
|
|
Отклонения от равновесия – термодинамический подходСтр 1 из 11Следующая ⇒ Аннотация Рассмотрены основные закономерности поведения открытых физико-химических систем при значительных отклонениях от равновесия. Большое внимание уделено вопросам неравновесной термодинамики, образованию диссипативных структур. Даны примеры возникновения упорядоченных состояний в металлургических системах. Приведены основы математического описания процессов в неравновесных системах и анализа устойчивости конечных состояний нелинейных систем. Курс лекций предназначен для подготовки бакалавров по направлению «Физика» а также на стадии подготовки магистров по направлению «Металлургия». ОГЛАВЛЕНИЕ
Введение Основные понятия и определения Равновесная термодинамика Отклонения от равновесия – термодинамический подход Термодинамические основы описания неравновесных систем 4.1. Принцип локального равновесия. 4.2. Линейная термодинамика – 1-й закон Онзагера. 4.3. Линейная термодинамика – определение термодинамических сил, 2-й и 3-й законы Онзагера. 4.4. Линейная термодинамика – диффузионные задачи. 4.5. Линейная термодинамика – принцип Пригожина. Область нелинейных законов – Универсальный критерий эволюции Самоорганизация и диссипативные структуры 6.1. Увеличение степени порядка в неравновесных системах. 6.2. Самоорганизация – эффект Бенара. 6.3. Самоорганизация – эффект Тейлора. 6.4. Самоорганизация – реакция Белоусова – Жаботинского. 6.5. Диссипативные структуры – свойства, классификация, условия существования. Нелинейная термодинамика – динамические модели процессов с одной переменной 7.1. Динамические уравнения. 7.2. Эволюция систем – метод потенциала. 7.3. Автокатализ, динамика популяций. 7.4. Автокатализ с ветвлением, бифуркации – неравновесные фазовые переходы. 7.5. Ангармонический осциллятор – нарушение временной симметрии. 7.6. Эволюция систем – анализ динамической функции. Нелинейная термодинамика – динамические модели процессов с двумя переменными 8.1. Точечные конечные состояния, классификация, фазовые портреты эволюции систем. 8.2. Предельные циклы. 9. Общие вопросы устойчивости нелинейных систем 9.1. Устойчивость по траектории. 9.2. Орбитальная устойчивость. 9.3. Структурная устойчивость. Теория катастроф – взгляд со стороны 10.1. Катастрофы и анализ структурной устойчивости динамических моделей. 10.2. Катастрофа «складка». 10.3. Катастрофа «сборка». Активные среды 11.1. Бистабильные среды. 11.2. Возбудимые среды. Библиографический список Приложение
Введение Любая наука изучает систему, то есть некоторый объект или совокупность объектов. При этом исследуется, как устроен объект – его свойства, структура, особенности. Одним из наиболее важных является вопрос эволюции системы – вопрос поведения её во времени. Например, в механике предполагается возможность полного описания любого объекта в любой наперёд заданный момент времени, то есть для законов механики характерны строгая причинность, единственность поведения, полная симметрия прошлого и будущего, то есть обратимость основных законов движения относительно времени. Естественно, что и процессы, описываемые такими законами, обратимы. Однако сравнение полученной картины с реальным миром явлений показывает, что законы механики не описывают сложные многочастичные системы. Описанием сложных систем занимается термодинамика: в термодинамике постулируется, что любая система со временем необратимо приближается к своему наиболее вероятному состоянию – состоянию равновесия, характеризуемому максимально возможной для этого объекта степенью беспорядка - энтропией. Природа нестатична - она эволюционирует, развиваясь из прошлого в будущее, при этом будущее согласуется с термодинамикой: развитие идёт от порядка – к беспорядку, от здоровья – к болезни и смерти, то есть к разрушению, и никогда назад, к порядку и здоровью - обратные процессы здесь запрещены. Но в природе постоянно происходят обратные процессы, причём всегда (!) – в системах, далёких от равновесия. Самым распространённым и наглядным примером является феномен жизни: живые организмы со времени своего появления претерпели значительное усложнение формы и степени организации, чему мы являемся безусловными свидетелями. Примеры усложнения структуры можно повсеместно найти и в неживой природе: это периодические явления в геологических масштабах – от гейзеров до закономерного повторения ледниковых периодов. Сложные неравновесные структуры с высокой степенью порядка часто образуются и в технике, в частности, в металлургии и в металловедении: это дендритная и зональная структуры слитков и отливок, бейнитная, троститная, сорбитная и др. структуры в сталях. Повторяющиеся циклические (упорядоченные) процессы происходят также в жизни человеческого общества, в экологических системах. Всё это убеждает нас, что в сложных системах при определённых условиях возможны процессы с увеличением степени порядка. Такое поведение систем, которое можно охарактеризовать как самоорганизацию, казалось бы, противоречит основным принципам как термодинамики, так и механики. Действительно ли это так? Чтобы разобраться в этом и сформулировать условия и механизмы формирования порядка, необходимо найти правильный подход к изучению таких систем. Здесь просматривается два возможных варианта: 1. Предположить, что при переходе к сложным системам определённого вида или находящихся в определённых условиях, т.е. при преодолении некоторого барьера «сложности», мы вступаем область действия новых законов, более общих, чем законы механики и термодинамики. Этот переход, возможно, аналогичен переходу к миру сверхвысоких скоростей (теория относительности) или миру сверхмалых масштабов (квантовая механика), хотя в настоящее время не обнаружено никаких специфических законов, свойственных очень сложным объектам. 2. Попытаться описать процессы увеличения степени порядка на основе уже имеющихся законов и принципов и на базе накопленного экспериментального материала. Вариант №2 оказался предпочтительным для многих исследователей, работающих в различных сферах научной деятельности. При этом использование уже известных законов потребовало объединения и обобщения информации, имеющейся в различных областях знаний - этот подход с лёгкой руки профессора Штутгартского университета Г.Хакена получил название синергетического, а сама наука названа «Синергетикой». Синергетика – наука, изучающая совместное действие многих подсистем, в результате которого на макроскопическом уровне возникает структура и соответствующее функционирование (Г. Хакен). «Синергетика» в переводе с греческого языка означает содействие, сотрудничество. Идеологической основой синергетики является нелинейная термодинамика неравновесных систем и процессов, поэтому в имеющихся на данный момент учебниках и монографиях при анализе самоорганизации основное внимание уделяется именно термодинамическому анализу процессов эволюции систем как в направлении уменьшения, так и в сторону увеличения степени порядка. Определяющую роль при этом играет теория диссипативных структур, то есть упорядоченного поведения или состояния особой формы сложных объектов, разработанная нобелевским лауреатом по химии И. Пригожиным на основе термодинамической теории устойчивости (И. Пригожиным в 40-х годах 20-го века была создана брюссельская школа по исследованию процессов вдали от равновесия). Язык определений и математический аппарат новой науки вырос по большей части из ранее разработанных теорий: теории систем (Берталанфи), кибернетики и теории информации (Винер, Эшби), теории игр и оптимального пути эволюции (фон Нейман), теории нелинейных дифференциальных уравнений (Пуанкаре) и т.д. В связи с этим, чаще вместо общего названия «синергетика» при исследовании самоорганизации в сложных системах используют названия: неравновесная термодинамика, термодинамика необратимых процессов, нелинейная динамика, термодинамическая теория устойчивости. В нашей стране изучением самоорганизации в теории автоколебаний занималась школа акад. Андронова (с 30-х годов 20-го века), правда, в то время термин «самоорганизация» ещё не был общеупотребительным и не фигурировал в названиях публикаций и др. работ. Позже была развита теория автоволн (Р.Хохлов), экспериментально обнаружены химические колебательные процессы (Белоусов) и концентрационные волны в жидкой фазе (Жаботинский). Данный курс не претендует на полноту охвата материала, его задача - дать общее введение в метод изучения сложных нелинейных систем, показать возможности качественного анализа динамических моделей и привлечь внимание студентов, специализирующихся в области металлургии, металловедения и физико-химических методов исследований металлургических процессов к возможностям, которые открывает перед специалистами единый подход к решению самых разнообразных задач. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Во введении уже были использованы некоторые понятия – такие, как система, структура и т.д. Чтобы в дальнейшем не возникало неясностей при их трактовке, необходимо определить эти и некоторые другие понятия так, как это принято в термодинамике и смежных с ней науках. При этом следует учесть, что, поскольку сами понятия носят весьма общий характер и охватывают широкий круг разнородных объектов и процессов, определения также будут достаточно общими. В дальнейшем не всегда оказывается возможным дать также точные математические формулировки и определения. С и с т е м а – это объект, состоящий из нескольких (в пределе – бесконечного числа) элементов (подсистем, частей), взаимодействующих друг с другом (в пределе взаимодействие может отсутствовать - например, идеальный газ), которые составляют единое целое и могут быть выделены из окружающей среды - это означает, что взаимодействия внутри объекта более значимы (интенсивнее, сильнее), чем его внешние взаимодействия (в пределе внешние взаимодействия отсутствуют - система замкнута). Системы разделяются на относительно простые, которые могут быть описаны законами механики, и сложные, которым обычно присуще большое количество элементов и многообразие связей между ними, включая и обратные связи. Более чёткого определения сложной системы дать не удаётся. Примеры простых систем: соударяющиеся точечные частицы, движение частицы (планеты) под действием силы тяжести, движение точечного заряда в электрическом (магнитном) поле. Примеры сложных систем: столб газа в атмосфере, содержащий несколько химических компонентов (веществ) и подверженный воздействию солнечного света и тепла, силы тяжести, магнитного поля Земли, потока космических частиц; живой организм. С т р у к т у р а – это способ организации элементов и характер связей между ними, при этом неважно, каковы сами элементы и их природа, а важна лишь сама совокупность их взаимоотношений (возможно, и их порядок). Структуры можно подразделить на пространственные (рельеф местности, структура образца), временные (последовательность сигналов, событий) и пространственно-временные (волны, вихри). Кроме того, возможны структуры двух типов сложности: статическая структурная сложность, характеризующаяся самими структурами элементов и характером их взаимосвязей, и динамическая сложность, связанная с поведением системы во времени – при этом ясно, что первая влияет на вторую. М о д е л ь – идеальный образ объекта, получаемый путём упрощения реальной сложной системы соответствующим выбором элементов и отказом от несущественных связей. Построение модели в большинстве случаев оказывается необходимым, так как исследование реальной физико-химической или другой системы, содержащей огромное количество элементов, связанных друг с другом очень сложным образом, наталкивается на непреодолимые препятствия. Поведение модели должно быть адекватно поведению реальной системы в некотором интервале значений внешних параметров (очевидно, не при всех значениях). Модель объекта (явления) представляет собой продукт схематизации реальной картины, причём степень схематизации зависит от общего замысла и целей анализа, от ожидаемой полноты и точности решения задачи. Но всегда в объекте исследования должно быть выделено основное, то есть целесообразно построенная модель должна отображать наиболее существенные черты объекта, при этом второстепенные особенности во внимание не принимаются. П а р а м е т р ы – все макроскопические признаки, характеризующие саму систему и её взаимодействия с окружающей средой. Параметры могут быть внешними (если они определяются не входящими в саму систему объектами) и внутренними (если они определяются внутренним движением и взаимодействием элементов системы). Состояние системы определяет совокупность независимых параметров (внешних и внутренних). С т а ц и о н а р н о е с о с т о я н и е – состояние, когда параметры системы не зависят от времени, т.е. не меняются со временем. Р а в н о в е с н о е с о с т о я н и е = с о с т о я н и е т е р м о д и н а м и ч е с к о г о р а в н о в е с и я - состояние, когда не только все параметры не зависят от времени, но и нет потоков (вещества, энергии и др.) через границы системы, вызванных внешними источниками,. Согласно статистической теории, состояние термодинамического равновесия – наиболее вероятное, устойчивое состояние системы при заданных значениях внешних параметров. Т е р м о д и н а м и ч е с к и е п а р а м е т р ы - параметры, которые характеризуют систему в состоянии термодинамического равновесия. И з о л и р о в а н н а я с и с т е м а – система, которая не обменивается со внешней средой ни веществом, ни энергией. Изолированная система с течением времени приходит в состояние термодинамического равновесия и никогда самопроизвольно не может из него выйти, т.к. это наиболее вероятное её состояние. В р е м я р е л а к с а ц и и – время, за которое система, выведенная из состояния равновесия, возвращается в равновесное состояние. Т е р м о д и н а м и ч е с к а я с и с т е м а – система, которая находится в состоянии термодинамического равновесия. Р а в н о в е с н ы й п р о ц е с с – процесс, при котором все параметры системы изменяются физически бесконечно медленно (квазистатически), при этом система постоянно находится в равновесных состояниях (всегда остаётся термодинамической). Бесконечно медленным (равновесным) изменением любого из параметров системы называют его изменение за время, много меньшее времени релаксации системы, при этом сам процесс релаксации является неравновесным процессом. О б р а т и м ы й п р о ц е с с = р а в н о в е с н ы й п р о ц е с с. РАВНОВЕСНАЯ ТЕРМОДИНАМИКА
Не вдаваясь в детали классического термодинамического описания, которое подробно приводится в курсе физической химии, напомним лишь несколько основных положений, касающихся законов, управляющих поведением термодинамических систем. Равновесные (обратимые) процессы, протекающие бесконечно медленно, исключают из рассмотрения время, затрачиваемое на такие процессы, то есть времени в равновесной термодинамике нет. Рассмотрение равновесных процессов необходимо, поскольку при этих процессах многие важные величины, поддающиеся расчёту (в частности, работа тепловых машин), имеют максимальные значения. При этом в качестве первого принципа (первого постулата, первого начала) вводится закон сохранения энергии, который имеет вид статического баланса энергии в отсутствие потоков и позволяет количественно определить энергетику происходящих процессов, не указывая их направления. Для описания неравновесных (необратимых) процессов вводится ключевое для всего здания современной науки понятие – энтропия. Постулируется, во-первых, что энтропия является функцией состояния S = S(p,T) и, во-вторых, энтропия - величина аддитивная, т.е. энтропия системы складывается из энтропий составляющих её элементов. Второе начало (второй принцип) термодинамики постулирует, что для изолированной (в том числе адиабатно изолированной) равновесной системы всегда реализуется только состояние с S=Smax, т.е. в этом состоянии dS=0. Если систему вывести из состояния равновесия, то критерием поведения будет стремление энтропии к максимуму S→Smax, dS→0, т.е. система стремится к равновесному состоянию, которое является конечным, устойчивым состоянием. Для описания процессов в открытых системах, происходящих в различных условиях, вводятся термодинамические потенциалы (энергия Гиббса G, энергия Гельмгольца A и др.), включающие энтропийный вклад Q= TS, причём критерием протекания необратимых процессов является стремление к минимуму соответствующего процессу термодинамического потенциала - здесь удобно провести аналогию с равновесием в механической системе, которая во внешнем поле стремится к минимуму механического потенциала (система шарик на склоне ямки в поле тяжести, который всегда скатывается на дно). Первый промежуточный итог: Механика – позволяет анализировать простые системы: - для консервативных систем – интервалы времени можно рассчитывать, но время обратимо, поэтому направление процессов определить нельзя, если не заданы начальные условия; - для диссипативных систем – существует конечное состояние, а следовательно, и направление процесса; время достижения конечного состояния (состояния механического равновесия) можно определить, если известна скорость диссипации энергии. Равновесная термодинамика – позволяет анализировать сложные системы: - для термодинамических систем - если процессы обратимы (квазистатические, то есть бесконечно медленные), то можно определять изменения термодинамических параметров, т.е. проводить описание заданного процесса; - если процессы необратимы – существует конечное состояние процесса (термодинамическое равновесие), и можно определять по исходным данным его параметры и направление процесса, однако время достижения конечного состояния не определяется.
Динамические уравнения Детерминистическая модель описывает необратимые процессы в том случае, если известно начальное состояние системы F0 (qi, t0), где qi - переменные, или, как его ещё называют, вектор состояния - тогда однозначно рассчитывается состояние Ft (qi, t) в любой более поздний момент времени t > t0. При этом зависимость вектора состояния от времени определяется системой обыкновенных дифференциальных уравнений:
где l - обозначает множество параметров. Вероятностные, или стохастические модели используют для описания нелинейных систем, когда нельзя исключить влияние случайных причин, то есть флуктуаций, вызывающих спонтанные отклонения от данного состояния. Из-за присутствия флуктуаций нарушается однозначность описания будущих состояний системы. Мы будем рассматривать только детерминистические модели, т.е. модели, описывающие процессы с известным начальным состоянием. Подробное освещение стохастических моделей неравновесных процессов см. в книге Г. Хакена. Предельные циклы Проиллюстрируем особенности двумерных моделей неравновесных систем по сравнению с одномерными на примере движения частицы (шарика) по дну круглого желоба с постоянной угловой скоростью ω. Для этого запишем уравнения движения в полярных координатах q1 = r cosφ; q2 = r sinφ, (8.13) где r – радиус-вектор частицы, φ – полярный угол. Они будут иметь следующую форму:
φ = ω. (8.14)
Первое уравнение системы (8.14) фактически задаётся формой желоба, а второе отражает факт постоянства угловой скорости. Если функция F(r) градиентная, т.е. можно ввести потенциал F(r) = – dV/dt, причём кривая V(r) при вращении вокруг оси (рис.8.7) образует поверхность, называемую потенциальной – «рельеф местности», в которой происходит движение частицы. Так как жёлоб имеет круговую форму, то и потенциальная кривая должна быть симметричной относительно оси вращения:
Рис.8.7. Потенциальная поверхность при движении частицы по кольцевому желобу. Понятно, что какими бы ни были начальные координаты частицы r(0) и φ(0), частица обязательно будет приближаться к стационарной круговой траектории, расположенной на дне жёлоба - это происходит оттого, что жёлоб расположен между двумя склонами (наружным и внутренним). Значит, частица при движении вдоль желоба всегда будет стремиться к минимуму потенциальной энергии, то есть на фазовой плоскости q1 – q2 (рис. 8.8) траектория движения частицы при любых начальных значениях координат будет иметь спиралеобразную форму:
Рис.8.8. Фазовый портрет движения частицы вблизи кольцевого жёлоба: если начальное значение радиус-вектора частицы меньше радиуса кругового желоба r0, то траектория движения частицы будет представлять собой раскручивающуюся спираль, если же r(0) > r0 – то скручивающуюся, при этом в обоих случаях конечной будет круговая (замкнутая) траектория по дну желоба, к которой стекаются все остальные траектории на фазовой плоскости - она носит название устойчивого предельного цикла. Возможен другой вариант функции F(r) (рис.8.9), когда потенциальная кривая имеет более сложную форму, а потенциальная поверхность похожа на глубокую симметричную яму, по склону которой проходит неглубокий кольцевой желоб:
Рис.8.9. Устойчивый и неустойчивый предельные циклы. Если начальный радиус-вектор частицы больше r0, то частица скатится на дно желоба r = r1, которое в этом случае соответствует устойчивому предельному циклу (как и в предыдущем примере). Но если частица в начале движения имеет координату 0 < r(0) < r0, то она скатится на дно ямы - к состоянию устойчивого равновесия. Траектория при точном равенстве r = r0 характеризуется тем, что все соседние траектории от неё удаляются или в сторону дна ямы, или в сторону кругового желоба r = r1. Такая замкнутая траектория, от которой удаляются все соседние траектории, называется неустойчивым предельным циклом. Наряду с особыми траекториями – предельными циклами, которые присущи моделям с двумя переменными, в них присутствуют и особые, критические точки, соответствующие стационарным состояниям: так, точка с координатой r = 0 в обоих рассмотренных примерах функций F(r) является особой, но в первом случае она неустойчива (вершина потенциального холма), во втором – устойчива (дно потенциальной ямы). Поведение системы, находящейся на предельном цикле – это колебательный процесс. Если речь идёт об устойчивом предельном цикле, то амплитуда колебаний не уменьшается со временем - система испытывает самоподдерживающиеся колебания, называемые автоколебаниями. Если в начальный момент времени система находилась на неустойчивом предельном цикле, то частота и амплитуда колебаний со временем меняются. Несложно убедиться, что тип колебательного состояния (фазы) зависит от того, каким способом система попадает на предельный цикл (явление гистерезиса). Возвращаясь к рис.8.7 и рис.8.9, можно заметить, что траектории частицы, приводящие на предельный цикл от состояния r = 0, в первом и втором случаях качественно отличаются. Для частицы, находящейся в условиях, соответствующих рис.8.7, колебания возникают самопроизвольно: частица, начиная движение в неустойчивой особой точке, сама со временем попадает в жёлоб - чтобы здесь возникло колебательное движение (поскольку в самой особой точке время длится бесконечно долго), достаточно бесконечно малого возмущения (флуктуации). Такое самопроизвольное возбуждение автоколебаний носит название мягкого возбуждения (бытовой пример мягкого возбуждения – механический будильник после того, как его завели). В случае на рис.8.9 для перевода частицы из равновесного положения (r = 0) на устойчивый предельный цикл (r = r1) надо преодолеть потенциальный барьер при r = r0, т.е. преодолеть пороговое значение потенциала V(r0) - такой способ перевода системы в автоколебательную фазу называется жестким возбуждением (реализуется в часах-ходиках после подъёма гири, когда прежде надо толкнуть маятник). Реализация того или иного типа возбуждения зависит от вида потенциала V(r) или, что то же самое, от вида функции F(r). Как могут происходить неравновесные (динамические) фазовые переходы в системах, фазовые портреты которых содержат предельные циклы? Будем плавно менять вид функции F(r) так, чтобы глубина жёлоба на склоне ямы стала постепенно уменьшаться, при этом в какой-то момент точки r0 и r1 сольются в одну точку перегиба (рис.8.10), то есть произойдёт аннигиляция устойчивого и неустойчивого предельных циклов, которую можно представить бифуркационной схемой:
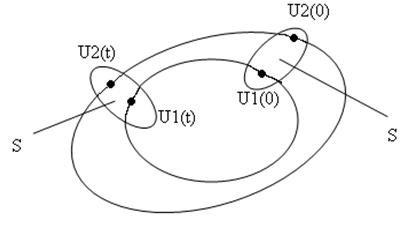
Рис.8.10. Слияние (аннигиляция) устойчивого и неустойчивого предельных циклов. Итак, можно констатировать, что в двумерных динамических моделях, кроме особых точек, характеризующихся неизменностью во времени переменной (концентрации, координаты, численности популяции) и отвечающих стационарным состояниям системы, появляются особые траектории и соответствующие им бифуркации (неравновесные фазовые переходы). ОБЩИЕ ВОПРОСЫ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ Понятие устойчивости, которое мы прежде многократно упоминали, является центральным при исследовании сложных нелинейных систем. Мы называли стационарное состояние устойчивым, если при неизменных внешних условиях система находится в нём неограниченно долго. Зададимся теперь вопросом, по отношению к чему проявляется устойчивость системы? Мы уже говорили, что в реальных условиях существуют случайные неконтролируемые возмущения – флуктуации, и если система находится в устойчивом состоянии, то флуктуации, например, начальных условий не отразятся на дальнейшем поведении системы - она всё равно останется в этом состоянии. И наоборот, флуктуации, как бы они не были малы, помешают системе задержаться в неустойчивом состоянии - на вершине горы. Здесь мы говорим об устойчивости лишь по отношению к флуктуациям. Значит, для проведения исследования на устойчивость системы, находящейся в заданном стационарном или нестационарном состоянии, необходимо математически определить понятие устойчивости. Существует несколько видов устойчивости систем. Устойчивость по траектории Рассмотрим некоторую траекторию uj (t) как движение системы в фазовом пространстве. Эта траектория устойчива, если другие траектории, которые в начальный момент времени t = t0 были рядом с траекторией uj (t), не удаляются со временем (рис. 9.1):
Рис.9.1. Поведение двух соседних траекторий движения системы в случае устойчивости по траектории. Поясним это обстоятельство. Каждая траектория – это единственный путь (поведение) системы при заданных начальных условиях. Разные начальные условия дают разные траектории в фазовом пространстве. Если мы говорим, что траектории были рядом в начальный момент времени, то это значит, что мы изучаем поведение системы при близких начальных условиях. Из того, что траектории со временем не расходятся (остаются поблизости друг от друга) следует, что значения характеризующих систему переменных qi, имеющие небольшое различие при близких начальных условиях, также незначительно отличаются друг от друга и во все последующие моменты времени - с математической точки зрения это означает, что в окрестности S заданнойтраектории uj (t) в фазовом пространстве все соседние траектории, исходящие из этой окрестности, всегда остаются в этой окрестности. Тогда говорят, что траектория uj (t) устойчива (см. рис.9.1). Если же нельзя найти такую окрестность, которую соседние траектории в любой последующий момент времени не покидали бы, то траектория uj (t) неустойчива. Можно сузить это определение. Пусть соседние траектории uj(t) и vj(t) обладают следующими свойствами:
то есть соседние траектории асимптотически стремятся друг к другу. Устойчивость, соответствующая данному определению, называется асимптотической устойчивостью по траектории. Если же
то мы имеем дело с асимптотически неустойчивой траекторией. Орбитальная устойчивость Рассмотрим теперь траекторию движения системы с точки зрения её геометрической формы. Пусть дана траектория u1 (t): если для заданного
Рис.9.2. Движение систем при орбитальной устойчивости (соседние траектории). Примеры: два самолета, вылетевшие примерно в одно и то же время, но с разными скоростями по одинаковому кольцевому маршруту, пролетают по орбитально устойчивой траектории для данной серии полетов несмотря на то, что расстояние между самолётами в процессе полёта всё время увеличивается. Или пусть имеется движение материальной точки, которое в полярных координатах выражается уравнениями:
Это движения по окружностям такие, что, чем больше радиус окружности r, тем больше угловая скорость Орбитальная устойчивость также может быть асимптотической в случае, если расстояние между движущейся по траектории точкой R, первоначально близкой к u1 (t), и самой траекторией u1 (t) стремится к нулю при t → ∞.
Структурная устойчивость Пусть даны уравнения динамической модели системы: qj = Fj, (9.4) где функции Fj часто зависят не только от переменных qj, но и от внешних параметров Катастрофа «складки» Пример 1. Рассмотрим систему с одним управляющим параметром, потенциал которой можно выразить в форме:
где a – единственный управляющий параметр. Такого типа потенциал мы уже рассматривали для случая нелинейных химических систем. Форма этого потенциала при изменении параметра a качественно меняется, что показано на рис.10.1:
Рис.10.1. Задача с одним управляющим параметром в теории катастроф - форма потенциала. Найдём параметры катастрофы, т.е. скачкообразного изменения формы потенциала, и вид сответствующего бифуркационного множества, для чего требуется определить прежде геометрическое место точек стационарного состояния на плоскости параметров q – a: dV/dq = q2 + a = 0. Полученное уравнение описывает геометрическое место особых (стационарных) бифуркационных точек (точек, соответствующих решению полученного уравнения): видно, что оно имеет решение только в отрицательной полуплоскости, а в правой (положительной) полуплоскости особых точек нет (см. рис.10.2). В точке a = 0 происходит переход от отсутствия решений сразу к двум решениям, которую поэтому называют двукратно-вырожденной. Из вида потенциала (рис.10.1) следует, что положение двукратно-вырожденной точки находят решением уравнения d2V/dq2 = 0, откуда q = 0 и a = 0. Эта особая двукратно-вырожденная бифуркационная точка и представляет собой искомое бифуркационное множество в пространстве управляющего параметра a (рис.10.2б), при этом в системе имеется катастрофа складки, в соответствии с формой стационарных состояний в простанстве одного параметра a:
Рис.10.2. Катастрофа типа «складка»: а – геометрическое место особых (стационарных) точек, б – диаграмма решений и точка бифуркации. 10.3. Катастрофа «сборки» Пример 2. Рассмотрим задачу с двумя управляющими параметрами, при этом потенциал системы может быть преведён к виду:
где a и b – управляющие параметры. Построим стационарную поверхность в пространстве параметров q – a – b, для чего решим стационарное уравнение:
Внешний вид поверхности равновесия (стационарности), определяемый этим уравнением, показан на рис. 10.3:
Рис.10.3. Катастрофа типа «сборки» в двухпараметрической задаче: а – поверхность равновесия в пространстве параметров; б – бифуркационное множество (сепаратриса) на плоскости a – b. Предположим, что в системе присутствует катастрофа - проверим это, определив вид геометрического места двукратно-вырожде   Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 = F(qi, l), (7.1)
= F(qi, l), (7.1) = F(r);
= F(r);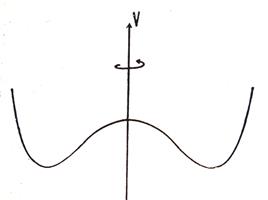


 → отсутствие предельного цикла
→ отсутствие предельного цикла
 при t → ∞, (9.1)
при t → ∞, (9.1) > 0 найдется такое η > 0, чтоточка R, движущаяся по траектории, близкой к u1 (t) (т.е. по «соседней» траектории в смысле близости начальных условий), в момент t0 находится от u1 (t) на расстоянии не более η и при t > t0 остается на расстоянии не большем
> 0 найдется такое η > 0, чтоточка R, движущаяся по траектории, близкой к u1 (t) (т.е. по «соседней» траектории в смысле близости начальных условий), в момент t0 находится от u1 (t) на расстоянии не более η и при t > t0 остается на расстоянии не большем 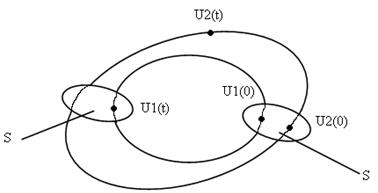
 (9.3)
(9.3) - это значит, две частицы, которые в начале движения были на соседних орбитах с близкими радиусами, со временем расходятся вследствие отличия их угловых скоростей – очевидно, устойчивости по траектории здесь нет, но форма орбиты не меняется при небольших изменениях начального значения r, а следовательно, орбитальная устойчивость здесь имеется.
- это значит, две частицы, которые в начале движения были на соседних орбитах с близкими радиусами, со временем расходятся вследствие отличия их угловых скоростей – очевидно, устойчивости по траектории здесь нет, но форма орбиты не меняется при небольших изменениях начального значения r, а следовательно, орбитальная устойчивость здесь имеется. , которые называются управляющими параметрами. При фиксированных значениях управляющих параметров поведение системы, описываемое траекториями в фазовом пространстве, однозначно зависит от начальных условий – такая картина, изображающая поле траекторий в интересующей нас области фазового пространства для всех возможных начальных условий, называется фазовым портретом системы. Если при небольших изменениях управляющих параметров структура фазового портрета остаётся без изменений, то говорят, что система обладает структурной устойчивостью («грубая» системв). Наоборот, система является структурно неустойчивой (особенной), если при небольших изменениях хотя бы одного из параметров в фазовом портрете происходят структурные (топологические) изменения. Что это значит? Основные, качественные изменения фазового портрета происходят при изменении характера особых точек или/и циклов, то есть при ветвлении решений - при бифуркациях, которые соответствуют неравновесным фазовым переходам системы. Таким образом, следует отметить, что структурная устойчивость нарушается при неравновесных фазовых переходах, когда состояние системы становится чувствительным к флуктуациям внешних (управляющих) параметров.
, которые называются управляющими параметрами. При фиксированных значениях управляющих параметров поведение системы, описываемое траекториями в фазовом пространстве, однозначно зависит от начальных условий – такая картина, изображающая поле траекторий в интересующей нас области фазового пространства для всех возможных начальных условий, называется фазовым портретом системы. Если при небольших изменениях управляющих параметров структура фазового портрета остаётся без изменений, то говорят, что система обладает структурной устойчивостью («грубая» системв). Наоборот, система является структурно неустойчивой (особенной), если при небольших изменениях хотя бы одного из параметров в фазовом портрете происходят структурные (топологические) изменения. Что это значит? Основные, качественные изменения фазового портрета происходят при изменении характера особых точек или/и циклов, то есть при ветвлении решений - при бифуркациях, которые соответствуют неравновесным фазовым переходам системы. Таким образом, следует отметить, что структурная устойчивость нарушается при неравновесных фазовых переходах, когда состояние системы становится чувствительным к флуктуациям внешних (управляющих) параметров. , (10.4)
, (10.4)

 , (10.4)
, (10.4) . (10.5)
. (10.5)