|
|
Розділ 5. Структурна схема САК
Визначення структурної схеми САК
Структурна схема САК – це умовне графічне зображення системи автоматичного керування, яке служить для її математичного опису. На структурній схемі САК зображають у вигляді з’єднаних між собою динамічних ланок. Динамічна ланка – це умовно виділена частина системи автоматичного керування, яка виконує найпростіші перетворення сигналів. Динамічна ланки відповідають певним перетворенням сигналів у системі. Ці перетворення описують як правило засобами математики, а саме передатною функцією динамічної ланки. Зображають динамічні ланки прямокутником, всередині якого записують передатну функцію. В якості динамічних ланок виступають умовно виділені частини системи, в яких здійснюються найбільш прості перетворення сигналів. Динамічні ланки з’єднують між собою стрілками, які відповідають напрямку передачі сигналу від однієї ланки до іншої. Динамічні ланки є ланками направленої дії. Ланкою направленої дії - це ланка, яка передає сигнал тільки в одному напрямку з входу на вихід і її властивості не залежать від інших ланок, з якими вона з’єднана. Ланка направленої дії це певна ідеалізація. Фактично немає таких ланок, щоб на них не впливали інші ланки. Наприклад, у розглянутій нами САК обертами двигуна постійного струму двигун впливає на роботу генератора і напруга на виході генератора Ug, приєднаного до двигуна Uд, дещо відрізняється від напруги холостого ходу генератора Ug. Але ми цим впливом нехтували і вважали Ug ≈ Uд. У випадках, коли впливом іншої ланки не можна нехтувати, реальну ланку можна подати у вигляді двох ланок направленої дії, з’єднаних зустрічно–паралельно, як це показано на рис.5.1.
Рис. 5.1 – Заміна однієї реальної ланки двома ланками направленої дії
Умовні позначення, прийняті для структурних схем, показані на рис 5.2. Це: · динамічна ланка – прямокутник, в середині якого записана Передатна функція; · сигнал, що передається від однієї ланки до іншої – стрілка з вказівкою напрямку передачі сигналу; · розгалуження сигналів – стрілка, що відгалужується від іншої стрілки; · злиття сигналів – суматор у вигляді кружка, поділеного на сектори, причому не зафарбованому сектору відповідає сигнал зі знаком “+”, а зафарбованому – зі знаком “-”.
Рис. 5.2 – Умовні позначення для на структурних схем а – динамічна ланка; б – сигнал, що передається від однієї ланки до іншої; в –розгалуження сигналів; г – злиття сигналів (суматор) Структурна схема САК обертами двигуна
Побудуємо структурну схему САК швидкістю обертання двигуна. Ця схема показана на рис. 5.3.
Рис. 5.3 – Структурна схема САК швидкістю обертання двигуна постійного струму з незалежним збудженням
У структурну схему САК входять такі блоки: - блок суматора, на який подають сигнали задаючої дії Uз і зворотного зв’язку Uзз від тахогенератора. Нижній сектор суматора зафарбований, що свідчить про те, що сигнал зворотного зв’язку віднімається від задаючого сигналу (деколи говорять, що сигнал подається проти фазі); - блок напівпровідникового підсилювача, його Передатна функція Kпп; - блок генератора, його Передатна функція - блок двигуна з передаточною функцією - блок тахогенератора з передатною функцією Ктг; - додатково у схемі показано ще один суматор і блок, через який проходить сигнал збудження. Цей блок зумовлює проходження сигналу збурення. У розглянутій системі збуренням є навантаження на валу двигуна. Воно прикладається до валу двигуна. Типи динамічних ланок
У системах автоматичного керування використовують цілий ряд типів динамічних ланок. Тип динамічної ланки визначається процесами перетворення інформації, які ці ланки забезпечують. Ці процеси перетворення сигналів описують певними диференційними рівняння. Різних типів динамічних ланок можна нарахувати кілька десятків. Проте найбільш важливими і вживаними є шість ланок, а саме: · підсилювальна динамічна ланка, · аперіодична (інерційна), · коливальна (аперіодична ланка ІІ порядку), · диференційна, · реальна диференційна, · інтегруюча. (Декому важко сприймати, що потрібно користуватись такою складною річчю, як диференційні рівняння. Проте більш простого і точного опису процесів просто не існує. Звичайно, для найпростіших перетворень сигналів можна використати словесний опис. Наприклад, підсилююча ланки підсилює сигнал чи перетворює його. Диференційна ланка видає сигнал пропорційний швидкості зміни вхідного сигналу. Інтегруюча ланка – видає сигнал, який дорівнює сумарній величині вхідного сигналу за певний проміжок часу. Але навіть у цих найпростіших випадках словесна форма опису є незручною. Описати словами дію інших ланок просто неможливо, настільки вона складна, а математична формула її описує у всіх деталях, правда, мовою, зрозумілою для спеціаліста. Спеціалісти повинні розуміти мову математики, і вільно володіти нею.) Розглянемо основні типи динамічних ланок. Підсилювальна ланка – це найпростіша динамічна ланка. Вона підсилює сигнал, або перетворює його з однієї фізичної величини в іншу. Рівняння такої ланки можна записати так:
Передатна функція ланки W(p) = K. (5.2) Тут К – коефіцієнт підсилення, або коефіцієнт передачі. Такими ланками у розглянутій нами САК швидкістю двигуна є напівпровідниковий підсилювач і тахогенератор. Вихідний сигнал підсилювача в точності дорівнює вхідному сигналу, помноженому на коефіцієнт підсилення, якщо, звичайно, підсилювач якісний. Аналогічно і для тахогенератора: вихідний сигнал відповідає швидкості обертання валу, тобто величині ω помноженій на коефіцієнт передачі. Назва коефіцієнт підсилення чи коефіцієнт передачі відображає тільки фізичну суть процесу. Як правило, в ТАК розглядають тільки системи з інформаційної точки зору, тому абстрагуються від фізичної суті явищ і, як правило, називають величину К – коефіцієнтом підсилення. Залежно від значення величини К ланка може підсилювати або ослабляти сигнал. Якщо К>0, то ланка підсилює сигнал, якщо K<0, то вона зменшує значення сигналу, але і в цьому разі ланку називають підсилювальною. Прикладами підсилювальних ланок можуть бути: зубчаста чи фрикційна передача, важіль, гідравлічний прес, подільник напруги, операційний підсилювач та багато інших механічних, гідравлічних чи електричних пристроїв.
Рис.5.4 – Приклади підсилювальних ланок. а) подільник напруги, б) операційний підсилювач, в) зубчата передача, г) важіль
Аперіодична ланка (інерційна ланка, аперіодична ланка першого порядку). Ланка, яка описується диференційним рівняння
Передатна функція ланки
Тут К – коефіцієнт підсилення, T – постійна часу. Такою ланкою в розглянутій нами САК обертами двигуна є генератор. Ланка відповідає інерційному елементу, якому властиве певне запізнення. Прикладами таких ланок є: маховики, які розміщені на осі і розкручуються зовнішніми силами. Двигун, без урахування індуктивності якоря, коли враховують тільки його активний опір, резервуар пневмосистеми, в який нагнітають повітря, RC та LR - ланцюжки в електричному колі та багато інших систем. Ряд прикладів аперіодичних ланок показано на рис.5.5.
Рис. 5.5 – Приклади аперіодичних ланок І –го порядку (інерційних ланок) а) RC – ланцюжок, б) LR - ланцюжок, в) двигун без врахування індуктивного опору якоря, г) резервуар компресора.
Коливальна ланка Динаміка ланки описується рівнянням
Передатна функція
де К – коефіцієнт підсилення; T – постійна часу; D – постійна затухання коливань. Це ланки, в яких виникають коливальні процеси. Прикладом можуть бути різні механічні системи, наприклад, маятник, вантаж на пружній підвісці і т.п. Електричною коливальною ланкою є LC ланцюжок. Приклади коливальних ланок наведені на рис. 5.6.
Рис.5.6 – Приклади коливальних ланок a) вантаж на пружній підвісці, б) маятник, в) LC ланцюжок, г) коливальний контур д) електричний двигун.
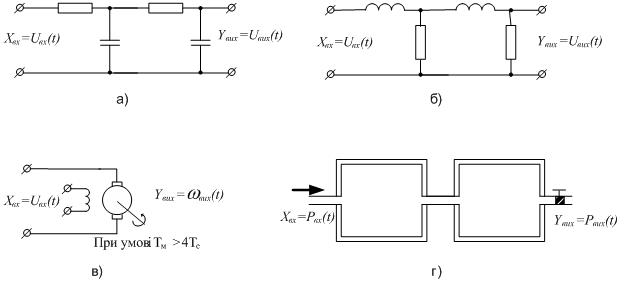
Аперіодична ланка ІІ порядку Це та ж коливальна ланки, яка розглянуто раніше, але при умові, що затухання в ній велике і коливання не виникають. Коливальна ланка, яка відповідає рівнянню (5.5), стає аперіодичною ланкою II порядку, якщо постійна затухання більша 1. Тобто при умові D > 1 коливальна ланка перетворюється в аперіодичну ланку другого порядку. І навпаки при D < 1 аперіодична ланка ІІ порядку стає коливальною. Досить часто не підкреслюють, чи ланка є коливальною, чи аперіодичною ланкою другого порядку, а говорять тільки про коливальні ланки, оскільки вони описуються одним і тим же рівнянням і можуть бути однаковими за конструкцією, відрізняючись тільки своїми характеристиками. Важливо відмітити, що характеристичне рівняння коливальної ланки має два комплексно спряжені корені, а аперіодичної ланка другого порядку – два дійсні корені. Аперіодична ланка другого порядку може бути представлена як послідовне з’єднання двох аперіодичних ланок першого порядку, що не можна зробити для чисто коливальної ланки. Приклади аперіодичних ланок другого порядку наведено на рис. 5.7.
Рис. 5.7 – Приклади аперіодичних ланок другого порядку а – подвійний RC ланцюжок; b – подвійний LR ланцюжок; c – електричний двигун; d – два резервуари стиснутого повітря. Диференційна ланка. Ланка, вихідна величина якої дорівнює швидкості зміни вхідної величини. Вона описується диференційним рівняння:
Передатна функція диференційної ланки:
Реалізувати ідеальну диференційну ланку практично неможливо, оскільки будь-яка реальна система має кінцевий проміжок дії. Тому використовують реальні диференційні ланки. Реальна диференційна ланка описується рівнянням
Передатна функція ланки
Тут К – коефіцієнт підсилення, T – постійна часу. Прикладами диференційних ланок є диференціал автомобіля, заслінка в потоці рідини чи газу, кут відхилення якої пропорційний швидкості руху, СR та RL ланцюжки, трансформатор напруги. Приклади диференційних ланок наведені на рис.5.8.
Рис.5.8 – Реальні диференційні ланки а) CR ланцюжок, б) RL ланцюжок, в) трансформатор, г) заслінка в потоці рідини чи газу, д) диференційний підсилювач Інтегруюча ланка. Рівняння динаміки інтегруючої ланки
Передатна функція
Тут К – коефіцієнт підсилення, З формули (5.11) видно, що вихідний сигнал пропорційний інтегралу від вхідного сигналу. Справді, з (5.11), якщо виконати почленне інтегрування, отримаємо
Прикладами інтегруючих ланок є бак, в який наливається вода, конденсатор, що заряджається через резистор, черв’ячна механічна передача та ін. Приклади інтегруючих ланок наведено на рис. 5.9.
Рис. 5.9 – Приклади інтегруючих ланок a) – конденсатор, який заряджається струмом; b) – резервуар з рідиною; c) – черв’ячна передача
Отже ми познайомились з основними типами динамічних ланок САК. Їх не так вже й багато. П’ять основних типів ланок, які ми щойно розглянули, визначають майже 90% обладнання систем керування. Фізичні принципи, на яких реалізовані динамічні ланки, є самими різноманітними. Це і чисто електричні пристрої, і механічні, і пневматичні. У системах керування можна використовувати ланки, реалізовані на будь-яких фізичних принципах і це не залежить від призначення системи. Звичайно, найбільш часто використовують динамічні ланки, в яких основні перетворення здійснюються завдяки електричним процесам. Це пояснюється тим, що електричні явища мають найрізноманітніші прояви і реалізувати будь-які динамічні ланки засобами електротехніки найпростіше. Але з таким самим успіхом, використовуються і чисто механічні елементи систем керування, гідравлічні й пневматичні. Керування - це інформаційний процес і важливим в ньому є тільки дотримання потрібного закону перетворення величин (сигналів). Які фізичні процеси лежать в основі процесів перетворення, чим забезпечується той чи інший закон перетворення сигналу – не відіграє суттєвої ролі. Одні і ті ж функції керування може виконувати як механічна система, так і електрична чи пневматична, або навіть комбінована, тобто система, яка має механічні, електричні гідравлічні та інші складові. Наприклад, візьміть автомобіль чи тролейбус. Він має цілий ряд систем керування, але це і механічні системами, і електричні, гідравлічні і пневматичні, в яких здійснюється керування за одними і тими ж принципами, але різними пристроями..
Контрольні запитання для перевірки засвоєння навчального матеріалу 1. Яка елементарна ланка відповідає генератору у схемі керування обертами двигуна? Яка двигуну?, Тахогенератору? 2. Які параметри визначають аперіодичну ланку, коливальну ланку? 3. Наведіть приклади пристроїв, які можна подати як інтегруючу ланку. 4. Наведіть приклади пристроїв, які можна використати як диференційну ланку. 5. Наведіть приклади аперіодичної ланки. 6. Наведіть приклади пристроїв, які можна подати як коливальну ланку. 7. Наведіть приклади підсилюючої ланки. 8. Чому дорівнює вихідний сигнал інтегруючої ланки? Диференційної ланки? 9. Запишіть передатні функції вивчених типів динамічних ланок. 10. Якою динамічною ланкою можна представити електричний двигун у системі керування? 11. Яка механічна система відповідає коливальній ланці? 12. Поясніть, в яких випадках одну і ту ж сукупність елементів можна розглядати як ланки різного типу? 13. Чому механічні, електричні, гідравлічні та інші пристрої в ТАК подають як однотипні ланки?
  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|


 ;
;
 . (5.1)
. (5.1)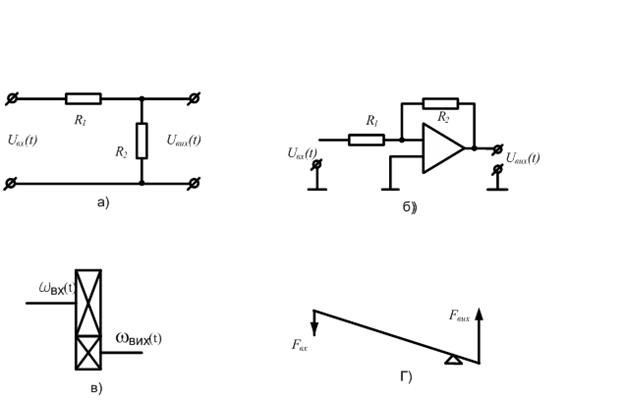
 . (5.3)
. (5.3) . (5.4)
. (5.4)
 (5.5)
(5.5) , (5.6)
, (5.6)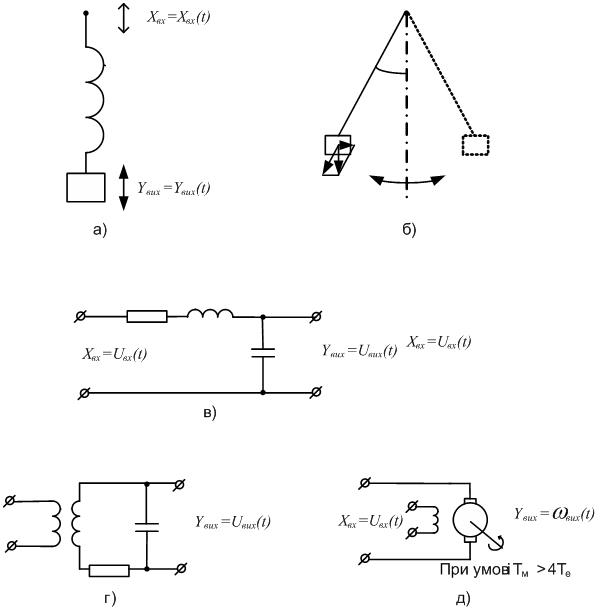
 . (5.7)
. (5.7) (5.8)
(5.8)
 . (5.9)
. (5.9) . (5.10)
. (5.10)
 . (5.11)
. (5.11) . (5.12)
. (5.12) . (5.13)
. (5.13)