
|
|
ЧИСЛЕННЫЕ МЕТОДЫ ПОСТРОЕНИЯ ПОЛЕЙ ЛИНИЙ СКОЛЬЖЕНИЯ
Задачи о плоской деформации решаются либо путем элементарных построений линий скольжения, либо путем графических построений (подробно см. [43]), либо численными методами. Следуя работам [15, 2], кратко изложим численные методы. При проведении расчетов приходится часто встречаться с тремя типами краевых задач: задачей Коши, задачей Римана и смешанной задачей. Задача Коши. Задана дуга MN, а на ней нормальное и касательное напряжения Разбиваем дугу MN на ряд отрезков точками с индексами (0,0), (1,1), (2,2) и т. д. Из каждой такой точки выходит по две характеристики (рис.8.28, а). Определим
В этих линейных алгебраических уравнениях неизвестны лишь (остальные величины известны из краевых условий). Решая эту систему уравнений, получим
Рис. 8.28. Схема к численному определению напряженно–деформированного состояния В плоской задаче Зная
Теперь определим координаты узлов. Начнем расчет с точек, соседних к заданной границе MN. Рассмотрим, например, точку (0,1). Дифференциальные уравнения характеристик заменим уравнениями в конечных разностях. Для характеристики, проходящей через точки (0,0) и (0,1), запишем
Значение
Подобным образом можно в конечных разностях записать уравнение второй характеристики, которая соединяет точки (0,1) и (1,1). Получим два алгебраических уравнения линейных относительно искомых величин
из которых можно определить Аналогично решается задача и для скоростей. Пусть на MN известны компоненты и, v. Тогда для точки (0,1) можно записать вдоль характеристики, соединяющей точки (0,1) и (0,0), уравнение Гейрингер (3.17) в конечных разностях
за величину v принимаем среднее значение
Вдоль характеристики, соединяющей точки (0,1) и (1,1)
Из этих уравнений можно определить два неизвестных
Следует заметить, что вдоль характеристик возможны разрывы скоростей, направленные по касательной к данной характеристике. Нормальная составляющая не может иметь разрывов. Так, например, вдоль характеристик Задача Римана. Даны две характеристики (рис. 8.28, б), пересекающиеся в точке О: ОМ —
а вдоль (т, 0) — (т, п)
Следовательно, можно записать
Отсюда
После определения
. Из этих уравнений просто определяются Если одна из данных линий скольжения прямая, то по теореме Генки все линии этого семейства в области OMKN прямые, а линии второго семейства — кривые, им ортогональные — это существенно упрощает решение задачи. Бывают случаи, когда радиус кривизны одной из линий скольжения, например ON, стремится к нулю, в то время как Для скоростей течения обычно задаются нормальные компоненты скоростей на характеристиках. На ОМ задана величина v, на ON — и. Применением уравнений Гейрингер вдоль характеристик можно определить и на ОМ и Нормальная компонента скорости обязательно непрерывна, а тангенциальная, как уже указывалось, может иметь на характеристике разрыв, причем величина разрыва вдоль характеристики постоянна. Смешанная задача. Дана линия скольжения ОМ (рис. 8.28, г), на которой известны Линия ОМ разделяется на некоторое число дуг точками (0,0), (1,0), (2,0), (3,0) и т. д., которые определят точки (1,1), (2,2), (3,3) и т. д. на линии ON. Для этого из точки (1,0) проведем линию В задачах этого типа уже нельзя независимо определить Решение, конечно, значительно упрощается, если вдоль ON значение Относительно задачи для скоростей можно сказать следующее. Если на ОМ дан нормальный компонент v, а на ON соотношение между и, v f (и, v) = 0, то задача имеет решение, если О не является особой точкой. При численных расчетах применяются уже рассмотренные уравнения в конечных разностях. Например, для точки (1,1) на ON:
Часто функция Рассмотренный кратко метод линий скольжения можно признать основным для анализа напряжений в плоском деформированном состоянии. Жесткопластическая схема Поле линий скольжения, представленное на рис.8.16, существенно отличается от полей, показанных на рис.8.17, 8.19, 8.20, 8.21,а и 8.22. В первом случае линии скольжения распространяются от одной границы — нагруженной к другой — свободной. Во втором случае поля линий скольжения не охватывают всего объема металла. Легко усмотреть, что при попытке продлить, расширить любое из указанных полей линий скольжения нарушается какое-либо из условий правильного их построения. Любая другая линия скольжения, дополнительно проведенная или продолженная, например а' Таким образом, при построении полей линий скольжения в общем случае наблюдается, что объем металла разделяется на две области: одна область пластическая, занимаемая полем, другая же считается жесткой. При этом предполагается, что металл на границе областей скачкообразно переходит в пластическое состояние. Такая концепция, широко применяемая при решении различных задач, носит название жесткопластической схемы. На рисунках видно, что границами, разделяющими пластические и жесткие зоны, являются линии скольжения. Этими границами могут быть и огибающие линий скольжения (см. рис.8.21). Правильность построения поля линий скольжения с наличием жесткопластической границы определяется двумя условиями: пересечение линиями скольжения осей симметрии под углом 45° и контакт жестких зон в одной точке (точка О на рис. 8.22). В точке контакта все компоненты напряжений, определяемые по двум соприкасающимся полям линий скольжения, равны между собой. Жесткопластическая граница, как правило, заранее не задана, и определение ее является составной частью решения задачи методом линий скольжения. Вместе с тем жесткопластическую схему можно применять и при решении задач другими методами, причем жесткопластической границей в этом случае бывает необходимо задаться на основании экспериментальных данных или каких-либо соображений, лежащих в основе применяемого решения. Жесткопластическая схема представляет собой концепцию математического порядка. Физически никакой резко выраженной жесткопластической границы нет. Существует определенный приграничный слой, в котором приращения упругих и пластических деформаций вполне сравнимы. Поэтому жесткопластическая схема отнюдь не предопределяет физически точных решений. В настоящее время делают попытки (Е. М. Макушок) выявить напряженно–деформированное состояние в переходных зонах, что дает перспективы получения уточненных решений [23].   Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 и
и  а, следовательно, известны
а, следовательно, известны  и
и  (их просто вычислить).
(их просто вычислить).
 и
и 
 , (3-18) (8.61)
, (3-18) (8.61) . (3.18а) (8.61,а)
. (3.18а) (8.61,а)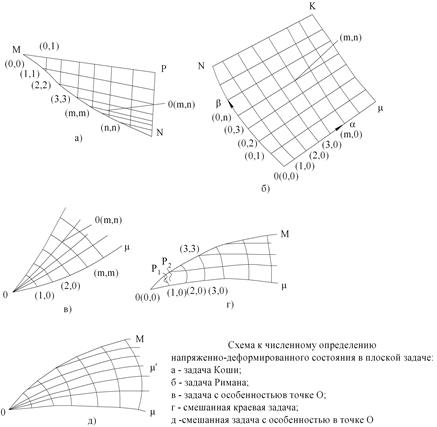

 -
- .
. и
и  —координаты точки (0,1). Далее можно таким же образом определить координаты точек (1,2), (2,3) и т. д. для всего первого соседнего с MN ряда. Затем можно найти координаты точек второго ряда. Точка (0,2) будет определена, если записать в конечных разностях уравнения характеристик, соединяющих ее с известными уже точками (0,1) и (1,2), координаты которых уже определены, и т. д.
—координаты точки (0,1). Далее можно таким же образом определить координаты точек (1,2), (2,3) и т. д. для всего первого соседнего с MN ряда. Затем можно найти координаты точек второго ряда. Точка (0,2) будет определена, если записать в конечных разностях уравнения характеристик, соединяющих ее с известными уже точками (0,1) и (1,2), координаты которых уже определены, и т. д. .
. .
.
 и
и  .Далее определяем скорости в точке (1,2) и т. д. во всем ряду по соседству с линией MN. Затем таким же путем в следующем ряду. В общем случае для любой точки (т, п) система уравнений будет
.Далее определяем скорости в точке (1,2) и т. д. во всем ряду по соседству с линией MN. Затем таким же путем в следующем ряду. В общем случае для любой точки (т, п) система уравнений будет '
' может терпеть разрыв скорость u и не может иметь разрыва скорость v, т. е. скорость и справа и слева от линии
может терпеть разрыв скорость u и не может иметь разрыва скорость v, т. е. скорость и справа и слева от линии  . На характеристиках известны
. На характеристиках известны  ,
, .
. „.
„. (3.19) (8.62)
(3.19) (8.62) (3.19a) (8.62,а)
(3.19a) (8.62,а)
 и
и  . Затем можно определить координаты (2,1) или (1,2) и т. д. Предпочтительнее определять последовательно точки вдоль одной характеристики, а потом переходить к следующей.
. Затем можно определить координаты (2,1) или (1,2) и т. д. Предпочтительнее определять последовательно точки вдоль одной характеристики, а потом переходить к следующей. .Тогда точка О является особой точкой и все характеристики пересекаются в точке О. Можно сказать, что в условиях дана характеристика ОМ и особая точка О. Формулы (8.62) и (8.62,а) сохраняют силу, но теперь
.Тогда точка О является особой точкой и все характеристики пересекаются в точке О. Можно сказать, что в условиях дана характеристика ОМ и особая точка О. Формулы (8.62) и (8.62,а) сохраняют силу, но теперь  — угол между линиями ОМ и ОР точке О, где Р —данная точка (т, п) (рис.8.28, в). Метод вычисления координат точек тот же, что и ранее. Поле, заданное линией ОМ и особой точкой О, можно продолжить на любой угол вокруг О, пока его не ограничат другие краевые условия.
— угол между линиями ОМ и ОР точке О, где Р —данная точка (т, п) (рис.8.28, в). Метод вычисления координат точек тот же, что и ранее. Поле, заданное линией ОМ и особой точкой О, можно продолжить на любой угол вокруг О, пока его не ограничат другие краевые условия. на ON. После этого, заменяя уравнения Гейрингер уравнениями в конечных разностях, определяют и, v в узлах сетки. Для точки (т, п) можно определить
на ON. После этого, заменяя уравнения Гейрингер уравнениями в конечных разностях, определяют и, v в узлах сетки. Для точки (т, п) можно определить  ,
,  , если уже известны и, v в точках (т — 1, п) и (т, п — 1). Формулы для вычислений совпадают с формулами, выведенными для задачи Коши.
, если уже известны и, v в точках (т — 1, п) и (т, п — 1). Формулы для вычислений совпадают с формулами, выведенными для задачи Коши. ее пересечения с ON. Это первое приближение. Далее найдем
ее пересечения с ON. Это первое приближение. Далее найдем  соответствующее точке Р
соответствующее точке Р  (
( , и найдем точку Р2 —второе приближение и соответствующее ей значение
, и найдем точку Р2 —второе приближение и соответствующее ей значение  . Далее проводим из точки (1,0) отрезок, соответствующий
. Далее проводим из точки (1,0) отрезок, соответствующий  и т. д. Этот процесс повторяют, пока различие между последовательными приближениями станет достаточно малым.
и т. д. Этот процесс повторяют, пока различие между последовательными приближениями станет достаточно малым. .
.
 такова, что компонента скорости, нормальная к ON, равна нулю.
такова, что компонента скорости, нормальная к ON, равна нулю. ' на рис. 8.22 и
' на рис. 8.22 и  на рис.8.19, пересечет вертикальную ось симметрии под углом, отличающимся от 45°, т. е. покажет наличие сдвигающих напряжений на оси симметрии, что абсурдно.
на рис.8.19, пересечет вертикальную ось симметрии под углом, отличающимся от 45°, т. е. покажет наличие сдвигающих напряжений на оси симметрии, что абсурдно.