювання хімічного складу в тканинах організму
Рис. 1.19 – Регулятор Уатта
Розглянемо більш детально конструкцію деяких регуляторів. На рис. 1.6; 1.7; 11.19 представлено відцентровий регулятор, призначений для підтримання постійної швидкості обертання вала парової машини, винайдений англійським механіком Джеймсом Уаттом в 1784 р. Вперше він був установлений на паровозі. Принцип дії його такий: регулятор має дві масивні кулі, підвішені шарнірно на осі. Вісь разом з кулями приєднана до валу парової машини. Під час обертання кулі розходяться. Сили, які зумовлюють положення стержнів регулятора, це: відцентрова сила реакції куль – Fц, і сила ваги куль – Р. При збільшенні швидкості обертання стержні відхиляються на більший кут, оскільки відцентрова сила збільшується. Реакція стержня та вага куль у сумі забезпечують доцентрову силу, потрібну для обертання куль. Муфта – М при цьому піднімається і переміщує важіль – В. Перекривається канал доступу пари і оберти машини зменшуються.
Рис. 1.20 – Статичний регулятор рівня води
Рис. 1.21 – Астатичний регулятор рівня води (регулятор непрямої дії).
Регулятор рівня води схематично показаний на рис. 1.20. Тут об’єктом керування є бак, в якому підтримується потрібний рівень води. Регулятором служить поплавок, з’єднаний за допомогою важеля з голчастим клапаном. При зниженні рівня води клапан переміщується і відкриває потік води. При постійному потоці води, що витікає, клапан знаходиться у певному відкритому положенні, вода поступає в бак і рівень води вирівнюється. На рисунку показано графік регулювання, в якому видно залежність рівня води від швидкості витікання води з бака Q. Рівень залежить від швидкості витікання води. На рис.1.21 показано аналогічний регулятор рівня. Тут, на відміну від попереднього регулятора, регулюючий орган (клапан) переміщується двигуном Д. На двигун подається напруга, яка залежить від положення поплавка. Цей регулятор забезпечує постійний рівень води не залежно від швидкості її витікання. Порівняння цих регуляторів показує, що в першому випадку ми маємо регулятор прямої дії, а в другому – регулятор непрямої дії. Але для нас важливішою є робота цих регуляторів. Якщо графік регулювання першого регулятора в динамічному режимі (тобто при відкритому вихідному крані) має вигляд нахиленої лінії, то другий регулятор має графіком регулювання горизонтальну лінію. Це зумовлюється принципом роботи регулятора. У подальшому, коли будемо вивчати питання точності регулювання більш детально розглянемо процеси регулювання. Відмітимо тут тільки, що перший регулятор називають статичним, а другий астатичним.
Контрольні запитання перевірки засвоєння навчального матеріалу
1. Вивченням яких питань займається кібернетика? 2. Які системи відносять до систем автоматичного керування? 3. Яка роль керування в сучасному світі? 4. Які перші регулятори, створені людиною, ви знаєте? 5. Що таке алгоритм? 6. Наведіть приклади алгоритмів. 7. Що таке алгоритм функціонування? 8. Чи можна здійснити регулювання роботи сучасних технічних пристроїв без автоматичного керування? Наведіть приклади. 9. У чому різниця між регуляторами прямої і непрямої дії? 10. Яку величину називають збурюючої, в чому особливість її дії? 11. Розгляньте різноманітні схеми систем керування, подумайте, у яких випадках можна обійтись без автоматичного керування? 12. Чим відрізняються регулятори прямої і непрямої дії, показані на рис. 1.6 і 1.7? 13. Чи існують системи автоматичного регулювання в живій природі? Наведіть приклади. 14. Чи існують системи регулювання в суспільстві? Наведіть приклади 15. Поясніть, як працює зіниця ока. 16. Який регулятор з наведених на рисунках ви вважаєте найбільш складним? 17. За допомогою якого пристрою можна змінювати значення температури в холодильнику, показаному на рис. 1.2? 18. Поясніть. як працює регулятор Ватта, показаний на рис. 1.19? 19. Розгляньте побутові пристрої, які знаходяться у вас в квартирі. Які з них ви можете віднести до систем, що мають автоматичне керування чи регулювання? 20. Чи є с домашньому телевізорі системи автоматичного керування? Що вони виконують? 21. Чи є в автомобілі системи автоматичного керування? Які це системи? 22. Назвіть хоча б короткий перелік пристроїв, які можуть входити в склад систем автоматичного керування? 23. Яку роль відіграє автоматичне керування в сучасній техніці, в суспільстві. в живих організмах. 24. Наведіть приклади систем автоматичного керування у живій природі.   ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|








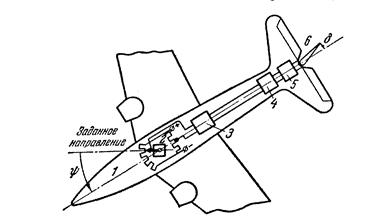



 Рис. 1.14 – Системи регулювання положенням керованого об’єкта.
Рис. 1.14 – Системи регулювання положенням керованого об’єкта.





