
|
|
Выполнение маневра «смена полосы движения»
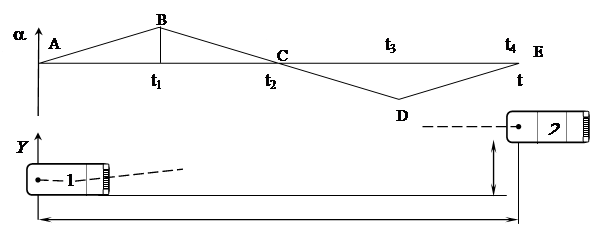
Для предотвращения ДТП в экстренном режиме выполняется обычно маневр «смена полосы движения». При этом маневре водитель поворачивает рулевое колесо в одну сторону, набирает определенное смещение ТС, а затем поворачивает рулевое колесо с переходом через нейтральное положение в другую сторону с последующим возвращением снова в нейтральное положение для продолжения прямолинейного движения, но уже по другой полосе проезжей части дороги. За время t 1 (рис. 13) осуществляется маневр «вход в поворот», а при возвращении управляемых колес в нейтральное положение (a=0, точка С) осуществляется маневр «вход-выход», после которого ТС будет продолжать движение по постоянному радиусу. Ограниченное пространство по ширине дороги обуславливает выполнение этих маневров в обратную сторону, и в точке Е автомобиль продолжает вновь движение вдоль дороги, но уже со смещением на YM от прежней полосы. Движение с неизменным положением управляемых колес
Начало маневра Конец маневра
Рис. 13. Схема маневра «смена полосы движения»: a – угол поворота управляемых колес; t 1 –время входа в поворот; t2 – время выхода из поворота до a = 0; t 1+ t 2+ t 3+ t 4 – время полного маневра
в точках В и D из-за зазоров в рулевом управлении в экстренном режиме поворотов незначительно по времени и им можно пренебречь. Тогда с учетом ранее рассмотренного неустановившегося поворота и, принимая равные значения времени t 1 , t 2 , t 3 и t 4 при равном значении w, не превышающем уровень по условиям сцепления шин в боковом направлении jУ,
w £ Lg jУ / V 2 t 1,
получаются выражения [2, 22] для координат центра задней оси Х, Y и угла поворота продольной оси ТС:
– для маневра «вход в поворот»: Х 1 = Vt 1, Y = g jУ x 2 / V 2 = V 2 w t 13 / 6 L, g = g jУ X / 2 V 2 = g jУ t 1 / 2 V = V w t 12 / 2 L;
– для маневра «вход и выход»: X 2 = 2 Vt 1, Y = g jУ X 2 / 4 V 2 = V 2 w t 13 / L, g = g jУ X / 2 V 2 = V w t 12 / L;
– для маневра «смена полосы движения»: X 4 = 4 Vt 1, Y = g jУ X 2 / 8 V 2 = 2 V 2 w t 13 / L, g = 0. Эти выражения получены при указанных допущениях без учета разности углов увода шин передней и задней осей, особенностей подвески и рулевого управления ТС, без учета неполной реализации сцепления из опасения заноса. Для приближения получаемых при этих расчетах результатов к экспериментальным данным предложены поправочные коэффициенты [2], увеличивающие расчетное значение пути маневра в зависимости от условий сцепления и скорости движения ТС:
KM = a+bV:
- для сухого асфальтобетона (j = 0,7…0,8) а = 1,12, b = 0,05; - для мокрого асфальтобетона (j = 0,35…0,4) а = 1,05, b = 0,005; - для обледенелой дороги (j = 0,1…0,2) а = 1,0, b = 0,0035. Тогда путь маневра “смена полосы движения”, выраженный через смещение полосы движения на величину Yм, определяется по выражению
где V - скорость движения ТС, км/ч. С учетом времени реакции водителя и запаздывания рулевого управления (t Р = 0,2…0,4 с) полный путь маневра «смена полосы движения» получится в виде суммы:
Для определения технической возможности предотвращения ДТП путем маневра предварительно следует найти значение необходимого поперечного смещения Yм:
Yм = B + D y, где B – ширина препятствия; D y – безопасный боковой интервал. Для определения значения Dy имеются различные рекомендации [2,6,19], но чаще в расчетах используют выражение для минимального интервала:
D y = 0,3 +0,005 V (м),
где V – скорость автомобиля, км/ч. Величину коэффициента перед значением скорости в этом выражении для автопоездов следует увеличивать почти вдвое из-за возможных боковых колебаний прицепа. Полученное расчетное значение пути маневра сравнивается с расстоянием удаления в момент обнаружения (или появления) препятствия, и если Sм < Sу, можно указать на наличие технической возможности предотвращения ДТП путем маневра. Целесообразность применения маневра можно сравнить с торможением. Торможение при прочих равных условиях является предпочтительным до некоторого значения скорости, с превышением которого путь маневра становится меньше остановочного пути (рис. 14).

Рис. 14. Общий вид зависимостей путей остановки и маневра ТС
На практике часто маневр сопровождается торможением, и если не произошло заноса, то интенсивность поворота управляемых колес и кривизна траектории ограничиваются остаточным для маневра сцеплением:
Это торможение чаще всего практикуется в зоне точки С (см. рис. 13), перед поворотом в обратную сторону. Поэтому расчет следует вести поэтапно. Траекторию движения ТС при маневрах обязательно показывать на масштабной схеме, по которой удобно разъяснять заключение экспертизы следователю и в суде. В целом же расчеты маневрирования ТС по сравнению с расчетами процесса торможения являются менее точными и определенными как из-за недостаточной для целей практики изученности сложных процессов управляемости и устойчивости ТС, так и из-за неопределенных действий водителя как оператора. Поэтому имеется настоятельная необходимость исследований управляемого движения различных транспортных средств в эксплуатационном режиме и в условиях опасных дорожных ситуаций. В настоящее время имеются разработанные конструкции измерительных комплексов с записью параметров движения ТС (аналогии с “черным ящиком” в авиации). Внедрение этого позволит получить достоверную информацию о движении ТС непосредственно перед и во время ДТП. Проведение следственного эксперимента при расследовании ДТП с маневрированием требует тщательной предварительной проработки и обязательного участия квалифицированного специалиста.
  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 0
0



 ,
, .
. .
.