
|
|
Влияние основных параметров на выводы эксперта
При расчетах в процессе исследования ДТП экспертам и специалистам приходится действовать в условиях неполной или недостаточно надежной исходной информации. Многие численные значения следствием и судом указываются приближенно или в большом диапазоне изменения. С другой стороны, при исследовании приходится выбирать численные значения целого ряда параметров из различных таблиц. Поэтому эксперты в своих выводах часто указывают, что полученный результат соответствует «заданным исходным данным и принятым при расчетах…» Чтобы не допустить ошибки, категоричный вывод о возможности предотвращения ДТП водителем можно сделать только в том случае, когда в расчет введены наиболее благоприятные для водителя предельные значения параметров. Рассмотрим это на примере исследования наезда на пешехода в процессе торможения ТС, когда чаще всего сравнивают значение остановочного пути с расстоянием удаления: S О «SУ:
(t 1 + t 2 + 0,5 t 3) V О + V О2/2 jТ «V О × SП / VП – (V О – VН)2/2j Т.
По этим выражениям можно видеть, что при уменьшении замедления однозначно возрастает остановочный путь ТС и уменьшается его удаление от места наезда. Это делает более вероятным вывод об отсутствии у водителя технической возможности предотвратить наезд. Такое же влияние на вывод оказывает увеличение скорости движения пешехода и уменьшение его пути в зоне опасности, так как при прочих равных условиях сокращается расстояние удаления. Увеличение начальной скорости движения ТС при прочих равных условиях в большей мере влияет на увеличение остановочного пути, нежели на рост удаления. Поэтому надежный вывод о наличии технической возможности у водителя предотвратить ДТП своевременным торможением можно сделать только в случае, если принять в расчетах минимально возможное в данных условиях замедление ТС (коэффициент сцепления), максимальную скорость движения пешехода (или минимальный путь в зоне опасности), а также максимальное значение скорости из предлагаемого следствием диапазона. Следовательно, в расчет принимаются такие значения параметров, которые обратным образом влияют на данный вывод. Это главный принцип получения технически обоснованных категоричных выводов. Если эксперту указан диапазон скоростей ТС и пешехода и ему еще приходится брать значения коэффициента сцепления в определенном диапазоне, то следует делать расчеты для разных сочетаний параметров, а результаты расчета представлять для наглядности в виде таблицы. По такой таблице могут быть сделаны разные выводы для соответствующих сочетаний параметров. Эксперт может только указать на наиболее вероятный с технической стороны по его мнению. Большие ошибки могут быть по скорости пешехода. Так, был осужден водитель за наезд на пешехода со смертельным исходом, когда темп движения пешехода был принят «шагом» по показаниям свидетелей и по плохо поставленному следственному эксперименту на основе показаний. Эксперты не обратили внимания на факты, такие как оставленный на правом крыле легкового автомобиля след от пряжки поясного ремня пешехода и попадание его головы на лобовое стекло, которые однозначно указывали на высокий темп движения пешехода. По этим фактам впоследствии расчетом была найдена скорость пешехода, при которой был сделан категоричный вывод об отсутствии у водителя технической возможности предотвратить наезд. Но ошибка военного суда так и не была исправлена, и этим военная карьера водителя была закончена навсегда. В ряде случаев водители применяют маневр поворота с уходом влево и с запоздалым торможением совершают наезд на пешехода даже на стороне встречного движения. При этом путь пешехода и время его движения до наезда возрастают, и по этим данным может быть получен вывод о наличии у водителя технической возможности предотвратить наезд. Но эксперту следует рассматривать и вариант расчета торможения ТС на своей полосе и движения пешехода в пределах этой полосы. В заключении эксперта следует четко указывать, какие конкретнонесоответствия требованиям пп. 4.1 – 4.8 ПДД усматриваются экспертом с технической стороны в действиях пешеходов.
10.4. Безопасные скорости движения ТС в конфликте с пешеходом
Иногда на экспертизу выносится вопрос о том, какой должна была быть скорость ТС, чтобы в данном случае наезда не было. В учебнике [2] рассматриваются пять безопасных скоростей по упрощенной схеме в зависимости от расстояния УП, на котором находился пешеход от полосы движения ТС при заданном удалении SУ, скорости VП пешехода и уровне предельного замедления jТ. Пешеход условно принимается за точку, а габариты ТС длиной L и шириной B. Траектории движения ТС и пешехода пересекаются под углом 90° (рис.10).
Рис. 10. Схема для расчета безопасных скоростей
По этой схеме получаем пять значений безопасных скоростей V 1, V 2, V 3, V 4, V 5. V 1 соответствует условию остановки автомобиля экстренным торможением до места наезда (линии движения пешехода):
S О = SУ, T × V + V 2 /2 jT = SУ.
Из этого уравнения получаем значение первой безопасной скорости:
V 2 – получается из условия опережения автомобилем пешехода, т.е. пешеход не успевает дойти до полосы автомобиля:
V 3 – скорость, при которой пешеход успевает покинуть полосу автомобиля до подхода последнего:
V 4 – скорость, при которой автомобиль успевает пропустить пешехода, применив экстренное торможение:
V 5 – скорость, при которой автомобиль опережает пешехода, даже применив экстренное торможение:
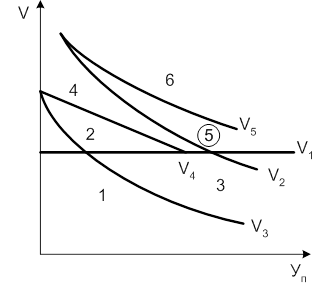
Расчеты безопасных скоростей следует проводить с учетом безопасного бокового интервала И =0,0014 LV. При экспертизе ДТП с наездом на пешеходов чаще всего определяются значения безопасных скоростей V 1, V 2 и V 4. Для определенных значений SУ, jТ (j g), УП, VП, типичных в некоторой конфликтной зоне, можно получить все значения безопасных скоростей и построить сводный график (рис. 11).
Рис. 11. Сводный график безопасных скоростей
На графике можно выделить шесть характерных зон: 1-я зона – ниже кривой V3 – автомобиль пропускает пешехода без торможения; 2-я зона – автомобиль пропускает пешехода при экстренном торможении; 3-я зона – автомобиль может быть остановлен до линии пешехода своевременным торможением; 4-я зона – техническая возможность предотвращения ДТП при принятых данных без манёвра отсутствует (аварийная зона); 5-я зона – автомобиль при торможении производит наезд, а без торможения нет; 6-я зона – даже при интенсивном торможении пешеход не доходит до полосы движения автомобиля. По подобным графикам для разных сочетаний исходных параметров можно делать предварительные выводы по ДТП. Главным же образом подобные графики для типовых конкретных условий движения в населенных пунктах можно использовать для обучения водителей пассажирского транспорта (автобусов, троллейбусов, такси), особенно в период перехода на зимние условия со снижением сцепления.
11. ЭКСПЕРТНОЕ ИССЛЕДОВАНИЕ МАНЕВРОВ ТРАНСПОРТНЫХ СРЕДСТВ
Опасные и аварийные ситуации часто возникают при выполнении водителями маневров левого и правого поворота на перекрестках, а также при перестроениях. Маневры рулевым управлением предпринимаются водителями и при возникновении опасности для движения. В п. 11.1 Правил дорожного движения, действовавших с 1987 г. до 1.07.94 г., было указано: «При возникновении препятствия или опасности, которые водитель в состоянии обнаружить, он должен принять меры к снижению скорости вплоть до остановки транспортного средства или безопасному для других участников движения объезду препятствия». Однако практическое выполнение безопасного объезда препятствия в условиях быстрого развития дорожных ситуаций весьма затруднительно. В Конвенции о дорожном движении в ст. 14 начало любого маневра связывается с обязательным условием убедиться водителю «…что он может это сделать, не подвергая опасности тех пользователей дорог, которые следуют позади него, впереди или навстречу, и с учетом их положения, направления движения и скорости» [18]. В п. 8.1 ПДД с 01.07.94 г. указано, что “…маневр должен быть безопасен и не создавать помех другим участникам движения». А технология выполнения маневров и обеспечение их безопасности изложена в пп.8.1 – 8.12 действующих ПДД РФ. В п. 10.1 действующих в настоящее время ПДД при возникновении опасности для движения водителю предписывается принять только возможные меры к торможению без указания на маневр [19]. Все это в случае конфликта и ДТП создает основания для обязательного обвинения водителя, выполняющего тот или иной маневр в связи с необеспечением им безопасности и созданием помехи. Но при нарушении другими участниками движения ПДД, в том числе с выполнением ими запрещенного обгона или явном превышении скорости, соблюдение условий безопасности с отсутствием помех при любом маневре становится просто невозможным. Почему-то при расследовании забывают, что свободные условия движения без взаимных помех в настоящее время вообще наблюдаются редко. В процессе реального движения водителям приходится выполнять различные маневры: повороты, развороты, перестроения в соседний ряд и следование по криволинейной траектории дороги переменной кривизны. При этом явно увеличивается ширина полосы движения, особенно у автопоездов, возникают центробежные силы и создаются условия для нарушения устойчивости и управляемости ТС. Водители также довольно часто производят маневры с целью объезда внезапно возникшего препятствия или ухода от встречного столкновения. Это наиболее сложные для расчетного исследования маневры.
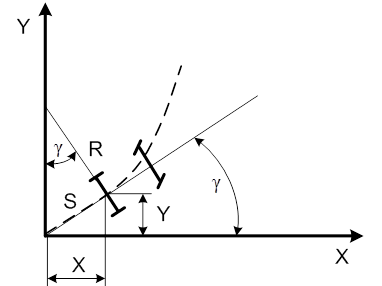
Движение ТС на повороте На повороте при постоянном угле поворота управляемых колес (установившийся поворот) радиус поворота двухосного автомобиля при малой разности углов увода шин передней и задней осей можно определить по соотношению R = L / tga, где L – база автомобиля, a – средний угол поворота управляемых колес.
Рис. 12. Схема поворота ТС
Этот радиус при малой скорости движения, когда малы центробежные силы и можно пренебречь величиной и разностью углов бокового увода шин передних и задних колес, соответствует радиусу траектории центра задней оси. Координаты этого центра (рис. 12) по длине траектории соответствуют произведению радиуса R на угол поворота продольной оси g, а координата Y (поперек проезжей части дороги) определяется по выражению Y = R ×g2 / 2.
Определить возможность проезда ТС в узкий проезд или без выезда при повороте на сторону встречного движения можно графическим построением на масштабной схеме ДТП. Внутренний радиус (минимальный радиус) полосы получается меньше R на половину ширины B автомобиля:
Максимальный радиус находится по выражению
где LП – длина переднего свеса ТС (от передней оси до переднего бампера). Ширина полосы поворота R max – R min возрастает с увеличением угла поворота управляемых колес и базы ТС. Ширина полосы поворота (коридор движения) для автопоездов получается больше, чем для одиночного автомобиля. Они зависят от конкретных геометрических параметров автопоездов. Траектория и занимаемый ими коридор могут быть построены графическим методом [14], а основные геометрические параметры подробно рассматриваются в работах [6,7 и др.]. При таком построении методом припасовывания можно учесть и изменение угла поворота управляемых колес водителем в процессе выполнения поворотов на перекрестках и разворота габаритных ТС. Конфликты часто возникают на правом повороте автопоезда, когда с правой стороны его оставляется определенная ширина проезжей части, чтобы исключить наезд на бордюр задним колесом прицепа (полуприцепа). Зимой зачастую все покрывается снегом и смещением на обочину “расширяют” проезжую часть с увеличением радиуса. В это “расширение” и стремятся проехать спешащие водители легковых автомобилей. И они попадают в “слепую зону”, их в правое наружное зеркало заднего вида водитель тягача не может обнаружить. В процессе поворота происходит касательное столкновение, которое водитель автопоезда может не почувствовать и продолжить движение, пока кто-нибудь его не остановит. За это время осколки могут быть преднамеренно смещены от края проезжей части и создается версия о сложном движении автопоезда сначала влево, а затем неожиданно вправо без включения сигналов поворота для обвинения водителя автопоезда в нарушении пп. 8.1, 8.5, 8.6 ПДД о сигналах маневра, его безопасности, о повороте не из крайнего правого положения и его движении не у края проезжей части. Поэтому эксперту приходится на основе имеющихся данных выявить механизм контактирования ТС и построить траектории их движения на масштабной схеме ДТП. Расчетом можно определить скорости движения ТС и явную возможность ухода легкового автомобиля на поворот раньше автопоезда разгоном от исходного положения с места. По механизму и месту контактирования, конечному положению легкового автомобиля с повреждением, например, левого заднего угла его кузова, следует выявить, не имел ли место в данном случае заход легкового автомобиля на правый поворот с ходу при намерении опередить автопоезд, но из-за резкого поворота тягача к краю проезжей части при выходе его на прямую водителю легкового автомобиля пришлось тормозить, отчего возник занос его задней оси и произошло смещение ТС на полосу автопоезда. Все это наглядно может быть проверено следственным экспериментом с фотографированием взаимных положений ТС в процессе поворота. При левом повороте на дорогу с малой шириной проезжей части дороги и подходящей с левой стороны под углом, меньшим 90°, габаритное ТС, особенно автопоезд, не может в принципе выполнить левый поворот без выезда на сторону встречного движения по требованию п. 8.6 ПДД. А подходящие с левой стороны ТС часто останавливаются непосредственно у линии пересечения проезжих частей. Происходит столкновение либо со стоящим ТС, либо с подкатывающимся к этой линии. В последнем же случае возникает конфликт: невыполнение водителем поворачивающего ТС требования п.8.6 ПДД, а водитель подходящего слева ТС должен был выполнить пп. 13.8 и 13.11 ПДД – уступить дорогу поворачивающему ТС своевременным торможением. Для этого придется найти начальную скорость подходящего с левой стороны ТС и скорость в момент столкновения. Часто эксперту приходится отвечать на вопросы о соответствии данного пересечения вообще условиям безопасности. Конфликт из-за расширения полосы движения может возникать на криволинейных участках дорог при выполнении опережения или обгона автопоездов. Построением масштабной схемы можно выявить ошибку водителя опережающего или обгоняющего ТС по выполнению им требования п. 9.10 ПДД о безопасном боковом интервале.
  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 .
. ;,
;,  .
. ;
;  .
. ;
;  ;
;  ;
; .
.
 ;
; ;
; .
.
 .
. ,
,