|
|
Классификация кривых поверхностей
Все многообразие поверхностей можно отнести к двум классам: I класс составляют поверхности, образующие которых кривые линии (нелинейчатые); II класс – поверхности, образованные прямой линией (линейчатые). При отнесении поверхностей к классам I или II во внимание принималась геометрическая часть определителя – вид линии, образующей поверхность. Условия алгоритмической части определителя, характеризующие закон движения образующей, позволяют выделить из этих двух классов три подкласса. 1 подкласс содержит поверхности, образованные поступательным перемещением образующей линии. Такие поверхности называют поверхностями параллельного переноса, определитель Ф(g; d)(рис.8).
Рис. 8
Линейчатые поверхности с одной криволинейной направляющей называются торсами. 2 подкласс составляют поверхности, образованные вращением образующей линии(рис.9).
Рис. 9
3 подкласс включает поверхности, образованные винтовым перемещением образующей(рис.10).
Рис. 10
Поверхности подклассов1,2 и 3 имеют одинаковую геометрическую часть определителя. В зависимости от вида образующей (кривая или прямая) поверхности параллельного переноса, вращения, винтовые могут быть отнесены как к первому (g – кривая), так и ко второму (g – прямая) классам.
Линейчатые поверхности
Линейчатая поверхность в общем случае однозначно определяются тремя направляющими линиями, Классификация линейчатых поверхностей в зависимости от вида определителя, содержащего информацию о числе направляющих, показаны на рисунке 11.
Рис.11. Классификация линейчатых поверхностей
Из рисунка 11видно что все многообразие линейных поверхностей может быть отнесено к трем группам: группа А – линейчатые поверхности с тремя направляющими; группа Б – линейчатые поверхности с двумя направляющими; группа В – линейчатые поверхности с одной направляющей. Винтовые поверхности
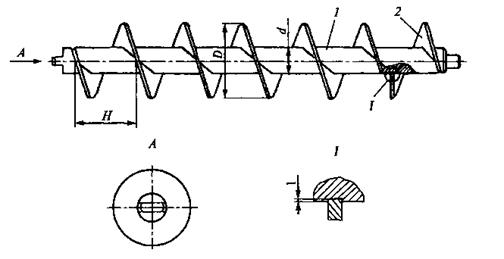
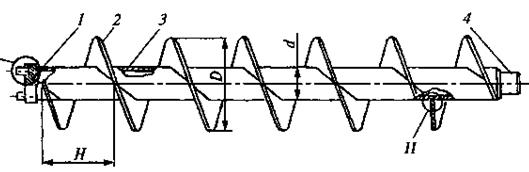
Поверхность называется винтовой, если она получается винтовым перемещением образующей. В зависимости от формы образующей отдельные виды винтовых поверхностей могут быть отнесены как к классу линейчатых поверхностей, так и к классу нелинейчатых поверхностей. Выделение этих поверхностей в самостоятельный подкласс связано со стремлением подчеркнуть значение винтовых поверхностей в технике, архитектурно строительной практике и, особенно, в машиностроении. Винтовая поверхность с криволинейной образующей показана на рисунке 10. Винтовая поверхность с прямолинейной образующей и направляющей винтовой линией показана так же на рисунке 10. Все точки образующей при винтовом движении описывают винтовые линии, каждая из которых может служить направляющей поверхности. Такие линии называют винтовыми параллелями. Все винтовые параллели имеют одинаковый шаг, называемый шагом винтовой поверхности. Характерной особенностью для винтовых поверхностей с постоянным шагом является постоянство угла наклона прямолинейной образующей к направляющей плоскости, за которую принята плоскость, перпендикулярная оси винтовой поверхности. Винтовая линия постоянного шага, построенная на поверхности прямого кругового цилиндра, называется гелисой. Поэтому линейчатые винтовые поверхности, направляющая которых – гелиса, называются геликоидами. В зависимости от угла наклона образующей к оси геликоида бывают прямыми, если этот угол равен 90º и косыми (наклонными), если угол произвольный, отличный от 0º и 90º. В свою очередь, прямые и косые геликоиды подразделяются на закрытые и открытые. Признаком такого деления служит взаимное расположение оси геликоида и его образующей. Если образующая и ось пересекаются, то геликоид называют закрытым, если скрещиваются – открытым. Следует отметить одно важное свойство винтовых поверхностей, состоящее в том что эти поверхности, так же как и поверхности вращения, могут сдвигаться, т.е., совершая винтовое перемещение, поверхность скользит вдоль самой себя. Это свойство обеспечивает винтовым поверхностям широкое применение в технике. Винты, шнеки, сверла, пружины, поверхности лопаток вентиляторов, рабочие органы сельскохозяйственных машин, конструкции винтовых лестниц – вот далеко не полный перечень технического использования винтовых поверхностей. Практическое применение винтовые поверхности находят в курсовом проектировании по дисциплинам: «Подъемно-транспортные машины», «Механизация животноводства», «Сельскохозяйственные машины» и другим, в дипломном проектировании винтовых транспортеров (шнеков) для перемещения зерна, мелкокусковых материалов и др., шнековых прессов для цехов кормопроизводства, маслоцехов, соковыжимных цехов. На рисунках 154, 155 даны примеры шнеков прямоугольного профиля со сплошным и полым валом.
Рис. 12. Шнек со сплошным валом: 1 — вал; 2 — виток
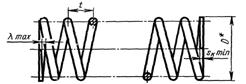
Рис. 13. Шнек с полым валом: 1 — опорная цапфа; 2 — виток; 3 — полый вал; 4 — ведущая цапфа; На рисунках 14а, 14б даны примеры пружин сжатия, растяжения.
Рис. 14а. Пружина сжатия с предварительно обработанными концами заготовки
Рис. 14б. Пружина растяжения
Поверхности вращения Поверхностью вращения общего вида называют поверхность, которая образуется произвольной прямой или кривой (плоской или пространственной) при ее вращении вокруг неподвижной оси. Каждая точка образующей при вращении вокруг оси описывает окружность с центром на оси вращения. Эти окружности называют параллелями. Наибольшую параллель называют экватором. Плоскости, проходящие через ось поверхности вращения, называют меридиональными, а линии, по которым они пересекают поверхность, – меридианами. Меридиональную плоскость, параллельную плоскости проекций π2, принято называть главноймеридиональной плоскостью, а линию пересечения с поверхностью вращения – главным меридианом. При задании поверхности вращения на чертеже обычно указывают проекции ее оси, главного меридиана и экватора. В технике, в частности в машиностроении, поверхности вращения находят широкое применение. Это объясняется распространенностью вращательного движения на станках. Особенно распространены поверхности, имеющие в меридиональном сечении кривую второго порядка или две прямые, на которые распадается эта кривая. Некоторые поверхности вращения представляют собой частные случаи поверхностей, в качестве образующей которых является окружность. В зависимости от взаимного расположения окружности (или ее дуги) и оси вращения можно получить различные поверхности: 1) тор (рис. 15 – 18); тором называется поверхность, которая может быть получена при вращении окружности вокруг оси, не проходящей через ее центр. В зависимости от соотношения величин R – радиуса образующей окружности и расстояния t от центра окружности до оси вращения поверхности тора подразделяют: а) открытый тор (или кольцо) при R<t – окружность не пересекает ось вращения(рис.15);
Рис. 15
б) замкнутый тор, R = t(рис.158);
Рис.16
в) самопересекающийся тор, R>t(рис.159);
Рис.17
2)цилиндр вращения (рис.18);
Рис.18
3) конус вращения (рис.19);
Рис.19
Для цилиндра и конуса вращения меридианы являются прямыми линиями – в первом случае параллельными оси и равноудаленными от нее, во втором случае пересекающими ось в одной и той же точке, под одним и тем же углом к оси. Меридиан цилиндра на рисунке 160 – прямоугольник, а конуса на рисунке 161 – треугольник. 4) сфера (рис.20);
Рис. 20
Сфера образуется в том случае, когда центр окружности принадлежит оси вращения. Сферу можно рассматривать как частный случай тора, у которого t=0. 5) гиперболоид вращения (рис. 21);
Для гиперболоида вращения меридианом является гипербола, причем если осью вращения служит действительная ось гиперболы, то образуется двуполостный гиперболоид вращения; если же вращать гиперболу вокруг её мнимой оси, то однополостный. Однополостный гиперболоид вращения может быть образован также вращением прямой линии в случае, если образующая и ось вращения – скрещивающиеся прямые. На рисунке 21 показан однополостный гиперболоид вращения, образованный вращением прямой АВ вокруг указанной оси и ограниченный двумя параллелями. На однополостном гиперболоиде вращения можно нанести прямолинейные образующие в двух направлениях, например так, как показано на рисунке 21, и с наклоном в обратную сторону, под тем же углом к оси. Кроме прямых (пар) на этой поверхности могут быть ещё гиперболы, параболы, эллипсы и окружности.
Рис. 21
Для параболоида вращения меридианом является парабола, ось которой служит осью поверхности. Для эллипсоида вращения меридианом является эллипс. Поверхность может быть образована вращением эллипса вокруг его большой оси («вытянутый» эллипсоид вращения) или вокруг его малой оси («сжатый» эллипсоид вращения)(рис. 22).
а) «вытянутый» эллипсоид б) «сжатый» эллипсоид Рис. 22
Особенно часто встречаются в курсовом и дипломном проектировании валы, оси, шкивы, крышки, шестерни и т.д. Примеры приведены на рисунках 23 – 26.
Рис. 23. Вал – шестерня
Рис. 24. Зубчатое колесо
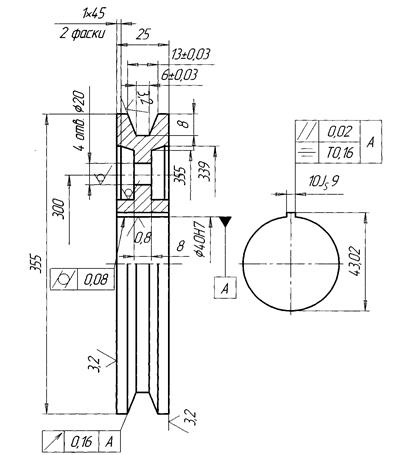
Рис. 25. Шкив
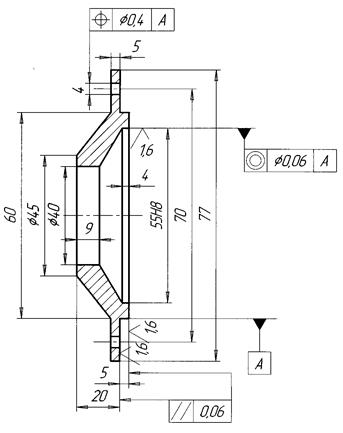
Рис. 26. Крышка   ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|